XiaoMi-AI文件搜索系统
World File Search System到达时间

使用超声波信号熵进行损伤检测...
摘要。用于传播导波的压电超声波传感器可用于检查工程结构中的大面积区域。然而,导波声信号固有的色散和噪声、结构中的多重回波以及缺乏近似或精确的模型,限制了它们作为连续结构健康监测系统的使用。在本文中,研究了在板状结构上随机放置压电传感器网络以检测和定位人为损坏的实现。在厚度为 1.9 毫米的铝薄板上设置了一个以一发一收配置工作的宏纤维复合材料 (MFC) 传感器网络。使用离散小波变换在时间尺度域中分析信号。这项工作有三个目标,即首先使用传感器网络产生的超声波的短时小波熵 (STWE) 开发基于熵分布的损伤指数,其次确定备用宏光纤复合材料 (MFC) 传感器阵列检测人为损伤的性能,第三对收集的信号实施到达时间 (TOA) 算法,以定位人造圆形不连续的损伤。我们的初步测试结果表明,所提出的方法为损伤检测提供了足够的信息,一旦与 TOA 算法相结合,就可以定位损伤。
空中交通管制领域的低保真原型设计
正如《空中交通管理总体规划》(SESAR,2015 年)中所述,重大变化将影响未来欧洲空中交通的处理方式。而在 20 年内,空中交通量应该会翻一番,同时地面和空中的延误应该会减少 30%。总体安全性也应该得到改善。与使用标准航路不同,实施 4D 航迹将确保航班“尽可能长时间地沿着几乎不受限制的最佳航迹飞行 [...] 以非常准确地满足指定点的到达时间”(SKYbrary,2017a)。为了能够处理这些创新,空中交通管制员 (ATCO) 需要适当的工具,尤其是用于可视化 4D 航迹的工具。开发安全关键工作环境领域的软件非常具有挑战性,因为操作错误可能会导致致命事故。有必要尽可能密切地与用户组合作,了解他们的需求,并开发出有机会被这些专家用户接受的解决方案。在研究项目 VAST(虚拟空域和塔台)中,将探索可视化和声音化复杂空中交通场景的新概念。该团队遵循以用户为中心的设计流程(Nor-man,2013),并开发了三个低保真原型,以便尽早与 ATCO 一起对其进行评估

航空事故调查局
AAIB 印度航空事故调查局 ACARS 航空器通信寻址和报告系统 AI MUM HF 印度航空运营 HF AME 航空器维修工程师 AMSL 高于平均海平面 AOCC 航空公司运营控制中心 APP 进近 ARC 适航审查证书 ATC 空中交通管制 ATPL 航空运输飞行员执照 AUW 总重量 CAM 驾驶舱区域麦克 适航证书 CAR 民航要求 CCIC 客舱乘务长 CFIT 可控飞行撞地 CISF 中央工业安全部队 CPL 商用飞行员执照 CTC 连续 CVR 驾驶舱语音记录器 DFDR 数字飞行数据记录器 DGCA 民航总局 DME 测距设备 DVOR 多普勒甚高频全向测距仪 ETA 预计到达时间 FCOM 飞行机组操作手册 FCTM 飞行机组训练手册 FIR 飞行信息区 FO 副驾驶 FOD 外来物碎片 FL 飞行高度层 FRTOL 飞行无线电话操作员执照 GP 下滑道 HIRL 高强度跑道灯hrs 小时 IATA 国际航空运输协会 ICAO 国际民用航空组织 IOCC 综合运行控制中心 ILS 仪表着陆系统 LLZ 航向道
电动汽车充电会话分类...
1助理。教授,2,3,4 UG学者1,2,3,4人工智能和机器学习部,印度海得拉巴的Guru Nanak机构技术校园(自治)。摘要:在过去的十年中,电动汽车(EV)的使用迅速增加使得有必要准确估算电动汽车充电所需的能量。电动汽车现在主要使用锂离子电池进行存储;保护这些电池免受过度充电可以延长其寿命并保持健康。这项研究提出了一个机器学习模型,用于预测基于K-Neared邻居分类方法的EV充电会话的长度。通过正确对事件进行分类,该模型可以预测电荷将持续多长时间。每个班级都有充电事件,每个班级都持续一段时间。该程序仅使用数据开始时可用的数据(到达时间,启动SOC,日历数据)。进行灵敏度分析以评估各种输入的效果,并使用包括来自100多名用户的充电会话记录的实际数据集对模型进行验证。与基准模型相比,性能的改进证明了该模型的功效。索引 - 电动汽车,充电会话,分类技术,优化的电池充电,机器学习。

