XiaoMi-AI文件搜索系统
World File Search System动量

主题:监管资本规则:大型银行机构和交易活动量较大的银行机构(案卷编号 OCC-2023-0008,
大型银行资本金提案和 GSIB 附加费提案都解决了大型银行资本不足的长期问题,并将使金融系统更安全,免受金融危机和由此导致的金融动荡的影响,这些动荡会使家庭和企业的金融安全面临风险。这些提案将通过要求大型银行为其实际风险承担持有更多资本来实现这一点。这些提案将减少收益私有化和损失社会化风险,这些风险会激励大型银行承担过大的风险,否则这些银行可以从投机活动中增加利润,然后在出现问题时依靠公共救助。银行——尤其是最大的“大而不能倒”的银行——将适当地承担更多持有足够资本缓冲的重担和责任。

ATI研究日2024 |艾伯塔省移植学院 dom Research&Qi 2024小册子 一起建立动量
The formation of an ATI Advocacy Committee (Chair: Dr. Rhea Varughese) was a welcome new addition to our activities in support of our partners across Alberta who are also allies in k eepin g both re search and ed ucat ion reg ard ing d ona tion an d t rans plant ati on out i n the publ ic eye.在G Reen衬衫上的演讲,她的活动s,并创建一个讨论新兴机会的桌子都是他们周一的优先事项的一部分。可以在ATI网站的新页面上找到我们所有合作伙伴的机构和联系信息:link。此外,ATI还创建了一个新的ATI活动日历,该日历将不仅强调自己的研讨会/活动,还会强调CDTRP,相关的国家/国际会议以及我们艾伯塔省合作伙伴的所有社区推广和筹款活动。我们邀请您全部检查它们,请提交任何相关和相关的活动,以添加到transplant@ualberta.ca!我们的几个合作伙伴组织还将在研究日的门厅中设置信息表,因此请花点时间介绍自己,并了解艾伯塔省正在进行的惊人工作的广度!

在门诊精神卫生诊所实施异常的非自愿运动量表
这项护理实践医生最终手稿由Digital of Digital Cusd的护理与健康科学学院免费提供给您。已被数字USD的授权管理人纳入护理医生的最终手稿。有关更多信息,请联系digital@sandiego.edu。

可视化石墨烯中轨道角动量引起的单个波前脱位
相奇异性是波幅度为零的相位划分点,表现为相位顶点或波前位错。在光学和电子束的领域中,已经广泛探索了相位奇异性,证明了与轨道角度膜的密切联系。直接对轨道角动量对纳米级奇异性的影响的直接局部成像仍然具有挑战性。在这里,我们通过扫描隧道显微镜和光谱研究来研究轨道角动量在石墨烯中,尤其是在原子水平上的相位奇异性中的作用。我们的实验表明,由局部旋转对称性势能引起的不同轨道角动量状态之间的散射可以产生额外的相位单位,并在真实空间中导致稳健的单波偏位。我们的结果为探索轨道自由度对准粒子干扰过程中量子相的影响铺平了道路。

旋转角动量的光子准晶体
摘要 - 班迪斯作为序列学习的理论基础,也是现代收获系统的算法基础。但是,推荐系统通常依赖于用户敏感的数据,从而使隐私成为关键问题。本文有助于理解具有可信赖的集中决策者的土匪的差异隐私(DP),尤其是确保零集中差异隐私(ZCDP)的含义。首先,我们根据考虑的输入和相互作用协议进行形式化和比较DP的不同适应性。然后,我们提出了三种私人算法,即ADAC-UCB,ADAC-GOPE和ADAC-OFUL,用于三个土匪设置,即有限的武装匪徒,线性匪徒和线性上下文匪徒。三种算法共享一个通用算法蓝图,即高斯机制和自适应发作,以确保良好的隐私 - 实用性权衡。我们分析并限制了这三种算法的遗憾。我们的分析表明,在所有这些环境中,与遗憾的遗憾相比,强加了ZCDP的价格(渐近)可以忽略不计。接下来,我们将遗憾的上限与第一个Minimax下界补充了与ZCDP的匪徒的遗憾。为了证明下限,我们阐述了一种基于耦合和最佳运输的新证明技术。我们通过实验验证三种不同的匪徒设置的理论结果来得出结论。索引术语 - 差异隐私,多军匪徒,重新分析,下限

轨道轨道的非平衡轨道角动量
电流流动的附加导体。在2000年代提出了通过将自旋式电子注射到FM中,提出了通过电流来操纵电流的磁化的想法(图1C)[2]。注入的旋转与磁化相互作用,最终,传出的电子将获取FM的自旋偏振。由于总角动量是保守的,因此进出状态的旋转的差异意味着磁化强度必须经历扭矩作为背部动作。相应的过程称为自旋扭矩,它可以通过电流进行有效的磁化操作。GMR和自旋扭矩是旋转记忆设备(例如磁随机存储器(MRAM))背后的关键机制,它可以用作内存和神经形态计算设备以及存储式内存的可靠硬件。

