XiaoMi-AI文件搜索系统
World File Search System力反馈
对电动舌刺激的初步探索,以提供机器人辅助手术的力反馈
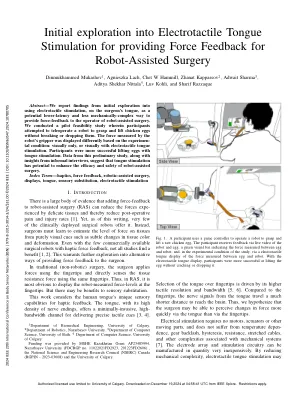
摘要 - 我们报告了最初探索的结果,即使用电动刺激,在外科医生的舌头上,是潜在的较低延迟,机械上的较低的方法,以向机器人辅助手术的操作员提供力反馈。我们进行了一项飞行员可行性研究,其中参与者试图对机器人进行远程操作,以抓住和抬起鸡蛋而不会破裂或掉落它们。根据实验条件,机器人抓地力测量的力以不同的方式显示出不同的显示:仅视觉上或通过视觉上的电动舌刺激。参与者更成功地用舌刺激卵。这项初步研究的数据以及非正式访谈的见解表明,舌刺激有可能增强机器人辅助手术的功效和安全性。索引术语 - 光线,力反馈,机器人辅助手术,显示,舌头,感觉替代,电动刺激

hapticColling:在虚拟工具期间使用僵硬碰撞的未接地力反馈
允许将本工作的全部或一部分供个人或课堂使用的数字或硬副本授予,而没有费用,只要副本不是盈利或商业优势,并且副本带有此通知和首页上的完整引用。必须尊重他人所拥有的这项作品的组成部分的版权。允许用信用摘要。否则复制或重新出版以在服务器上发布或重新分配到列表,需要事先特定的许可和/或费用。请求权限从permissions@acm.org。

体感皮质的生物映射多通道微刺激传达了仿生手的高分辨率力反馈
手动相互作用与对象相互作用受到手的触觉信号的支持。这种触觉反馈可以通过体感皮质(S1)的心脏内微刺激(ICM)在脑控制的仿生手中恢复。在基于ICMS的触觉反馈中,可以通过基于仿生手上力传感器的输出调节刺激强度来发出接触力,这又调节了感知的感觉的幅度。在本研究中,我们在三名参与者中衡量了基于ICMS的力反馈的动态范围和精度,这些参与者植入了S1中的微电极阵列。为此,我们测量了由于ICM振幅增加以及参与者区分不同强度水平的能力而导致的感觉幅度的增加。然后,我们通过实施“仿生” ICMS培训来评估是否可以提高反馈的忠诚度,旨在唤起神经元活动的模式,这些模式更紧密地模仿那些自然接触的人,并一次通过多个通道传递ICMS。我们发现,多通道仿生ICMS产生的感觉比单通道对应物更强,更有区别。最后,我们用仿生手实施了仿生多通道反馈,并让参与者执行合规性歧视任务。我们发现,仿生多通道触觉反馈对单渠道线性对应物产生了改善的歧视。我们得出的结论是,多通道仿生的ICMS传达了精细分级的力反馈,该反馈更接近自然接触所赋予的灵敏度。

Aero-plane:一款在虚拟 2D 平面上呈现重量运动错觉的手持式力反馈设备
摘要 力反馈被认为是虚拟现实 (VR) 的下一个前沿。最近,随着消费者对无线 VR 的推动,研究人员放弃了基于笨重硬件(如外骨骼和机械臂)的解决方案,开始探索更小的便携式或可穿戴设备。然而,在渲染惯性力时,例如移动重物或与具有独特质量特性的物体交互时,当前不接地的力反馈设备无法提供快速的重量转移感觉,无法真实模拟 2D 表面上的重量变化。在本文中,我们介绍了 Aero-plane,一种基于两个微型喷气螺旋桨的力反馈手持控制器,可以在 0.3 秒内渲染高达 14 N 的重量转移。通过两项用户研究,我们:(1)描述用户在使用我们的设备时感知和正确识别虚拟平面上不同运动路径的能力; (2)测试了控制器在两个 VR 应用程序(飞机上的滚动球和使用不同形状和大小的厨房工具)中使用时的真实度和沉浸感。最后,我们展示了一组应用程序,进一步探索我们设备的不同使用情况和替代外形尺寸。

开发力反馈上的第三个旋转输入...
通常,具有力反馈的操纵杆包含两个自由度,足以满足多种用途。然而,在某些情况下,也具有力反馈的第三自由度可用作输入,例如,当需要控制具有四个独立轮子的移动机器人时。这种类型的机器人是 DLR 开发的:Robomobil。三自由度操纵杆将取代传统的驱动元件(方向盘、制动器和加速器),并使驾驶员能够独立地指挥纵向、横向和旋转运动。该系统的优点有很多,例如:将驾驶控制集成在单个设备中、独立指挥运动的可能性或方向兼容等。该项目的目的是研究什么类型的输入适合第三自由度,以及人类前臂运动学的耦合如何影响三自由度操纵杆的控制。考虑到这一点,进行了一项用户研究(一个具有七个自由度的机器人模拟操纵杆的不同模式,并使用触觉设备 Spacemouse 检查是否适合分离任何操纵杆的程度)两个设备的自由)。最后针对第三次GR的实现进行了机械设计