XiaoMi-AI文件搜索系统
World File Search System反射器

高速自主主题公园动作摄像头
在游乐园行业中,现有的摄像头系统不仅在快速骑行上捕获清晰,高质量的图像,而且还面临着挑战,在水上滑梯上捕获的位置不一致,其中不同的客人重量会影响下降的速度,从而影响了图像的组成。此外,这些系统依赖于具有反射器的光学触发传感器,这些反射器容易撕下水滑梯,从而导致维护问题并进一步破坏始终定位的镜头的捕获。
期间 - PERASPERA 在轨演示器用于验证核心在轨制造、组装和
2021-2025 • 来自寿命延长、重新安置/“最后一英里交付”、近距离检查和主动清除碎片等服务的收入。 2026-2030 • 除现有任务外,还有新的服务任务,如救援/维修和加油或安装推进模块 • 通过空间组装实现的新任务,可能是天线反射器组装(可以堆叠)、太阳能电池板和吊杆,它们也可以在立方体卫星或小型卫星任务中飞行。 • 月球门户的自动组装、检查和维修可以应用于载人航天。 2031-2036 • 空间组装任务(如 P/L 升级和大型天线反射器)以及载人空间站的自动维护产生大部分价值。 • 2036 年以后,可能出现首个针对太空和地球的空间增材制造任务。 • 诸如 GEO“枢纽”、超大直径反射器(+18m)、月球 ISRU 和空间发电等新应用可能成为非常大的市场。
期间 - PERASPERA 在轨演示,向太空服务、组装和
2021-2025 • 来自寿命延长、重新安置/“最后一英里交付”、近距离检查和主动清除碎片等服务的收入。 2026-2030 • 除现有任务外,还有新的服务任务,如救援/维修和加油或安装推进模块 • 通过空间组装实现的新任务,可能是天线反射器组装(可以堆叠)、太阳能电池板和吊杆,它们也可以在立方体卫星或小型卫星任务中飞行。 • 月球门户的自动组装、检查和维修可以应用于载人航天。 2031-2036 • 空间组装任务(如 P/L 升级和大型天线反射器)以及载人空间站的自动维护产生大部分价值。 • 2036 年以后,可能出现首个针对太空和地球的空间增材制造任务。 • 诸如 GEO“枢纽”、超大直径反射器(+18m)、月球 ISRU 和空间发电等新应用可能成为非常大的市场。

胆汁灰质的球形反射器具有单域纤维素纳米晶体微壳的可调颜色
通过干燥胆汁固醇液晶(CLC)对纤维素纳米晶体(CNC)干燥胆汁脱脂液晶(CNC)产生的曲面表现出的波长和极化选择性的bragg反射,这使这些生物库的纳米颗粒极有效,许多光学应用都极有效。虽然传统产生的纤维是在浮出水面,但如果给出了球形曲率,则CLC衍生的螺旋CNC排列将获得新的强大功能。干燥的CNC悬浮液液滴不起作用,因为在各向异性胶体液滴中动力学停滞的发作会导致严重的屈曲和球形形状的丧失。在这里,通过在不可压缩油滴的球形微壳中确定CNC悬浮液可以避免这些问题。这可以防止屈曲,确保强螺旋螺距压缩,并产生具有独特可见颜色的单域胆固醇球形旋转式旋转颗粒。有趣的是,受约束的收缩会导致自发穿刺,使每个粒子都有一个单个孔,可以通过该孔提取内部油相进行回收。通过在不同的分数下混合两种不同的CNC类型,在整个可见光谱中调整了反射颜色。新方法添加了一种多功能工具,以寻求使用生物培养的CLC,从而使球形弯曲的颗粒具有相同的出色光学质量和光滑的表面,与以前仅获得的曲线相同。
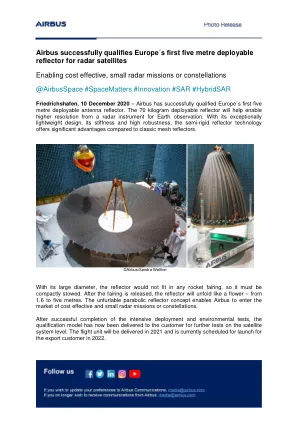
空中客车空间 #SpaceMatters #创新 #SAR #HybridSAR
由于反射器直径较大,无法装入任何火箭整流罩中,因此必须紧凑地存放。整流罩释放后,反射器将像花朵一样展开——从 1.6 米到 5 米。可展开的抛物面反射器概念使空客能够进入具有成本效益的小型雷达任务或星座市场。在成功完成密集的部署和环境测试后,认证模型现已交付给客户,以便在卫星系统级别进行进一步测试。飞行装置将于 2021 年交付,目前计划于 2022 年为出口客户发射。