越南农村水和卫生部门的循环经济:充分利用当前动量
循环经济的思想对越南并不陌生,并且是通过诸如Vuon-ao-chuong(VAC)传统农业系统等倡议来实施的,这些耕作系统将园艺,养鱼和畜牧业整合在一起。但是,总理的决定是有限的机构框架 - 强调了多个部门循环经济的经济利益 - 打算解决。该指令已经引发了一系列的机构努力,包括修订的环境保护法(LEP),2020年(2022年修订),该法规广泛强调了各部委和地方当局将循环经济原则纳入其计划策略和发展计划的原则,以及即将实现循环经济行动计划。
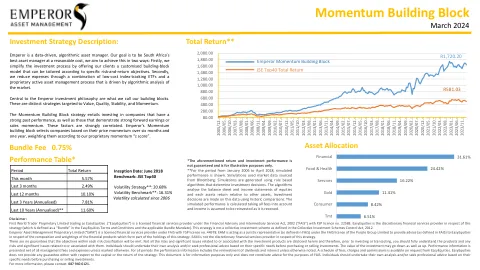
动量构建块
免责声明:第一贸易商专有有限交易作为EasyEquities(“ EasyEquities”)是2002年的《金融咨询和中介服务法》(FAS)签证的持牌金融服务提供商,并具有FSP许可证号。22588。EasyEquities是该策略的酌处金融服务提供商(在EasyEquities条款和条件以及适用的捆绑授权下定义为“捆绑”)。该策略不是2012年《集体投资计划法》中定义的集体投资计划。皇帝资产管理专有有限公司(“ EAM”)是一家持牌金融服务提供商,该服务提供商具有FSP许可证号。44978。eam在紫色集团有限公司的FAIS许可下充当法学代表(如FAI所定义),以在构成本策略持有的一部分的金融产品的组成和权重方面向EasyEquities提供建议(如FAIS所定义)。eam不是此策略的酌处金融服务提供商。不能保证将实现每个风险分类中的目标。并非所有与投资产品相关或与投资产品相关的重大问题和重大问题都在此处披露,因此,在投资或交易之前,您应该完全了解产品以及与它们相关或与之相关的任何风险和重大问题。个人应在购买或出售投资之前根据其特定需求进行自己的分析和/或寻求专业建议。投资的价值可能会下降和上升。绩效信息将提供所有管理费和费用的网络,除非另有标记。在所有时期,绩效信息包括对股息和利息的再投资,除非另有说明。可根据EasyEquities的要求获得费用,费用和佣金的时间表。EasyEquities在资本或策略返回方面都不提供任何保证。本文档仅出于信息目的,并且不构成FAIS目的的建议。个人应在购买或出售投资之前根据其特定需求进行自己的分析和/或寻求专业建议。有关更多信息,请联系087 940 6121。

异常非自愿运动量表(AIMS) - Able Colorado
降低阿吡唑抗抑郁药右旋苯丙胺和苯丙胺治疗ADHD CELEXA CETEREXA Citalopram抗抑郁药氯氮胺氯氮骨氯氮宾抗氯唑替合作促氯吡啶甲基植物alleatee抗精神病患者抗精神病药抗精神病药,抗精神病药, ADHD Depakote丙丙酸双极D/O-脱氧军脱氧右苯丙胺治疗ADHD Duo -Duo -Vil amitriptyline和Perphenazine抗磷酸effexor effexor venlafaxine抗抑郁药抗抗酸剂的抗精神抗磷酸酯类的抗磷脂剂量,抗精神病药fazaclo氯氮蛋白抗精神病药脱甲甲酯治疗ADHD地球扎二甲酯治疗)抗精神病药抗抑郁剂抗抑郁药锂治疗双极D/O氯糖烷Loxapine抗精神病药甲状腺素抗氯替嗪抗氯替嗪甲基甲酯治疗ADHD抗抑郁药

动量能源 - AEMC
2024 年 4 月 3 日 澳大利亚能源市场委员会 15 楼,60 Castlereagh St Sydney NSW 2000 Elizabeth Street Sydney NSW, 2000 通过在线提交:www.aemc.gov.au 参考 RPR0016 尊敬的先生/女士 澳大利亚能源市场委员会 (AEMC) 对失败零售商电力和天然气合同安排的审查(草案报告) 感谢您提供机会提交对 AEMC 草案报告的意见。 Momentum Energy Pty Ltd(“Momentum”、“我们的”或“我们”)是一家澳大利亚运营的能源零售商,由澳大利亚最大的可再生能源发电机 Hydro Tasmania 所有。我们为维多利亚州、新南威尔士州、南澳大利亚州、昆士兰州、澳大利亚首都领地和巴斯海峡群岛的电力消费者提供有竞争力的价格、创新和出色的客户服务而感到自豪。我们还向维多利亚州的客户零售天然气。此回复反映了 Momentum 和 Hydro Tasmania 的观点。