XiaoMi-AI文件搜索系统
World File Search System右转
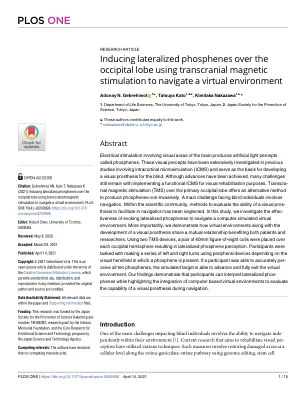
使用经颅磁刺激在枕叶上诱发侧向光幻视以导航虚拟环境
涉及大脑视觉区域的电刺激会产生被称为光幻视的人造光感知。这些视觉感知在先前涉及皮层内微模拟 (ICMS) 的研究中得到了广泛的研究,并成为开发盲人视觉假体的基础。尽管已经取得了进展,但在实施功能性 ICMS 进行视觉康复方面仍然存在许多挑战。对主枕叶进行经颅磁刺激 (TMS) 提供了一种非侵入性产生光幻视的替代方法。盲人面临的一个主要挑战是导航。在科学界,评估视觉假体辅助导航能力的方法一直被忽视。在本研究中,我们调查了唤起侧向光幻视以在计算机模拟的虚拟环境中导航的有效性。更重要的是,我们展示了虚拟环境和视觉假体的开发如何相互关联,使患者和研究人员都受益。使用两个 TMS 设备,将一对 40 毫米的 8 字形线圈放置在每个枕半球上,从而产生单侧光幻视感知。参与者的任务是使用外围设备根据存在光幻视的视觉半场进行一系列左转和右转。如果参与者能够准确地感知所有十个光幻视,则模拟目标能够前进并完全退出虚拟环境。我们的研究结果表明,参与者可以解释单侧光幻视,同时强调基于计算机的虚拟环境的集成以评估视觉假体在导航过程中的能力。
Z-1 员工报告 - Motor Parkway Associates
总体而言,开发提案包括拟建设以下建筑:1)一栋多层 384,174 平方英尺的住宅/混合用途建筑,该建筑共有 5、6、7 和 8 层,包含 300 个住宅单元,两层地下停车场,包含 332 个停车位;以及位于一楼的 5,000 平方英尺的餐厅;2)一栋六层的“年龄限制”住宅建筑,包含 166 个单元,两层停车场,包含 134 个停车位;3)一层 9,975 平方英尺的商业/零售建筑。建议增加地面停车区(包含 355 个路外地面停车位,总共 684 个停车位)。建议对约 5.2 英亩(41.22%)的标的地块进行绿化,0.44 英亩(3.45%)保持其自然状态。概念项目提案还将标的地块的 25,960 平方英尺土地描绘为“村庄绿地”和“公共区域”。只有有限的内部走道与拟建的地面停车场和道路相交,并且它们没有显示三座建筑之间的实际连接,但是有一条拟建的人行道连接到退伍军人纪念公路(纽约州 454 号公路)。标的开发地块的总面积为 551,335 平方英尺,拟建的建筑总建筑面积为 583,004 平方英尺。建议的容积率 (FAR) 为 1.06。包括村庄Islandia 分区法对 MSPDD 中“地块覆盖率”(停车场除外的所有建筑物的占地面积)的要求为 40%。拟议的“概念场地规划”(由 Robinson and Muller Engineers, PC 编制,签署人为 Christopher W. Robinson PE,经“GT”核查,日期为 2023 年 10 月 20 日)表明“建筑面积”(总建筑占地面积)的“地块覆盖率”为 20.15%;额外的不透水面积相当于 35.18%(总不透水面积 = 55.33%);“景观面积”(41.22%)和未受干扰/“保留的自然面积”(3.45%)。现场拟建住宅公寓楼的直接入口为 Motor Parkway(CR 67),位于标的物业的西南角。入口只能右转进出。拟建开发项目和所有三栋建筑的预期通道设计为仅右转出入口,可往返于退伍军人纪念公路 (NYS Rte. 454) 和 Motor Parkway (CR67)。内部街道从 Motor Parkway 一直延伸到退伍军人纪念公路,可通往地下和地面的街外停车位。