XiaoMi-AI文件搜索系统
World File Search System匹托芬

丹尼尔·托托里斯
教育背景 经济学博士,哈佛大学,2008 年 6 月 论文:“宏观经济模型中的失业和预期” 经济学硕士,哈佛大学,2005 年 11 月 经济学学士学位,麻省理工学院,2002 年 6 月 数学学士学位,麻省理工学院,2002 年 6 月 学术就业 2021 - 经济学副教授(终身教授),圣十字学院,经济学与会计系 2017 – 2021 经济学助理教授,圣十字学院,经济学与会计系。 2008-2017 布兰迪斯大学经济学系与国际商学院经济学助理教授 同行评审出版物 “阿尔茨海默病和其他痴呆症的全球宏观经济负担:对 152 个国家或地区的估计和预测”(与 S. Chen、Z. Cao、A.Nandi、N. Counts、L. Jiao、K. Prettner、M. Kuhn、B. Seligman、D. Vido、C. Wang 和 D. Bloom 合作),《柳叶刀全球健康》,第 12 卷,第 9 期,2024 年 9 月。 “扩大卫生研究与开发的经济案例:从 COVID-19 大流行中吸取的教训”,(与 R. Rappuoli 和 D. Bloom 合作),《美国国家科学院院刊》(PNAS),第 121 卷,第 26 期,2024 年 6 月。 “有效的健康援助:来自“全球疫苗和免疫联盟疫苗计划”(与 Gauri Kartini Shastry 合作),AEJ:经济政策,有条件接受,2024 年 1 月 “美国阿尔茨海默病和相关痴呆症的护理成本:2016 年至 2060 年”(与 A. Nandi、N. Counts、J. Broker、S. Malik、S. Chen、R. Han、J. Klusty、B. Seligman、D. Vigo、D. Bloom 合作),npj:老龄化,已接受,2024 年 1 月
将5G连接的车辆匹配到感知...
5G连接的自动驾驶汽车(CAVS)通过共享感应和驱动信息来帮助增强对车辆驾驶环境和合作的看法,这是一项有希望的技术,旨在避免事故并提高道路使用效率。骑士之间合作的关键问题是将通信车辆与摄像机,LIDAR等传感器捕获的车辆相匹配。不正确的车辆匹配可能会导致严重事故。虽然现在可以适用于自动驾驶汽车的厘米水平定位,但将连接的车辆匹配到感知的车辆(MCSV)仍然具有挑战性,并且很少研究。在本文中,我们有动力研究5G骑士的MCSV问题,提出和评估解决方案以弥合研究差距的解决方案。我们提出了MCSV问题,并提出了两种支持合作驾驶的MCSV方法。第一种方法是基于车辆注册号(VRN),它是识别车辆的独特之处,可以在MCSV的CAVS中共享。vrn在共享之前进行了悬浮,以保护隐私,并将与共享的车辆匹配相提并论。第二种MCSV方法基于车辆外部视图的视觉特征,该视觉特征与其他骑士共享,并将其与从视觉传感器获得以匹配感兴趣的车辆的骑士相比。开发了一个新的MCSV数据集来评估所提出方法的有效性。实验结果表明,两种方法都是可行且有用的,它们的假阳性速率非常低,这对于合作驾驶安全至关重要。

年度报告 - 艾芬集团
他的职业生涯始于担任外交和行政官员,隶属于总理府和公共企业部。在总理府任职期间,他还被任命为政府特别经济顾问助理。他曾担任福隆港开发公司、霹雳州、彭亨州和登嘉楼州开发公司的董事会成员,以及马来西亚发展银行有限公司、马来西亚经济综合公司、HICOM 和人民信托理事会 (MARA) 的董事会成员。在政府部门工作十三年后,他离开公职,加入一家从事国际业务的政府关联公司,之后他独自创业,担任保险经纪公司的董事总经理。此后,他还涉足证券业和资产管理活动。他还曾担任 Hitachi Sales (Malaysia) Sdn Bhd、Meiden Electric Engineering Sdn Bhd、Far East Computers (India) 和 Affin Discount Berhad 的董事。他还在一般贸易、发电和输电、飞机维修以及石油和天然气服务领域拥有丰富的经验。


芬湖海洋生物安全计划
非本土和入侵非本土物种 非本土物种是从世界其他地方引进的植物和动物。当非本土物种蓬勃发展时,就会对当地的生态和经济造成问题,这时就被称为“入侵物种”。一些非本土物种被意外地从其本土范围移出,例如在船体上、压载水中或通过货物和材料的运输。一些物种被故意释放用于食物或运动(兔子)或园艺,例如杜鹃花(R. ponticum)等园林植物。物种在定居之前可能已被多次引进。与入侵非本土物种相关的问题 入侵非本土物种 (INNS) 通常比本土物种更具优势,它们适应性更强,并且摆脱了本土捕食者和疾病。这意味着它们通常可以快速生长,在食物、空间和光照方面超过本土物种。它们会扼杀本地物种和栖息地,如鱼类繁殖地,从而破坏整个生态系统。它们还会堵塞并可能损坏重要的基础设施,如陆地上的道路和建筑物或水域进水口、鱼笼、螺旋桨和海洋环境中的船闸。INNS 被认为是生物多样性的最大威胁之一,环境、食品和乡村事务部 1 估计,它们每年给英国经济造成至少 20 亿英镑的损失,其中超过 2.44 亿英镑花在了苏格兰。苏格兰关于 INNS 的生物安全法是英国最先进的。2011 年《野生动植物和自然环境(苏格兰)法案》2 包括《非本地物种行为准则》3,有助于解释该立法的影响。该法案涉及植物和动物,不区分入侵物种或非本地物种,并规定以下行为属于严格责任犯罪:

