XiaoMi-AI文件搜索系统
World File Search System减速器
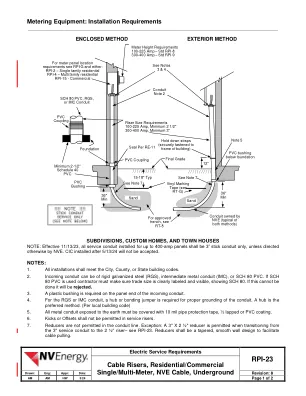
电缆立管,住宅单表,地下
1. 所有安装均应符合市、县或州的建筑规范。2. 进线导管可采用硬质镀锌钢 (RGS)、中间金属导管 (IMC) 或 SCH 80 PVC。如果使用 SCH 80 PVC,承包商必须确保贸易尺寸标记清晰且可见,显示 SCH 80。如果做不到这一点,将被拒绝。3. 进线导管的面板端需要使用塑料套管。4. 对于 RGS 或 IMC 导管,需要使用集线器或接地跳线来正确接地。集线器是首选方法。(根据当地建筑规范)5. 所有暴露在地面上的金属导管必须覆盖 10 mil 管道保护胶带、½ 搭接或 PVC 涂层。6. 服务立管中不允许出现踢脚或偏移。7. 导管管线中不允许使用减速器。例外:从 3 英寸服务管道过渡到 2 ½ 英寸立管时,允许使用 3 英寸 X 2 ½ 英寸减径管 - 请参阅 RPI-23。减径管应为锥形、壁面光滑的设计,以方便拉动电缆。

多电动飞机评论
多电动飞机综述 A. A. AbdElhafez ∗ , A. J. Forsyth ∗∗ 摘要:多电动飞机 (MEA) 强调利用电力为非推进式飞机系统供电。采用 MEA 可实现许多优势,例如优化飞机性能并降低运营和维护成本。此外,MEA 减少了飞机的空气污染气体排放,这有助于解决气候变化问题。然而,MEA 对飞机电气系统提出了一些挑战,无论是在所需电量还是在电能的处理和管理方面。本文介绍了对 MEA 的综述。综述包括发电和电力系统架构的不同选项。关键词:MEA,发电,电力电子,电力系统 1.引言 近年来,航空工业在民用和军用领域都取得了巨大的进步,例如目前一些商用客机的重量超过 300 000 公斤,能够以 1000 公里/小时的速度不间断飞行 16 000 公里[1-4]。非推进式飞机系统通常由不同类型的二次动力组合驱动,例如液压、气动、电力和机械动力[1-3, 5- 7]。这些动力由不同的学科从飞机主发动机中提取。例如,机械动力通过从动轴从发动机获得,并由减速器驱动
009-91 FY-24 NAVSEA 标准项目 FY-24 项目编号
NAVSEA 标准项目 FY-24 项目编号:009-91 日期:2022 年 10 月 25 日 类别:II 1.范围:1.1 标题:螺旋桨就位检查;完成 2.参考:2.1 S9086-HP-STM-010/CH-245,螺旋桨和推进器 3.要求:(I)“目视检查”3.1 按照 2.1 第 3 节清洁并完成每个螺旋桨和螺旋桨盖的目视检查。3.2 记录 3.1 中获取的所有检查数据。3.2.1 以经批准的可传输介质提交一份已填妥的螺旋桨目视技术检查报告表 NAVSEA 9245/3 的清晰副本,列出目视检查结果以及显示任何裂纹或缺陷的大小和位置的草图,提交给监督人员。3.2.2 用金属边缘保护装置覆盖每个螺旋桨叶片的整个周边,并根据 2.1 用钢带固定。3.3 将每个螺钉和插头固定在每个螺旋桨盖的外部,以防止脱落。(V)“检查叶片对准” 3.4 检查主减速器联轴器法兰上每个螺旋桨叶片上“BLADE”字样的存在和准确性。3.4.1 在每个螺旋桨叶片上印上“BLADE”字样的联轴器轮毂。印记必须是 1/8 英寸到 1/4 英寸的字母,低应力标记。禁止蚀刻。3.5 在脱离对接之前,拆除 3.2.2 中安装的叶片边缘保护装置。
009-91 日期:2023年10月1日 类别:II 1. 范围:1.1 Tit
NAVSEA 标准项目 FY-25 项目编号:009-91 日期:2023 年 10 月 1 日 类别:II 1. 范围:1.1 标题:螺旋桨在位检查;完成 2. 参考:2.1 S9086-HP-STM-010/CH-245,螺旋桨和推进器 3. 要求:(I)“目视检查”3.1 按照 2.1 第 3 节清洁并完成每个螺旋桨和螺旋桨盖的目视检查。3.2 记录 3.1 中获取的所有检查数据。3.2.1 以批准的可传输介质提交一份清晰易读的完整螺旋桨目视技术检查报告表 NAVSEA 9245/3 副本,列出目视检查结果以及显示任何裂纹或缺陷的大小和位置的草图3.2.2 用金属边缘防护装置覆盖每个螺旋桨叶片的整个周边,并根据 2.1 用钢带固定。 3.3 将每个螺钉和塞子固定在每个螺旋桨盖的外部,以防止其脱落。 (V)“检查叶片对准” 3.4 检查主减速器联轴器法兰上每个螺旋桨叶片上“BLADE”字样的存在和准确性。 3.4.1 在联轴器轮毂上印上与每个螺旋桨叶片对齐的“BLADE”字样。印记必须是 1/8 英寸到 1/4 英寸的字体,低应力标记。禁止蚀刻。 3.5 在脱离船坞之前,拆除 3.2.2 中安装的叶片边缘保护装置。

人类对象集成的组装意图
摘要:人类机器人协作(HRC)组装结合了机器人操作10的优势与人类的认知能力和适应性,这为11个复杂的组装任务提供了一种有效而灵活的方式。在HRC组装过程中,机器人需要准确地了解操作员的意图12,以帮助协作组装任务。目前,考虑13个上下文信息(例如复杂环境中的汇编对象),操作员的意图识别仍然具有挑战性。在本文中,我们14提出了一种人为对立的综合方法,用于在HRC中进行上下文感知的组装意图识别,15,该方法集成了对组装行动和组装零件的识别,以提高16个操作员的意图识别的准确性。具体来说,考虑到HRC组件的实时要求,使用基于骨架功能的17个时空图卷积网络(ST-GCN)模型可用于18识别汇编操作,以减少不必要的冗余信息。考虑到这种疾病和19个组装部分的闭塞,提出了改进的Yolox模型,以提高20个网络结构对组装部分的聚焦能力,这些零件难以识别。之后,以减速器汇编21个任务为例,一种基于规则的推理方法包含汇编22个操作和组装零件的识别信息,旨在识别当前的组装意图。最后,验证了识别人类意图的拟议方法的可行性和23个有效性。2624个组装行动识别和组装部分识别的集成可以促进准确的操作员在复杂而灵活的HRC组装环境中的准确操作员的意图25识别。