Inc. Village of Islandia Main Street 规划开发区 (MSPDD) 分区法要求提供 817 个街外停车位(参见第 177-138 H 节),而拟建的 Motor Parkway Associates, LLC 开发项目符合该要求,共提供 684 个停车位(466 个地下停车位/355 个地面停车位)。萨福克县水务局 (SCWA) 将为开发场地提供公共用水。根据 Islandia 村公司提交给萨福克县规划委员会的环境评估表 (EAF 第 5 页),每天总计 106,742 加仑的水量将对供水网络产生新的需求。EAF 并未表明现有公共供水系统是否能够满足该提案的要求,但表示“将通过与 SCWA 协调来确定”。住宅公寓大楼、酒店和餐厅产生的生活废水预计约为每天 91,275 加仑,计划输送至萨福克县下水道区第 13 号 - Windwatch。作为拟议开发项目的一部分,将在整个标的物业的东南角建造一个污水泵站。

传感器和传感器
Published by IFSA Publishing, S. L., 2021 http://www.sensorsportal.com EEG Real Time Analysis for Driver's Arm Movements Identification * Enrico Zero, Chiara Bersani and Roberto Sacile Department of Informatics, Bioengineering, Robotics and Systems Engineering, University of Genova, Via all'Opera Pia 13, 16145 Genova, Italy电子邮件:enrico.zero@dibris.unige.it收到:2021年1月22日 /接受:2021年4月3日 /出版:2021年4月30日摘要:文献证明了自动驾驶在道路安全,交通拥堵和能源消费方面的潜在好处。必须由高级传感器和技术支持自动驾驶汽车,以建立对外部环境的可靠意识。但是,具有不同自动化水平的汽车在驾驶任务中需要不同水平的人类干预。在这种情况下,主要问题是确定人与自动化驾驶系统之间的相互作用,这在关键情况下需要详尽地了解驾驶员行为。本文提出了一个基于神经网络的EEG信号分类器,以通过其大脑电动活动来识别驾驶员的手臂运动,当时他/她必须转向右转或左转曲线轨迹。基于时间延迟神经网络(TDNN)的分类器旨在当参与者执行动作以移动他/她的手臂在模拟环境中行驶时抓住真正的方向盘时,旨在对人的脑电图进行分类。分类器的性能与大脑信号识别驾驶员的手臂运动有关的表现表现出了有希望的结果,值得进一步探索。关键字:脑电图,识别,神经网络,自动驾驶汽车,安全性。1。在汽车环境中,研究和创新最近集中在实现自动驾驶汽车上。自动驾驶汽车(AV)是指可以通过安装在船上的设备和传感器来检测环境,并在有限或没有人工干预的情况下开车。根据SAE International Standard 0,将AVS分为六个不同级别的自动化,从0级,驾驶员是即将到来的5级的唯一决策者,即车辆由自动驾驶系统(ADS)完全管理。详细说明,在0级,驾驶员执行所有动态驾驶任务(DDT),这些任务包括车辆运动所需的战术和操作功能。1级是
Microsoft Word - 塞斯纳事故拉杰沙希最终报告
