XiaoMi-AI文件搜索系统
World File Search System参考系

用于低雷诺流应用的空气动力和力矩平衡设计、制造和测试
图 1-1:RIT 的风洞测试第 3 部分图 1-2:RIT 的闭路风洞图 5 图 2-1:用于测量三维流体动力的实验仪器。 (Sunada 等 [5]) 6 图 2-2:实验研究中使用的天平示意图 [3] 8 图 3-1:风轴参考系 14 图 3-2:体轴参考系 15 图 3-3:升力和阻力天平的装配图 16 图 3-4:用于测量升力的天平配置 17 图 3-5:用于测量阻力的天平配置 17 图 3-6:力矩分析图 - 升力配置 22 图 3-7:阻力天平配置的力矩分析图 23 图 3-8:俯仰和滚转力矩天平的装配图 24 图 3-9:俯仰和滚转力矩天平的测试平台装配图 25 图 3-10:装配式焊条测试平台 26 图 3-11:俯仰力矩天平配置 28 图 3-12:滚动力矩天平配置 28 图3-13: 俯仰力矩分析图 29 图 3-14: 滚转力矩分析图 30 图 4-1: 实验元素图 34 图 4-2: 升力配置 36 图 4-3: 阻力配置 36 图 4-4: 俯仰力矩配置 38 图 4-5: 滚转力矩配置 38 图 4-6: 平板力矩校准图(零速度且无翼型) 40 图 4-7: 平板俯仰力矩数据 40 图 4-8: 俯仰实验测试平台设置 42 图 4-9: LinAir 涡流面板法翼型 44 图 4-10: 二面角和滚转力矩系数 45 图 5-1: 升力和系数的实验值 53 图 5-2: 实验升力数据与已发布数据的比较 55 图 5-3: 实验阻力数据 56 图5-4:实验阻力数据与公布数据的比较 57 图 5-5:实验俯仰力矩数据 58 图 5-6:俯仰力矩实验值和公布值 60 图 5-7:实验数据;滚动力矩 61 图 5-9:滚动力矩系数与分析模型的比较 62 图 7-1:附加质量的平衡设计 68

使用飞行试验中的惯性导航系统数据确定攻角
图 1:NACA 空中数据臂设计,在 UTSI Cessna 210 右翼尖配备流动角叶片。 .............................................. 1 图 2:惯性(东北向下)坐标系。来源:USAF TPS [6]。 .............................................................................. 5 图 3:机身固定坐标系。来源:USAF TPS [6]。 ............................................................................................. 6 图 4:流动角参考系。u、v、w 分别是机身固定参考系上 x、y、z 方向的速度矢量。来源:NASA [9] ......................................................................................................... 8 图 5:X-Z 轴上的攻角、俯仰角和飞行路径角视图。来源:波音航空杂志 [11]。 ... 9 图 6:不同情况下攻角和俯仰角的差异 [12]。 ............................................................................. 9 图 7:由于升力要求,平飞中的攻角会发生变化 [12]。 ................................................................ 9 图 8:估算 Oswald 效率因子的方法。来源:Roskam [15]。 .............................................................. 16 图 9:阻力系数随马赫数变化的典型变化。来源:Kroo [16]。 .............................................................. 18 图 10:烟气风洞试验中机翼上方的上洗流。来源:Babinksy [17]。 ..............................................................