使用桥接进行对象跟踪中的贝叶斯意图预测...
摘要 — 在人机交互、监视和防御等多个应用领域中,确定被跟踪对象的意图可使系统协助用户/操作员并促进有效的、可能自动化的决策。在本文中,我们提出了一种概率推理方法,可以提前预测被跟踪对象的预期目的地及其未来轨迹。在本文介绍的框架内,观察到的物体部分轨迹被建模为终止于其目的地的马尔可夫桥的一部分,因为目标路径虽然是随机的,但必须在预期的端点结束。这捕获了轨迹中潜在的长期依赖关系,如物体意图所决定的。通过确定从特定构造的桥梁绘制部分轨迹的可能性,可以评估多个可能目的地中的每一个的概率。这些桥梁还可用于生成潜在系统状态的精确估计(例如物体位置、速度等),预测其未来值(直到到达指定终点)并估计到达时间。这被证明可以实现基于卡尔曼滤波器的低复杂度推理程序实现,其中可以应用任何线性高斯运动模型,包括目的地恢复模型。在仪表车辆中收集的自由手势数据和驶向多个可能港口的船只的合成轨迹被用于证明所提出方法的有效性。

配电网中储能与光伏极速充电站的优化配置
摘要:由于充电时间短,电动汽车 (EV) 的超快速充电 (XFC) 近来兴起。然而,XFC 站的电动汽车超高充电功率可能会严重影响配电网。本文讨论了当前配电网中 XFC 站充电功率需求的估计以及使用可再生能源的多个 XFC 站的设计。首先,利用从车辆行驶调查数据集中获得的电动汽车到达时间和充电状态 (SOC) 分布创建了一个蒙特卡洛 (MC) 模拟工具。考虑各种影响因素以获得对 XFC 站充电功率需求的实际估计。然后,提出了一种确定配电网中多个 XFC 站的储能系统 (ESS) 的最佳能量容量、ESS 额定功率和光伏 (PV) 板尺寸的方法,目的是实现最佳配置。最佳功率流技术应用于此优化,以便最佳解决方案不仅满足充电需求,还满足与 XFC、ESS、PV 板和配电网相关的运行约束。用例的仿真结果表明,提出的MC仿真可以估计近似现实世界的XFC充电需求,并且配电网中多个XFC站中优化的ESS和PV单元可以降低XFC站的年总成本并提高配电网的性能。