0.概要:a) 一架 Cessna-152 飞机于 2015 年 4 月 1 日在孟加拉国当地机场进行训练飞行时发生事故。机上有两名飞行员,一名是教练飞行员(飞行教练),另一名是实习飞行员(学生飞行员),他将接受单飞后训练。事故导致飞机坠毁。撞击点位于跑道附近的草地上。飞机在撞击时起火,导致实习飞行员死亡,教练飞行员重伤。调查按照附件 13 和 ICAO 相关 DOC 中规定的程序进行,并按照附件 13 第 6 章和相关附录以及 Doc 9756 AN/965 航空器事故和事故征候调查手册第 IV 部分编写报告。b) 飞行教员正在向学生飞行员演示低空迫降练习。起飞后,他提前右转,朝右侧顺风位置降落在对面的跑道上。高度太低,顺风位置太近,以至于飞机在完成反向转弯并越过跑道之前,就撞击了跑道边缘附近的地面,并在最后一次撞击后立即起火。学生飞行员当场死于撞击力和撞击后火灾。教官飞行员虽然严重烧伤,但 43 天后还是不治身亡。飞机因撞击力和撞击后起火而完全损毁。1.正文(事实信息) 1.1 简介信息: a) 冬季天气过后,飞行学校于 2015 年 2 月初恢复飞行活动。当天天气晴朗,地面风速约为 10 节,地面温度为 33 摄氏度。教官飞行员于 2014 年 10 月被飞行学校任命为名誉飞行教官。在飞行学校工作期间,飞行教官在一家私人货运航空公司找到了一份工作,接受 SAAB-340 飞机的培训。他原定于 2015 年 4 月某个时候出国接受 SAAB-340 模拟器培训。b) 当时飞行学校没有任何高级教练对学生进行必要的检查和技能测试。因此,这位飞行教练被提供给飞行学校,在出国培训之前进行检查和测试。d) 第二天是他每周的休息日,因此 3 月 30 日飞行学校没有飞行活动。因此,应飞行学校的要求,他从 2015 年 3 月 29 日开始飞行,每次飞行时间限制为 5 天。c) 飞行教练于 2015 年 3 月 29 日进行了一次越野飞行,此后又进行了五次飞行,飞行时间为 05:00。e) 训练照常于 3 月 31 日上午恢复。飞行教练于当地时间 09:10 开始飞行训练,并与八名不同的学生进行了八次训练飞行,

ME-EC 579 教学大纲 2022 年秋季
波士顿大学工程学院课程编号:me-ec579(在 ME 和 EC 部门交叉列出),通常每年秋季授课。课程名称:纳米/微电子器件技术讲师:Dan Cole 电子邮件:dccole@bu.edu 电话:(617) 353-0432 办公室:机械工程系,133 室,圣玛丽街 15 号(办公室路线:从圣玛丽街 15 号进去,右转,沿着狭长的走廊走,左边是玻璃墙,穿过双扇门,我的办公室就在左边,133 室。我的办公室离 ECL 计算机实验室很近。)2022 年秋季学期的课程将于周二和周四下午 1:30-3:15 在圣玛丽街 15 号 EMB 105 室举行。 (从圣玛丽街 15 号进去,向右转;我们的教室 105 室是左边第一个。)课程于 2022 年 9 月 6 日星期二开始。我的办公时间为周一和周三下午 1 点至下午 2 点,通过 Zoom,当然节假日除外。如果您不能在这些时间上课,请随时通过电子邮件与我联系以安排其他时间。请使用以下 Zoom 联系方式:会议 ID 8205304635 https://bostonu.zoom.us/j/8205304635 请注意:由于微纳米电子技术已在很多领域得到应用,波士顿大学工程学院三个系以及材料科学系的学生通常都会选修这门课程。例如,考虑生物工程:如果没有微电子技术,该领域的许多先进成像、手术方法、仪器和分析都不可能实现。先决条件:您需要通常的本科数学和本科物理学。您不需要了解半导体物理学。这些材料将作为课程的一部分进行讲授。您将了解工程和科学方面以及商业方面的内容。本课程极大地说明了创新的用途,因为微电子和现在的纳米电子领域通过不断采用新的创新方法来克服障碍而继续繁荣发展。学生应为工程专业的研究生或高年级学生,或经教师同意。课程描述/目录数据:将强调制造和生产更传统的纳米/微电子设备的物理过程和制造策略。将介绍硅中重要的加工和设备方面,包括掺杂分布的制造、蚀刻、光刻、互连构造和封装。将介绍新设备、MEMS、光子学和不寻常的纳米级结构的未来方向和联系。如果这些新结构要取代 FET 和 BJT 等更传统的设备的多功能性,则将重点放在设计这些新结构以实现可制造性。将介绍设备和电路设计人员使用的方法和工具的整体集成。