加速框架中量子波包的断层扫描描述
摘要:研究加速框架中单个量子粒子(即量子波包)的层析成像。我们在移动参考系中写出薛定谔方程,其中加速度在空间中均匀分布,并且是时间的任意函数。然后,我们将这个问题归结为在存在均匀力场但具有任意时间依赖性的情况下,惯性框架中波包的时空演化研究。我们证明了高斯波包解的存在,其中位置和动量不确定性不受均匀力场的影响。这意味着,与无力运动的情况类似,不确定性乘积不受加速度的影响。此外,根据埃伦费斯特定理,波包质心根据粒子受到均匀加速度影响的经典牛顿定律移动。此外,与自由运动一样,波包在配置空间中表现出衍射扩散,但在动量空间中则没有。然后利用Radon变换确定加速框架中高斯态演化的量子断层扫描图,最后利用相关断层扫描空间中的光学和单纯形断层扫描图演化来表征加速框架中的波包演化。

超正态空间中的量子共形对称性
在没有完整的量子引力理论的情况下,量子场和量子粒子在时空叠加中的行为问题似乎超出了理论和实验研究的范围。在这里,我们使用量子参考系形式主义的扩展来解决位于共形等价度量叠加上的克莱因-戈登场的这个问题。基于“量子共形变换”的群结构,我们构造了一个显式量子算子,它可以将描述时空叠加上的量子场的状态映射到表示闵可夫斯基背景上质量叠加的量子场的状态。这构成了一个扩展的对称性原理,即量子共形变换下的不变性。后者允许通过将微分同胚非等价时空的叠加与弯曲时空上更直观的量子场叠加联系起来,建立对微分同胚非等价时空的叠加的理解。此外,它可以用于将弯曲时空中的粒子产生现象导入到其共形等价对应部分,从而揭示具有修正克莱因-戈登质量的闵可夫斯基时空的新特征。
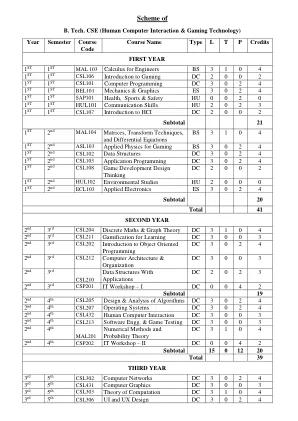
B. Tech. CSE(人机交互与游戏...
课程内容: 模块 1:基本概念 游戏物理 – 游戏引擎(简介)- 物理真实感 – 在游戏中的重要性、物理概念和游戏性能、基础知识 – 坐标系和参考系、标量和矢量、计算矢量大小、矢量叉积、矩阵 – 乘法和旋转、导数。 模块 2:基本牛顿力学和运动学 牛顿三运动定律 – 惯性 – 力 – 质量 – 加速度相等和相反的力、力矢量、力的类型 – 引力 – 摩擦力 – 向心力 – 力平衡和图表、功、能量 – 动能 – 势能 – 守恒 – 功率、平移运动 – 运动方程、旋转运动 - 扭矩 – 角加速度、2D 粒子运动学、3D 粒子运动学、刚体动力学。模块 3:抛射物抛射物属性、简单轨迹和重力、阻力、马格努斯效应 - 抛射物的旋转效应、游戏中的特定抛射物类型 - 炮弹 - 子弹 - 箭、可变质量。模块 4:碰撞:冲量和动量原理 - 线性和角冲量、弹性和非弹性碰撞冲击、恢复系数、碰撞方向和检测、与可移动和不可移动物体的碰撞、与摩擦的碰撞、2D 和 3D 碰撞、游戏应用。模块 5:物理建模:游戏车辆的物理学(飞机、轮船和小船、汽车和气垫船、枪支和爆炸、运动)教科书:1. 游戏程序员的物理学,

3.1 光速对所有观察者来说都是 c 3.2 后果 I
在接下来的几周里,我们将要学习的大部分内容将归结为对爱因斯坦假设的后果的详细研究,即所有观察者都测量出光速为 c 。因此,光速是一个不变量——对于所有观察者、所有参考系来说,它都是相同的。希望您在本学期的课程中能够意识到,不变量非常有用:我们可以利用它们对于所有观察者都相同的事实来促进我们想要执行的许多分析。光速的不变性告诉我们,光在单位时间内传播的距离对于所有观察者来说都是相同的。在伽利略变换中,我们看到位移,以及事件之间的距离,会根据帧而变化。因此,速度(单位时间的距离)也必须变化。因此,伽利略变换与光速对于所有观察者都相同的观点不一致:必须对其进行修正。如果位移随观察者的坐标系而变化,而某物的速度不变,那么我们必须发现时间间隔随坐标系而变化。只有允许时间间隔随坐标系而变化,速度(单位时间间隔的位移间隔)才能保持不变。但值得注意的是,伽利略变换在许多情况下都非常有效,因此它近似正确。我们的“广义”变换定律必须在某些适当的极限下与伽利略定律一致。另外:光速的不变性也意味着它可以作为计量标准的一个很好的基础。这就是为什么我们取 c 正好是 2.99792458 × 108 米/秒。然后我们将米确定为光在 1/(2.99792458 × 108)秒内传播的距离。原子物理学技术教会我们如何非常精确地测量时间间隔,因此这是一种利用仪表来充分利用我们最擅长的测量方法。
埃塞俄比亚的绝对位势高度系统 - ERA
3.7 计算精度................................................................................................ 87 3.7.1 连续效应.................................................................................... 87 3.8 总结.............................................................................................................. 90 4 斯托克斯积分与 FFT 91 4.1 简介................................................................................................ 91 4.2 类斯托克斯积分变换...................................................................................... 93 4.3 确定性方法............................................................................................. 95 4.4 核属性............................................................................................. 96 4.5 随机方法............................................................................................. 98 4.5.1 重力功率谱与自相关函数............................................................. 99 4.6 随机重力模型与斯托克斯积分............................................................. 104 4.6.1 环平均重力的期望值 ) ( ψ g ∆ ............ 104 4.6.2 不同的4.6.3 内核的不同部分............................................................................... 108 4.7 在有限区域上计算的大地测量内核的傅里叶变换 108 4.8 总结.............................................................................................. 113 5 地球位势垂直参考系统 114 5.1 简介......................................................................................................... 114 5.2 地球位势计算原理.................................................................................... 116 5.3 水平测量......................................................................................................... 117 5.4 新高度系统......................................................................................................... 119 5.5 为什么我们需要物理高度系统?......................................................................... 121 5.6 我们如何绘制空间中的水平表面? ................................................ 122 5.7 统一垂直参考系的标准............................................................... 124 5.7.1 潮汐系统............................................................................... 125 5.8 计算重力位能模型............................................................... 130 5.8.1 第一阶段重力场建模....................................................... 130 5.8.2 第二阶段向下延续与变换..................................................... 131 5.8.3 第三阶段向上延续与恢复重力位能.................................... 132 5.9 EGM08 与航空重力及 SRTM 改正值的比较.................................... 132 5.10 与水准测量的比较.................................................................... 139 5.11 结论................................................................................................ 144 6 讨论 145 6.1 垂直参考系统............................................................................... 145 6.2 计算概述............................................................................................... 147 6.3 空间域重力预处理....................................................................... 148 6.3.1 地形重力处理....................................................................... 149 6.3.2 重力模型验证和确认.................................................... 150 6.4 谱域重力处理.................................................................................... 152 6.5 斯托克斯积分的局部化.................................................................................... 154 6.6 未来工作.................................................................................................... 156 几何地形的重力模型.................................................................... 158 参考文献 159
