XiaoMi-AI文件搜索系统
World File Search System动作的
健康检查,行动计划和种族:有效性评估
每年的健康检查可以通过在早期确定健康问题来帮助改善学习障碍者的健康。检查可以识别未发现的健康状况和更广泛的健康需求,并有效地促进了解决确定的健康需求的行动,例如疫苗,血液检查,乳房和睾丸筛查,牙科审查,视力以及视力以及听力评估。健康行动计划是围绕学习障碍健康检查的需求不可或缺的一部分。患者应使用该动作的副本离开健康检查,以支持他们管理健康和福祉。
Snohomish公用事业区电池电量存储系统互连
对拟议动作的描述:Bonneville电力管理局(BPA)建议在BPA的Murray变电站中安装遥测设备的接线,并在BPA的控制中心执行相关编程,以互连Snohomish公共公用事业区(PUD)25 MW大型发电机互连电池储能系统(BESS)请求。集成点是Snohomish Pud的新型12.47千万千伏特(KV)交叉风,由BPA Murray 115kV变电站提供。所有BPA工作都限于变电站和控制中心的内部,并且不提出地面干扰。

社区的成人心理健康和福祉基金
我们战略中规定的雄心是我们在未来几年中的驱动重点,我们将定期审查并同意反映当前情况的优先事项。我们知道,我们不能立即将所有内容推向,并与合作伙伴合作,共同同意我们将首先关注的内容。因此,我们已经同意与合作伙伴的一系列优先事项,我们认为应该在未来两年内推动前进。在这两年之后,我们将评估我们与合作伙伴的进度,并确定进一步的优先级。对我们提供此一系列动作的进展的反馈将提供实时的见解,并允许我们根据需要弯曲我们的响应并根据需要重新定位。

气候变化策略2020-2030
气候变化策略将用于在内部和外部促进有关可持续性的对话。只有一系列合作伙伴,例如社区规划伙伴关系和高地和岛屿企业,才能有效地实现一些关键目标,并共同了解可持续性的外观以及我们要实现的目标。还认识到,某些动作的碳还原的实现将部分取决于外部因素,例如从可再生资源和提供外部资金来支持项目和计划的所有电力要求。理事会可以通过多种不同的方式领导这一问题,包括使该问题在本地相关,也可以通过该战略中概述的特定行动进行领导。
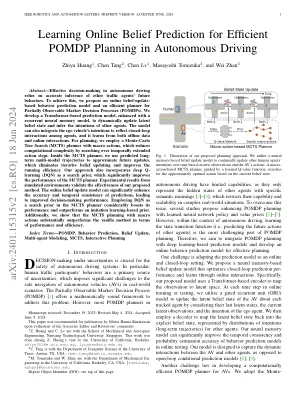
学习在线信念预测自动驾驶中有效POMDP计划
摘要 - 自主驾驶中有效的决策依赖于其他交通代理的未来行为的准确推断。为了实现这一目标,我们提出了一个基于在线信念的行为预测模型,也提出了一个有效可观察到的马尔可夫决策过程(POMDP)的有效计划者。我们开发了一个基于变压器的预测模型,通过复发性神经记忆模型增强,以动态更新潜在信念状态并推断其他代理的意图。该模型还可以整合自我车辆的意图,以反映代理之间的闭环交互,并从离线数据和在线交互中学习。为了计划,我们采用了一个具有宏观动作的蒙特卡洛树搜索(MCT)计划者,从而通过搜索时间扩展的动作步骤来降低计算复杂性。在MCTS计划者中,我们使用预测的长期多模式轨迹来近似未来的更新,从而消除了迭代信念的更新和提高跑步效率。我们的方法还将深度Q学习(DQN)作为搜索事务,从而大大提高了MCTS计划者的性能。模拟环境的实验结果验证了我们提出的方法的有效性。在线信念更新模型可以显着提高预测的准确性和时间一致性,从而改善决策绩效。在MCT计划中,采用DQN作为搜索,大大提高了其性能,并优于基于模仿学习的先验。此外,我们表明,具有宏观动作的MCT计划在性能和效率方面大大优于香草方法。