南托托声学测量设施 (STAFAC)
美国海军在巴哈马群岛海舌南部 (TOTO) 运行的潜艇辐射噪声测量系统已接近使用寿命,需要在 2009 财年之前更换。这项为期四年的项目从 2005 财年开始,将在同一区域安装固定、底部安装、与岸上连接的声学系统,以取代现有的水面舰艇部署的潜艇辐射噪声高增益测量系统。主要系统基础设施安装于 2008 年 4 月至 5 月,声学传感器安装于 2008 年 7 月至 8 月。STAFAC 的初始作战能力 (IOC) 为 2008 年 10 月。机械、系泊和安装 (MMI) 综合项目团队由来自罗德岛州纽波特的海军水下作战中心 (NUWC)、加利福尼亚州波特休尼米的海军设施工程服务中心 (NFESC) 和加利福尼亚州文图拉的声音与海洋技术 (SST) 的人员组成,负责设计、制造 STAFAC 系统的机械部件,并安装整个 STAFAC 系统,包括位于巴哈马安德罗斯岛 AUTEC 的 MMI 和阵列部件。STAFAC 系统的配置如右图所示。STAFAC 水下机械系统包括所有底部安装的遥测和电缆、深海系泊设备以及纳入 AUTEC 陆地和海上站点的相关机械子系统。这些包括海底电力和遥测电缆、电光机械终端;遥测和电力转换接线盒的浅水安装结构;仪器压力容器;
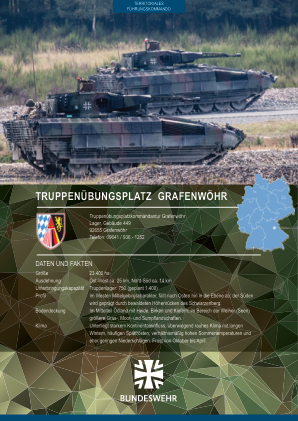
格拉芬沃尔部队训练区
1956 年 7 月,第一批德国联邦国防军成员抵达后仅两天,新德国武装部队的雇员就被美国指挥部驱逐出现场。原因是,德国联邦国防军并未正式下令进驻军事训练区。尽管起步并不顺利,但位于格拉芬沃尔的德国联邦国防军办事处很快发展成为美国人的可靠合作伙伴和训练区的永久共同用户。16日7月,德国联邦国防军以“联邦国防部长-格拉芬沃尔行政办公室”的名义首次出现在训练场。随着德国重新实行征兵制以及在安德纳赫成立新的联邦国防军,格拉芬沃尔训练区也被纳入全面改组后的德国武装部队的概念中。为了在格拉芬沃尔执行任务,第一批人员被分配到完全被忽视的 449 号建筑物,仅两天后他们就必须再次腾出这栋建筑物。该部门暂时在 Micky Bar 对面的私人 Hausmann 地产中找到了住处。行政官员最重要的任务是最初雇用来自该地区的第一批文职雇员。3号8月15日,小卫戍部队司令部指挥官沃纳·冯·德滕 (Werner von Detten) 少校和两名中士抵达格拉芬沃尔。随后,449号楼最终投入使用,并开始全面服务运营。

芬顿市 - 纽约和视图
在这里的冬季天气下,我们希望您在降雪紧急情况下进行合作和协助。媒体宣布降雪咨询,或者雪开始下降时,请消除道路上的任何障碍物,并避免街上的停车车。这在Cul-De-Sac和街道狭窄的地区尤其重要。任何阻碍降落设备的任何事情都可能导致警察局立即通知,无论小时如何,都会移动车辆或其他障碍。除了城市的船员,居民和企业社区外,恶劣的天气袭来发挥了关键作用。,商业房东/所有者的责任是在不将材料存放在城市拥有的通行权中的情况下,提供停车场和私人街道的降雪。此外,每个家庭都有责任从自己的车道,邮箱和固体废物容器中提供降雪。

约翰内斯·M·芬克
5. 微波双模压缩和量子照明(受邀网络演讲),JM Fink。美国马里兰州帕克分校马里兰大学情报与安全应用研究实验室 (ARLIS) 量子雷达研讨会,2020 年 7 月 15 日至 16 日 6. 从机械纠缠产生到微波量子照明(受邀网络研讨会),JM Fink。3. 斯图加特大学物理研究所,2020 年 7 月 7 日 7. 微波量子技术:光接口和量子照明(受邀网络研讨会),JM Fink。捷克奥洛穆茨帕拉茨基大学光学系,2020 年 5 月 26 日 8. 微波与电信光之间的芯片级光机转换(受邀演讲),JM Fink。量子微机械系统会议,奥地利奥伯古格尔,2020 年 2 月 10 日至 14 日 9. 微波与电信光之间的芯片级辐射压力介导转导(特邀演讲),JM Fink。OMT – HOT 2020 年度会议,瑞士格施塔德 – 萨嫩,2020 年 1 月 19 日至 23 日 10. 利用硅纳米梁振荡器进行转导和纠缠生成(会议演讲),JM

实时签名 - 芬格 - 诉说 -
摘要:手语允许静音人交流,当对话主义者无法理解时,就会出现问题。尽管努力解决了这个问题,但尚未找到有效的解决方案。在这项工作中,卷积神经网络(CNN)在两个不同的数据集上进行了培训 - 二进制和红色蓝色绿色)RGB(每个都包含25,900张尼日利亚手语的图像。使用深度神经预训练的模块来检测视频供稿中的手势,该模块解决了复杂背景的问题,在昏暗的区域也显示出极好的检测。在培训和验证集中分别获得了(98.95%,76%)和(98.87%,98.85%)的精度。开发的实时系统将这两个模型作为单个系统实现,这使其成为独特的系统。