埃塞俄比亚的绝对位势高度系统 - ERA
3.7 计算精度................................................................................................ 87 3.7.1 连续效应.................................................................................... 87 3.8 总结.............................................................................................................. 90 4 斯托克斯积分与 FFT 91 4.1 简介................................................................................................ 91 4.2 类斯托克斯积分变换...................................................................................... 93 4.3 确定性方法............................................................................................. 95 4.4 核属性............................................................................................. 96 4.5 随机方法............................................................................................. 98 4.5.1 重力功率谱与自相关函数............................................................. 99 4.6 随机重力模型与斯托克斯积分............................................................. 104 4.6.1 环平均重力的期望值 ) ( ψ g ∆ ............ 104 4.6.2 不同的4.6.3 内核的不同部分............................................................................... 108 4.7 在有限区域上计算的大地测量内核的傅里叶变换 108 4.8 总结.............................................................................................. 113 5 地球位势垂直参考系统 114 5.1 简介......................................................................................................... 114 5.2 地球位势计算原理.................................................................................... 116 5.3 水平测量......................................................................................................... 117 5.4 新高度系统......................................................................................................... 119 5.5 为什么我们需要物理高度系统?......................................................................... 121 5.6 我们如何绘制空间中的水平表面? ................................................ 122 5.7 统一垂直参考系的标准............................................................... 124 5.7.1 潮汐系统............................................................................... 125 5.8 计算重力位能模型............................................................... 130 5.8.1 第一阶段重力场建模....................................................... 130 5.8.2 第二阶段向下延续与变换..................................................... 131 5.8.3 第三阶段向上延续与恢复重力位能.................................... 132 5.9 EGM08 与航空重力及 SRTM 改正值的比较.................................... 132 5.10 与水准测量的比较.................................................................... 139 5.11 结论................................................................................................ 144 6 讨论 145 6.1 垂直参考系统............................................................................... 145 6.2 计算概述............................................................................................... 147 6.3 空间域重力预处理....................................................................... 148 6.3.1 地形重力处理....................................................................... 149 6.3.2 重力模型验证和确认.................................................... 150 6.4 谱域重力处理.................................................................................... 152 6.5 斯托克斯积分的局部化.................................................................................... 154 6.6 未来工作.................................................................................................... 156 几何地形的重力模型.................................................................... 158 参考文献 159
埃塞俄比亚的绝对位势高度系统 - ERA
3.7 计算精度................................................................................................ 87 3.7.1 连续效应.................................................................................... 87 3.8 总结.............................................................................................................. 90 4 斯托克斯积分与 FFT 91 4.1 简介................................................................................................ 91 4.2 类斯托克斯积分变换...................................................................................... 93 4.3 确定性方法............................................................................................. 95 4.4 核属性............................................................................................. 96 4.5 随机方法............................................................................................. 98 4.5.1 重力功率谱与自相关函数............................................................. 99 4.6 随机重力模型与斯托克斯积分............................................................. 104 4.6.1 环平均重力的期望值 ) ( ψ g ∆ ............ 104 4.6.2 不同的4.6.3 内核的不同部分............................................................................... 108 4.7 在有限区域上计算的大地测量内核的傅里叶变换 108 4.8 总结.............................................................................................. 113 5 地球位势垂直参考系统 114 5.1 简介......................................................................................................... 114 5.2 地球位势计算原理.................................................................................... 116 5.3 水平测量......................................................................................................... 117 5.4 新高度系统......................................................................................................... 