开发镜像治疗设备
摘要。先前关于大脑活动和动作之间互连的研究导致发现了镜像神经元,神经元具有两个特别重要的作用:它们基于视觉信息介导了模仿运动的模仿,并且是对动作的理解的基础。镜像疗法是一种基于视觉反馈在恢复中的使用,是一种相对较新的非侵入性治疗。自1996年以来,它一直在医疗康复计划中引入,以诸如:中风后的偏瘫,中风后的偏瘫,步态恢复,帕金森患者的指尖改善,减轻幻影肢体疼痛的减轻,截肢后的幻影症和手动疼痛的慢性疼痛,骨关节炎,纤维肌痛和复杂的区域疼痛。本工作主题的设备展示了镜像盒的新建设性变体,该变体在上肢和下肢的水平上提供了一种更有效的方法来应用镜像疗法。对视觉刺激在恢复中的有效性进行了两次评估的结果,在该设备的帮助下进行,首先是关于缺血性中风后瘫痪的受试者的手动功能的恢复,并在治疗手动骨关节炎的受试者慢性疼痛方面进行了第二次评估。关键字:镜像疗法,视觉反馈,神经塑性,动力学记忆,中风,幻影肢体疼痛rezumat。dezvoltarea unui dispozitiv pentru terapiaoglindă。terapia prin oglindire este o terapie相对nouă,先前关于大脑与动作之间互连的研究导致发现了镜像神经元,神经元具有两个非常重要的角色:它们基于视觉信息介导模仿运动,并且是理解动作的基础。

汉斯·尼曼 vs. 你:世界联合 AI 在 2024 年 Web Summit 上挑战大师
任何渴望参与这一历史性活动的人都可以加入世界队,通过自己的设备实时在线玩游戏。由 it.com Domains 设计并基于 Stockfish AI 引擎的 AI 顾问系统将为参与者提供每个动作的三个选项,模拟不同的游戏级别——大师级、高级和业余。参与者将不知道哪个动作对应哪个级别。投票时间为 30 秒,最受欢迎的选项将成为世界队的官方动作。实时投票分布将显示在网站上。汉斯·尼曼则总共有 5 分钟的时间来下棋。

凝结物理物理。pdf
单元I:使用矢量代数和矢量计算,粒子和系统的颗粒和刚体的力学(15),转换定律,工作能源定理,开放系统(具有可变质量),陀螺力;陀螺力;耗散系统,雅各比积分,仪表不变性,运动积分;时空与保护法的对称性;伽利略转变下的不变性。II II单元:在中央力量(15)下的拉格朗日制定和运动约束,广义坐标,d Alemaberts原理,拉格朗格运动方程,中央力量,定义和特征,将两个实力的问题减少到等效的一体问题,Orbits的一般分析,对Orbits的一般分析,合并者法律和方程式,合并器和方程式,成员卫星,人工statellites,Artahring Forder,stroverford,scterterford,scterterford,rutherford,rutherford。 单元III:变异原理(15)变异的计算简介,许多自变量的变异技术,Eulers Lagrange微分方程,汉密尔顿的原理,扣除限制汉密尔顿原理的运动方程。 汉密尔顿,广义动量,运动常数,汉密尔顿的运动概念方程,从变化原理中扣除规范方程。 汉密尔顿运动方程的应用,最少动作的原则,最少行动的原则证明,问题。 单元IV:规范转换和汉密尔顿的 - 雅各比理论(15)II II单元:在中央力量(15)下的拉格朗日制定和运动约束,广义坐标,d Alemaberts原理,拉格朗格运动方程,中央力量,定义和特征,将两个实力的问题减少到等效的一体问题,Orbits的一般分析,对Orbits的一般分析,合并者法律和方程式,合并器和方程式,成员卫星,人工statellites,Artahring Forder,stroverford,scterterford,scterterford,rutherford,rutherford。单元III:变异原理(15)变异的计算简介,许多自变量的变异技术,Eulers Lagrange微分方程,汉密尔顿的原理,扣除限制汉密尔顿原理的运动方程。 汉密尔顿,广义动量,运动常数,汉密尔顿的运动概念方程,从变化原理中扣除规范方程。 汉密尔顿运动方程的应用,最少动作的原则,最少行动的原则证明,问题。 单元IV:规范转换和汉密尔顿的 - 雅各比理论(15)单元III:变异原理(15)变异的计算简介,许多自变量的变异技术,Eulers Lagrange微分方程,汉密尔顿的原理,扣除限制汉密尔顿原理的运动方程。汉密尔顿,广义动量,运动常数,汉密尔顿的运动概念方程,从变化原理中扣除规范方程。汉密尔顿运动方程的应用,最少动作的原则,最少行动的原则证明,问题。单元IV:规范转换和汉密尔顿的 - 雅各比理论(15)