战场 1 的野战手册位置
1.在战役中,在指定位置搜索战地手册:战争故事 1:穿越泥泞和鲜血 1。获得三个村庄点后上山,伐木防御墙,出口是武器站帐篷,第一本手册周围有用过的炮弹。2.在遭到轰炸的城镇中,前往右侧的防御教堂寻找临时医院/营房。大锅附近是装有第二本手册的板条箱。3.在教堂,离开后门,然后右转/左转,沿着教堂结构外部的绿色金属轮找到第三本手册。4.在 D 点,有战壕的农场,第四本手册位于房屋附近,位于结构和战壕之间的草地上。5.从前哨站沿路向上走。左边的路通向山上,山上有废弃的汽车和反坦克炮。在反坦克炮旁边的地面上是任务的最后手册,在尽头的桥之前。进入村庄之前,在左后角寻找一个有围栏后院和军用帐篷的农舍。帐篷对面是一个储藏棚,里面有一个手册箱。在城镇的郊区,在山坡上被毁坏的营地和河流附近的风车内找到一个手册箱。第三台风车位于从起点向下的山坡上,里面有另一个手册箱。穿过村庄,在石桥旁边找到第四台风车,第四本手册就在那里。从这个位置,在山谷对面的山上发现另一座风车,俯瞰着一簇建筑,里面有最终手册。战地 1 中有 66 本战地手册,收集所有手册可解锁“足够建一座图书馆”奖杯或成就。每本手册在拾取后都会立即保存,允许您退出主菜单而不会丢失进度。游戏还提供了 Codex 条目,用于查找每个任务中的所有战地手册,这些手册是获得多个奖杯和成就所必需的。泥与血中共有 61 本战地手册,分布在五个章节中。玩家必须离开坦克才能找到它们,因为它们在 Big Bertha 内不会出现在屏幕上。还建议寻找更好的武器,例如第一个战地手册点处的狙击步枪,这将解锁“追赶一些阅读”成就。在 Breakdown 中,由于光线不足,玩家需要更加仔细地观察,并记得装备消音手枪并禁用警报以继续前进。通过在特定建筑物中找到骑兵剑即可获得“比铁锹更强大”成就。对于 Avanti Savoia,有 10 本战地手册,每章包含五本。在 The Runner 中,有 15 本战地手册,分布在三个章节中,其中一些可能很难找到。
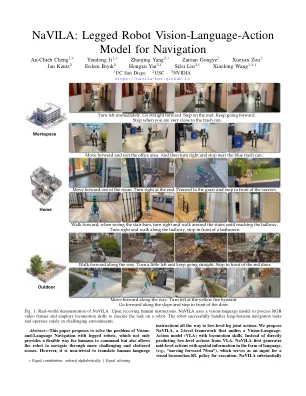
navila_paper.pdf
执行视觉和语言导航(VLN)的能力已成为现代机器人系统中的基础组成部分。使用VLN,一个机器人有望根据语言说明[1-6]在没有提供的地图的情况下在看不见的环境周围导航。这不仅为人类提供了更好的相互作用,而且还通过语言加强了跨场所的概括。在本文中,我们通过腿部机器人(例如四倍或人形生物)进一步扩展了VLN的研究。使用腿而不是轮子可以使机器人在更具挑战性和混乱的场景中导航。如图1,我们的机器人可以在狭窄的人行道上浏览一个凌乱的实验室空间,从房屋中的房间过渡到房间,以及解决户外挑战性的环境,例如带有小岩石,孔和槽的不均匀地形。要将语言转换为动作,机器人需要对输入语言进行推理,并执行闭环计划以及低级控制。随着大语言模型(LLM)和视觉模型(VLM)的最新进展,已经开发了几个端到端视觉语言动作(VLA)系统[7-9]。这些系统对具有大规模的机器人操纵演示的通用Propose VLM微调,以产生低级动作。虽然在单个模型中统一推理和执行令人着迷,并且表现出令人鼓舞的结果,但值得深入研究以下问题:是否有更好的方法来代表量化的低级命令以外的动作?毕竟,LLM和VLM主要接受了自然语言的培训。当我们需要将推理转换为精确的非语言行动时,统一推理和执行变得具有挑战性。