XiaoMi-AI文件搜索系统
World File Search System可重构的

在搜索后搜索操作期间软连续机器人的多模式相互作用
摘要,如果人类机器人相互作用(HRI)易于执行,则在机器人协助的搜索和救援操作效率将是有效的。可以使用柔软的机器人来完成,与刚性相比,该机器人的性能更好。其中,由于其光滑的性质,可以使用柔软的连续机器人(SCR)。SCRS有两种类型:软连续操作器(SCM)和软蛇机器人(SSR)。尽管这两个机器人在功能上不同,但在结构上是相似的。因此,这些机器人可以模块化和重新配置。SCM可以协助医疗团队进行采摘操作,而SSR可以穿越诸如地震之类的灾难后发生的限制空间。从我们的调查中推断出,文献中并没有很多研究工作侧重于disasaster后情况下的SCR的HRI方法。因此,在这项工作中,我们专注于开发模块化和可重构的SCR的HRI方法。
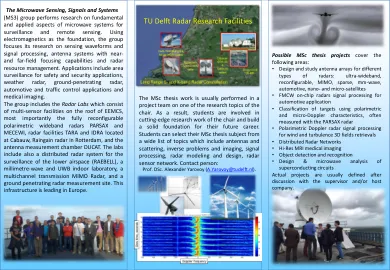
代尔夫特理工大学雷达研究设施
微波传感、信号和系统 (MS3) 小组对用于监视和遥感的微波系统的基础和应用方面进行研究。该小组以电磁学为基础,重点研究传感波形和信号处理、具有近场和远场聚焦能力的天线系统以及雷达资源管理。应用包括安全和安保应用的区域监视、气象雷达、探地雷达、汽车和交通控制应用以及医学成像。该小组包括雷达实验室,该实验室由 EEMCS 屋顶上的多传感器设施组成,最重要的是完全可重构的极化宽带雷达 PARSAX 和 MECEWI、位于 Cabauw 的雷达设施 TARA 和 IDRA、鹿特丹的 Raingain 雷达以及天线测量室 DUCAT。实验室还包括用于监视低空域 (RAEBELL) 的分布式雷达系统、毫米波和 UWB 室内实验室、多通道传输 MIMO 雷达和探地雷达测量站。这种基础设施在欧洲处于领先地位。

论文 用于可重构量子网络的 GHz 脉冲纠缠光子源
摘要 纠缠是量子网络中的通用资源,但纠缠光子源通常是为特定用例定制的。多功能性(包括状态调制和光子时间特性的可调谐性)是灵活网络架构和加密原语的关键,这些原语超越了量子密钥分发。本文,我们报告了一种灵活的源设计,可在连续波和 GHz 速率脉冲操作模式下产生高质量纠缠。利用现成的光学元件,我们的方法使用基于光纤的 Sagnac 环以高效率和高于 0.99 的保真度在电信波长下产生偏振纠缠光子。在产生纠缠态之前,高达 GHz 的相位调制也是可能的,以实现快速纠缠态切换。我们展示了 100 MHz 的相位调制,平均保真度为 0.95。此外,源 60 nm 光谱带宽与完全可重构的波长复用量子网络完全兼容。
设计的金属蛋白组装体中氧化还原和金属导向的结构多样化
人们对设计能够改变构象或改变组装状态以响应不同刺激的蛋白质产生了浓厚的兴趣,这些刺激包括配体结合、11、12 金属配位、13、14 磷酸化、15、16 和半胱氨酸氧化/还原。17、18 虽然确实存在几种此类人工多状态系统的例子,3、11–20 但设计对多种刺激作出反应的蛋白质或从单个蛋白质序列/结构中获得两种以上结构不同状态的能力却受到限制(图 1a)。21 这主要是因为大多数蛋白质设计策略都涉及实施广泛的非共价相互作用(特别是疏水堆积),以获得与深自由能最小值相对应的单一稳定结构。21–24 这种策略不仅限制了结构多样化的潜力,而且降低了所得蛋白质结构对刺激作出响应和可重构的潜力。

ris辅助无线链接签名,用于特定发射极标识:初步
摘要 - 特定的发射极标识(SEI)是一项有希望的技术,可以在不久的将来增强大量设备的访问安全性。在本文中,我们提出了一个可重构的智能表面(RIS)辅助SEI系统,其中合法发射器可以通过控制RIS的On-Off状态来自定义SEI期间的通道指纹。在不失去通用性的情况下,我们使用基于接收的信号强度(RSS)欺骗检测方法来分析所提出的体系结构的可行性。具体来说,基于RSS,我们得出了SEI的统计属性,并提供了一些有趣的见解,这些见解表明RIS辅助SEI理论上是可行的。然后,我们得出最佳检测阈值,以最大程度地提高呈现的性能指标。接下来,通过RIS辅助SEI原型平台上的概念验证实验验证了所提出系统的实际可行性。实验结果表明,当传输源分别在不同的位置和同一位置时,性能提高了3.5%和76%。