辅助感觉运动干扰影响学习……
训练初始解码器,长度不同,并包含不同数量的自适应解码器变化(闭环解码器自适应 (CLDA) 事件,见方法)。初始 CLDA 的数量在各个系列中有所不同,但旨在提供足够的控制以在整个工作区内移动光标,确保可以达到所有目标。中间系列 CLDA 事件仅旨在在神经测量值发生变化时保持性能。如前所示 [30],性能在多天内得到改善,从而提高了任务成功率并减少了到达时间(图 1C,猴子 J 的选定系列;所有后续单系列示例分析都使用此系列以保持一致性。有关猴子 S 的示例系列,请参见图 S1A,有关猴子 J 的其他示例系列,请参见图 S1C)。解码器在学习过程中进行了调整以调整参数(“仅更改权重”,图 1B)或替换非平稳单元并更新参数(“读出 + 权重更改”,图 1B)。初始解码器训练和读出集合变化时的读出单元选择仅基于单元记录属性(例如测量的稳定性);功能属性,例如有关
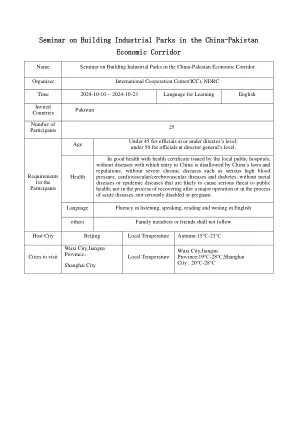
中国经济走廊建筑工业园区的名称研讨会
通知:1。在来中国之前,请准备您的护照,中国签证和第三方过境国家签证(如果需要)。2.如果您由于特殊情况无法按时离开,或者您的航班在转会期间延迟,请与经济和商业顾问办公室或您的项目及时联系,以及时联系北京的最新航班和到达时间。3.原则上,不允许参与者私下更改门票。如果您确实需要更改机票,请联系经济和商业顾问办公室进行更改程序。如果您未经许可更改票证,我们将向经济和商业顾问办公室告知这种情况,您将负责发生的任何费用和责任。4.拿起行李后,请耐心等待国际抵达出口(或国内抵达出口),工作人员将带着带有您名字的接送标志来接您。如果您等待超过15分钟,则可以通过电话致电联系人。5.如果您的支票行李丢失了,并且您需要在航空公司注册,请通过电话与计划联系人联系,以确认行李的送货地点,然后再填写注册表格。着装要求。请注意研讨会的天气状况并带上适当的衣服。对于研讨会中的重要事件,应要求正式服装(种族着装也可以接受)。
Doc 9694 - 空中交通服务数据链应用手册
ACARS 航空器通信寻址和报告系统 ACAS 机载防撞系统 ADS 自动相关监视 ADS-B 广播式自动相关监视 AIDC 空中交通服务设施间数据通信 AIP 航空信息出版物 ALRT 警报 AMSS 航空移动卫星服务 ASM 空域管理 ATC 空中交通管制 ATFM 空中交通流量管理 ATIS 自动终端情报服务 ATM 空中交通管理 ATN 航空电信网络 ATS 空中交通服务 ATSU 空中交通服务单位 C-ATSU 控制空中交通服务单位 CDA 当前数据机构 CNS 通信、导航和监视 CPDLC 管制员-飞行员数据链通信 D-ATSU 下游空中交通服务单位 DC 离场许可 DDA 下游数据机构 DFIS 数据链飞行信息服务 DLIC 数据链启动能力 DSC 下游许可 EOBT 预计起飞时间 ETA 预计到达时间 FANS 未来空中导航系统发展与过渡规划监测与(第二阶段)协调特别委员会 FASID 设施和服务实施文件FDPS 飞行数据处理系统 FIR 飞行信息区 FIS 飞行信息服务 FMS 飞行管理系统 FOM 性能图 GNSS 全球卫星导航系统 GPWS 近地警告系统
使用桥接分布进行对象跟踪中的贝叶斯意图预测
摘要 — 在人机交互、监视和防御等多个应用领域中,确定被跟踪对象的意图可使系统协助用户/操作员并促进有效的、可能自动化的决策。在本文中,我们提出了一种概率推理方法,该方法可以提前预测被跟踪对象的预期目的地及其未来轨迹。在本文介绍的框架内,观察到的物体部分轨迹被建模为终止于其目的地的马尔可夫桥的一部分,因为目标路径虽然是随机的,但必须在预期的端点结束。这捕获了轨迹中潜在的长期依赖关系,如物体意图所决定的。通过确定部分轨迹从特定构造的桥梁中绘制的可能性,可以评估多个可能目的地中的每一个的概率。这些桥梁还可用于产生潜在系统状态(例如物体位置、速度等)的精确估计,预测其未来值(直到到达指定端点)并估计到达时间。事实证明,这可以实现基于卡尔曼滤波器的低复杂度推理程序实现,其中可以应用任何线性高斯运动模型,包括目的地恢复模型。在仪表车辆中收集的自由手势数据和驶向多个可能港口的船只的合成轨迹可用于证明所提方法的有效性。