受到VLM [10,11]的最新进展的启发,我们提出了纳维拉(Navila)的提议,这是一个针对腿部机器人VLN的两个级别框架:VLM的两级框架,可以很好地输出中级动作(VLA),以“右转30度”的策略,以及训练的范围,以“转向30度”。VLA的中级动作输出无需低级命令传达位置和方向信息。该框架的优点是三个方面:(i)通过将低级执行与VLA分解,可以通过交换低级策略来在不同的机器人上应用相同的VLA; (ii)将动作表示为中级语言指令,可以通过不同的数据源进行VLA培训,包括真实的人类视频和推理质量检查任务。这可以增强推理功能,而不会过度拟合特定的低级命令,并可以利用现实世界数据进行概括; (iii)Navila在两个不同的时间尺度上运行:VLA通常是一个大型且计算密集的模型,以较低的频率运行,提供高级导航命令;运动策略实时运行。这种双频方法允许

费用表
临时和紧急法规,第 259 - 4 B 条 75 美元实验性法规,第 259 - 5 条 35 美元因施工、维护或特殊活动而关闭或限制的街道上的交通,第 259 - 6 C 条 35 美元游行和集会使用街道,第 259 - 7 D 条 100 美元某些桥梁和高架结构上设定的最高速度限制,第 259 - 11 BB 条 35 美元并且超过 10 英里的每英里每英里 2 美元某些车辆在危险坡度上设定的最高速度限制,第 259 - 12 B 条 35 美元并且超过 10 英里的每英里每英里 2 美元公园内设定的最高速度限制,第 259 - 13 B 条 35 美元并且超过 10 英里的每英里每英里 2 美元某些位置的交通信号,第 259 - 14 B 条 25 259 - 15 B $25 设立单行道,第 259 - 16 B $25 设立环形交通岛,第 259 - 17 B $25 禁止或限制在某些交叉路口转弯,第 259 - 18 B $25 只允许在某些交叉路口右转,第 259 - 19 B $25 在某些位置禁止掉头,第 259 - 20 B $25 设立禁止超车区,第 259 - 21 B $25 设立让行交叉路口,第 259 - 23 B $25 限制使用手推车,第 259 - 25 C $100 溜冰鞋、滑板、过山车、雪橇及类似玩具,第 259 - 26 C $100 在某些街道和桥梁上设立车辆重量限制,第 259 - 27 B 章 $150超过 3000 磅,每 500 磅加收 150 美元 某些街道和桥梁上车辆大小限制,第 259 章 - 28 B 章 100 美元 某些街道和桥梁上车辆重量和大小限制,第 259 章 - 29 B 章 100 美元 某些街道上限制卡车通行,第 259 章 - 30 B 章 100 美元 在人行横道上停车是违法的,第 259-36 章 60 美元 禁止在消防栓和消防区停车,第 259 章 - 42 章 60 美元 在禁止停车区域停车罚款,第 259 章 - 46 章 60 美元 违规和处罚,第 259 章 - 87 章 50 美元 违规和处罚,第 259 章 - 92 A 章 75 美元 违规和处罚,第 259 章 - 92 B 章 75 美元- 97 停车违规罚款 25 美元,第 259 章 - 104

ME-EC 579 教学大纲 2018 年秋季