两种材料的机械、弹性和粘合性能 - IRIS
二维材料,如石墨烯、六方氮化硼 (hBN) 和过渡金属二硫属化物 (TMD),本质上具有柔韧性,可以承受非常大的应变(> 10% 的晶格变形),并且它们的光电特性对施加的应力表现出清晰而独特的响应。因此,它们在研究机械变形对固态系统的影响以及在创新设备中利用这些影响方面具有独特的优势。例如,二维材料可以轻松地将纳米级机械变形转换成清晰可检测的电信号,从而能够制造高性能传感器;然而,同样容易的是,外部应力可以用作“旋钮”来动态控制二维材料的性质,从而实现应变可调、完全可重构的设备。本文回顾了在纳米级诱导和表征二维材料机械变形的主要方法。在介绍有关这些独特系统的机械、弹性和粘合性能的最新成果之后,简要讨论了它们最有前景的应用之一:实现基于振动二维膜的纳米机电系统,该系统有可能在高频率(> 100 MHz)和大动态范围内运行。

Avstack:一个开源,可重新配置的自动驾驶汽车开发平台
自动驾驶汽车(AV)的先驱承诺将彻底改变驾驶体验和驾驶安全性。但是,AV中的里程碑的实现比预测慢。罪魁祸首包括(1)所提出的最先进的AV组件缺乏可验证性,以及(2)进行下一级评估的停滞,例如车辆到基础设施(V2I)和多主体协作。部分地,进展受到了:AV中的大量软件,摩尔群体不同的约定,跨数据集和模拟器进行测试的难度以及先进的AV Components的僵化性。为了应对这些挑战,我们提出了Avstack 1,2,一个开源,可重新配置的AV设计,实施,测试和分析的软件平台。Avstack通过在数据集和基于物理的模拟器上启用首个贸易研究来解决验证问题。avstack将停滞问题作为一个可重构的AV平台,建立在高级编程语言中的数十个开源AV Component上。我们通过在多个基准数据集中的纵向测试和V2I合作案例研究中证明了Avstack的力量,这些案例研究探讨了设计多传感器,多试剂算法的权衡。

两种材料的机械、弹性和粘合性能……
二维材料,如石墨烯、六方氮化硼 (hBN) 和过渡金属二硫属化物 (TMD),本质上具有柔韧性,可以承受非常大的应变(> 10% 的晶格变形),并且它们的光电特性对施加的应力表现出清晰而独特的响应。因此,它们在研究机械变形对固态系统的影响以及在创新设备中利用这些影响方面具有独特的优势。例如,二维材料可以轻松地将纳米级机械变形转换成清晰可检测的电信号,从而能够制造高性能传感器;然而,同样容易的是,外部应力可以用作“旋钮”来动态控制二维材料的性质,从而实现应变可调、完全可重构的设备。本文回顾了在纳米级诱导和表征二维材料机械变形的主要方法。在介绍有关这些独特系统的机械、弹性和粘合性能的最新成果之后,简要讨论了它们最有前景的应用之一:实现基于振动二维膜的纳米机电系统,该系统有可能在高频率(> 100 MHz)和大动态范围内运行。

针对可重新配置的智能表面辅助6G网络的机器学习优化的概述:从增强学习到大L
摘要 - 通过在智能无线电环境中重塑信号传播,可以使6G网络成为一种有前途的技术。但是,由于大量元素和专用的相移优化,它也会导致网络管理的显着复杂性。在这项工作中,我们提供了机器学习(ML)的概述 - 对RIS AID的6G网络启用了优化。特别是,我们专注于各种强化学习(RL)技术,例如深度Q学习,多机构强化学习,转移强化学习,等级结构强化学习和离线强化学习。与现有研究不同,这项工作进一步讨论了如何将大型语言模型(LLM)与RL结合在一起,以处理网络优化问题。它表明LLM提供了新的机会来增强RL算法的功能,从而在概括,奖励功能设计,多模式信息处理等方面。最后,我们确定了对RIS AID 6G网络的ML启用ML的未来挑战和方向。索引术语-6G,可重构的智能表面,选择性,机器学习,大语言模型。

可重新配置智能表面辅助通信系统的机器学习策略 - 审查
摘要:机器学习(ML)算法已被广泛用于改善电信系统的性能,包括可重构的智能表面(RIS)辅助无线通信系统。RI被视为第六代(6G)通信的主链的关键部分,这主要是由于其电磁特性可控制无线通道中信号的传播。ML优化(RIS)辅助无线通信系统可以是减轻无线通道中信号遭受的降级的有效替代方法,从而在系统的性能中具有显着优势。但是,多种方法,系统配置和渠道条件使得难以确定有效实现最佳解决方案的最佳技术或一组技术。本文对文献中报告的框架进行了全面审查,这些框架应用了ML和RISS来改善无线通信系统的整体性能。本文比较了可用于解决RIS辅助系统设计的ML策略。系统是根据ML方法,所使用的数据库,实现复杂性和报告的性能提高进行分类的。最后,我们阐明了基于ML策略设计和实施未来RIS辅助无线通信系统的挑战和机遇。