http://eprints.gla.ac.uk/204543/
提出了一种游丝航天器的姿态控制策略,其中控制扭矩由与地球磁场相互作用的导电支撑结构产生。建立了该结构的数学模型,其中总扭矩由作用在每个载流结构元件上的洛伦兹力之和得出。结果表明,不同的几何配置允许在三个正交方向上产生有效磁偶极矩。利用该模型,给出了动态模拟结果,以评估导电结构使用经典 Bdot 控制定律在轨道上自行翻滚的能力。然后研究了使用该姿态控制系统操纵轨道反射器的可能性。在一个简化模型中推导出极地轨道上的大型太阳反射器持续照射地球表面固定点所需的角加速度,并与导电结构可实现的角加速度进行了比较。然后通过模拟来评估导电结构是否能够实现轨道反射器的部分姿态控制,例如在黎明和黄昏时分,当地面太阳能发电场的输出较低时照亮它们。
ECE天线和浪潮传播部(...
有几种类型的天线,包括:1.Dipole天线:它们是最常见的天线类型,广泛用于广播和电视广播中。它们由两个对称排列的导电元件组成。2.点天线:它们通常用于无线通信系统,例如Wi-Fi和蓝牙。它们平坦而薄,适合空间有限的应用。3.Yagi-uda天线:它们是定向天线,通常用于远程通信。它们由以特定模式排列的驱动元素和一个或多个寄生元素组成。4.副天赋天线:它们是高度方向性的,用于卫星通信和雷达系统。它们由抛物线反射器和位于反射器焦点的饲料天线组成。

Leica TPS1200 用户手册
7.1 角度测量 168 7.2 带反射器的距离测量(IR 模式) 169 7.3 不带反射器的距离测量(RL 模式) 172 7.4 距离测量 - 长距离(LO 模式) 175 7.5 自动目标识别 ATR 177 7.6 PowerSearch PS 180 7.7 SmartStation 181 7.7.1 SmartStation 精度 181 7.7.2 SmartStation 尺寸 183 7.7.3 SmartAntenna 技术数据 184 7.8 符合国家法规 188 7.8.1 带蓝牙的通信侧盖 188 7.8.2 GFU24、西门子 MC75 189 7.8.3 GFU19 (US)、GFU25 (CAN) CDMA MultiTech MTMMC-C 191 7.8.4 RadioHandle 193 7.8.5 带蓝牙的 SmartAntenna 195 7.9 仪器的一般技术数据 197 7.10 比例校正 204 7.11 归一化公式 211

Leica TS30/TM30 用户手册 - 工程测量师
7 技术数据 155 7.1 角度测量 155 7.2 带反射器的距离测量 156 7.3 不带反射器的距离测量 159 7.4 距离测量 - 长距离(LO 模式) 161 7.5 自动目标瞄准 ATR 163 7.6 PowerSearch PS 168 7.7 SmartStation 170 7.7.1 SmartStation 精度 170 7.7.2 SmartStation 尺寸 172 7.7.3 SmartAntenna 技术数据 173 7.8 符合国家法规 178 7.8.1 带蓝牙的通信侧盖 178 7.8.2 GFU24、西门子 MC75 179 7.8.3 GFU19(美国)、GFU25(加拿大)CDMA MultiTech MTMMC-C 181 7.8.4 GFU28、 Telit UC864-G 183 7.8.5 RadioHandle 186 7.8.6 带蓝牙的 SmartAntenna 188 7.9 仪器的一般技术数据 191