XiaoMi-AI文件搜索系统
World File Search System卡昂

Affordance - 诺曼底卡昂大学
摘要。可供性的概念是感知和行动的生态方法的支柱之一。它于 20 世纪 80 年代末在设计界流行起来,对人体工程学产生了巨大影响,主要是在人机界面 (HMI) 设计领域。我们回到可供性的概念,更具体地回到可供性的表征,它基于对个体固有的统一环境的描述,也就是说参考他的身体或其行动系统。在简要提醒一些基本原则和概念的定义之后,我们通过有关可供性文献的一些主要结果,详细介绍了经典地用于表征可供性的形式主义,直到其最近的发展。最后,我们讨论了功能可供性的概念及其在人体工程学中的形式主义所提供的远超出 HMI 的视角。

LFRK - 卡昂卡尔皮凯 - dircam
可用设施和设备 22.3.1 RWY 31 配备: 跑道 31 配备: - - 仅 ILS CAT 1, - - 由单向白灯组成的 420 米 HI 进近坡道。一条长 420 米、由单向白灯组成的进场坡道 LIH。 RWY 13 未配备 ILS 或进近坡道。 13 号跑道未配备 ILS 或进近坡道。车道 22.3.2 交通车道 22.3.2 在低速车道 (LVP) 条件下: 在低速车道 (LVP) 下: - 可用的车道:A1。 - 可用车道:A1。可用的握持点:A1。 - 可用跑道前的等待点:A1。通讯 22.3.3 通讯 22.3.3 当 LVP 程序生效时,飞行员会通过 ATIS 收到通知。当 LVP 程序生效时,ATIS 会通知飞行员。 LVP 实施和结束标准 22.3.4 当能见度在 550 米至 400 米之间或云层 < 200 英尺时,LVP 有效。当能见度在 550 米至 400 米之间或云层高度小于 200 英尺时,LVP 有效。 LVP 持续有效,直到标准(RVR 和云层高度)被大幅超越。 LVP 持续有效,直到触发 LVP 的标准(RVR 和云层高度)被大幅超越为止。 - 抵达时无 LVP。 - 抵达时无 LVP。 - 在机动区域内,流通范围仅限于单个移动设备。 - 整个机动区域内仅限一辆车通行。照明 22.3.5 标志 22.3.5 RWY 标志:白天地面标志 - 跑道和转弯区域的边缘照明 - THR LIH。跑道标记:通过标记(白天) - 跑道上的侧灯和折返灯 - HI 中的阈值。其他照明:等待点 A1 的 RWY 保护灯 (Wig-Wag) - 义务面板 - TWY A1 边缘照明。其他照明:A1 跑道前等待点的跑道保护灯 (Wig-Wag) - 强制性标志 - TWY A1 侧灯。

昂德集团
2.9 管理与集团活动相关的风险 32 2.9.1 管理人员流失的风险 32 2.9.2 与员工相关的集团稳健发展风险 32 2.9.3 与职业健康与安全相关的风险 32 2.9.4 与可能的负面环境影响相关的风险 33 2.9.5 与对气候的潜在负面影响以及气候变化对集团的影响相关的风险 33 2.9.6 与潜在的歧视和聚众滋事案件相关的风险 35 2.9.7 与社会抗议相关的风险 35 2.9.8 与形象危机相关的风险 36 2.9.9 与可能发生的腐败事件相关的风险 36 2.9.10 与承包商可能违反 ESG 领域的规定相关的风险 36 2.9.11 与结构和众多公司股东变动情况 36
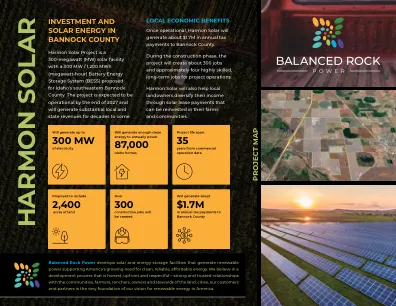
德克萨斯州莱昂县
。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 1. 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 2. 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 4. 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 8. 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 12. 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 14. 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 16. 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 22. 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 24. 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 31. 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 32
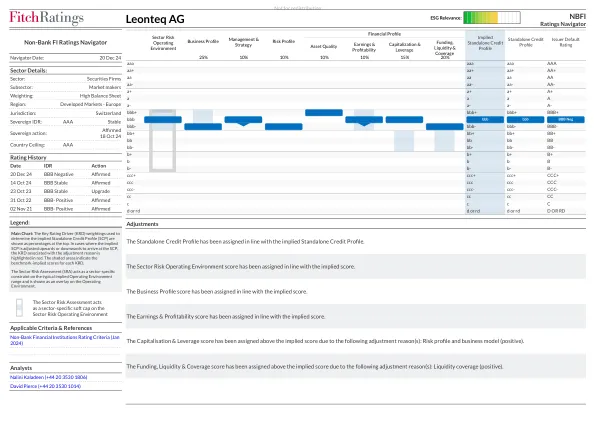
莱昂特克公司
所有惠誉评级(惠誉)信用评级均受某些限制和免责声明的约束。请通过以下链接阅读这些限制和免责声明:https://www.fitchratings.com/understandingcreditratings。此外,以下https://www.fitchratings.com/rating-definitions-document详细说明了惠誉对每个评级量表和评级类别的评级定义,包括与违约相关的定义。已发布的评级、标准和方法可随时从本网站获取。惠誉的行为准则、保密性、利益冲突、关联方防火墙、合规性和其他相关政策和程序也可从本网站的行为准则部分获取。董事和股东的相关利益可在https://www.fitchratings.com/site/regulatory上找到。惠誉可能已向受评实体或其相关第三方提供了其他允许或辅助服务。有关主分析师所在的 ESMA 或 FCA 注册的惠誉评级公司(或该公司的分支机构)的许可或辅助服务的详细信息,可在惠誉评级网站上该发行人的实体摘要页面上找到。