119 5.5 为什么我们需要物理高度系统?......................................................................... 121 5.6 我们如何绘制空间中的水平表面? ................................................ 122 5.7 统一垂直参考系的标准............................................................... 124 5.7.1 潮汐系统............................................................................... 125 5.8 计算重力位能模型............................................................... 130 5.8.1 第一阶段重力场建模....................................................... 130 5.8.2 第二阶段向下延续与变换..................................................... 131 5.8.3 第三阶段向上延续与恢复重力位能.................................... 132 5.9 EGM08 与航空重力及 SRTM 改正值的比较.................................... 132 5.10 与水准测量的比较.................................................................... 139 5.11 结论................................................................................................ 144 6 讨论 145 6.1 垂直参考系统............................................................................... 145 6.2 计算概述............................................................................................... 147 6.3 空间域重力预处理....................................................................... 148 6.3.1 地形重力处理....................................................................... 149 6.3.2 重力模型验证和确认.................................................... 150 6.4 谱域重力处理.................................................................................... 152 6.5 斯托克斯积分的局部化.................................................................................... 154 6.6 未来工作.................................................................................................... 156 几何地形的重力模型.................................................................... 158 参考文献 159
埃塞俄比亚的绝对位势高度系统 - ERA
3.7 计算精度................................................................................................ 87 3.7.1 连续效应.................................................................................... 87 3.8 总结.............................................................................................................. 90 4 斯托克斯积分与 FFT 91 4.1 简介................................................................................................ 91 4.2 类斯托克斯积分变换...................................................................................... 93 4.3 确定性方法............................................................................................. 95 4.4 核属性............................................................................................. 96 4.5 随机方法............................................................................................. 98 4.5.1 重力功率谱与自相关函数............................................................. 99 4.6 随机重力模型与斯托克斯积分............................................................. 104 4.6.1 环平均重力的期望值 ) ( ψ g ∆ ............ 104 4.6.2 不同的4.6.3 内核的不同部分............................................................................... 108 4.7 在有限区域上计算的大地测量内核的傅里叶变换 108 4.8 总结.............................................................................................. 113 5 地球位势垂直参考系统 114 5.1 简介......................................................................................................... 114 5.2 地球位势计算原理.................................................................................... 116 5.3 水平测量......................................................................................................... 117 5.4 新高度系统......................................................................................................... 119 5.5 为什么我们需要物理高度系统?......................................................................... 121 5.6 我们如何绘制空间中的水平表面? ................................................ 122 5.7 统一垂直参考系的标准............................................................... 124 5.7.1 潮汐系统............................................................................... 125 5.8 计算重力位能模型............................................................... 130 5.8.1 第一阶段重力场建模....................................................... 130 5.8.2 第二阶段向下延续与变换..................................................... 131 5.8.3 第三阶段向上延续与恢复重力位能.................................... 132 5.9 EGM08 与航空重力及 SRTM 改正值的比较.................................... 132 5.10 与水准测量的比较.................................................................... 139 5.11 结论................................................................................................ 144 6 讨论 145 6.1 垂直参考系统............................................................................... 145 6.2 计算概述............................................................................................... 147 6.3 空间域重力预处理....................................................................... 148 6.3.1 地形重力处理....................................................................... 149 6.3.2 重力模型验证和确认.................................................... 150 6.4 谱域重力处理.................................................................................... 152 6.5 斯托克斯积分的局部化.................................................................................... 154 6.6 未来工作.................................................................................................... 156 几何地形的重力模型.................................................................... 158 参考文献 159