波士顿大学工程学院 课程编号:me-ec579(在 ME 和 EC 部门交叉列出),通常在每年秋季和某些夏季授课 课程名称:纳米/微电子器件技术 讲师:Dan Cole 电子邮件:dccole@bu.edu 电话:(617) 353-0432 办公室:机械工程系,圣玛丽街 15 号 133 室(办公室路线:从圣玛丽街 15 号进去,右转,沿着狭长的走廊走,左边是玻璃墙,穿过双扇门,我的办公室就在左边,133 室。我的办公室离 ECL 计算机实验室很近。)2018 年秋季学期的课程将于周二和周四下午 1:30-3:15 在圣玛丽街 15 号 EMB 105 室举行。 (从圣玛丽街 15 号进去,向右拐;我们的教室,105 室,在左边第一个。)课程于 2018 年 9 月 4 日星期二开始。我的办公时间为周一上午 9 点至 10:30,周五下午 1 点至 2 点,当然节假日除外。请参阅上文了解前往我办公室的路线。如果您不能按时上课,请随时通过电子邮件与我联系以安排其他时间,或者直接过来看看我是否有空。请注意:由于微电子和纳米电子技术已在很多领域得到应用,波士顿大学工程学院所有三个系以及材料科学系的学生通常都会选修这门课程。例如,考虑生物工程:如果没有微电子技术,该领域的许多先进成像、手术方法、仪器和分析都不可能实现。先决条件:您需要常规的本科数学和本科物理学。您不需要了解半导体物理学。这些材料将作为课程的一部分教授。您将了解工程和科学方面以及商业方面的内容。本课程极大地说明了创新的用途,因为微电子和纳米电子领域通过不断采用新的创新方法克服障碍而不断繁荣。学生应为工程专业的研究生或高年级学生,或经教师同意。课程描述/目录数据:将强调制造和生产更传统的纳米/微电子设备的物理过程和制造策略。将介绍硅中重要的加工和设备方面,包括掺杂分布的制造、蚀刻、光刻、互连构造和封装。将介绍新设备、MEMS、光子学和不寻常的纳米级结构的未来方向和联系。如果要取代 FET 和 BJT 等更传统的设备的多功能性,将重点放在设计这些新结构以实现可制造性。将介绍设备和电路设计人员使用的方法和工具的整体集成。

美国空军飞机事故调查
2018 年 2 月 20 日 2018 年 2 月 20 日,0838L,一架 F-16CM,尾号 (T/N) 92-3883,在从日本三泽空军基地 (AB) 起飞的例行训练飞行中发生发动机起火,必须立即降落回三泽空军基地。事故飞机 (MA) 驻扎在日本三泽空军基地,隶属于第 35 战斗机联队第 13 战斗机中队。MA 发动机受损,外部油箱丢失,政府损失估计为 987,545.57 美元。事故航班 (MF) 由两架 F-16CM 飞机组成。事故航班的飞行前检查、起飞和滑行都平安无事,直到起飞阶段。事故飞行员 (MP) 离开 28 号跑道 (RWY),比事故长机飞行员 (MLP) 晚离开加力起飞后不久,三泽空中交通管制员通知 MP 和事故领航员 (MLP),MP 飞机后部出现大火。MLP 还就火灾问题联系了 MP。在 MP 上升过程中,他注意到空速和爬升率意外下降。MP 右转返回 28 跑道,当无法保持空速或高度时,MP 按照 F-16CM 关键行动程序抛弃了外挂物(外部油箱)。抛弃后,MA 恢复了一些空速,并实现了更好的爬升率,进入着陆位置。MP 降落在 28 跑道上,并完成了紧急发动机关闭和紧急地面疏散关键行动程序。事故没有造成人员伤亡。MP 在事故过程中的行动是专注、精确和适当的;他的行为不是事故的原因。对维护程序的审查发现了导致事故的几项过去的行为。AIB 主席根据大量证据发现,事故原因是过时的部件断裂,导致发动机过热。2012 年,维护人员订购并安装了一个过时的部件——涡轮框架前整流罩,而几年前它被一个由更坚固的材料和设计制成的前整流罩所取代。物流系统随后运送了过时的前整流罩。维护人员使用更新版本的支架硬件将过时的前整流罩安装在事故发动机 (ME) 上。过时的前整流罩材料较弱,加上不匹配的硬件造成的磨损,最终导致前整流罩在起飞时断裂。断裂后,一块前整流罩被抬起并阻塞了发动机周围的冷却气流,导致阻塞附近区域过热并起火。 AIB 主席进一步通过大量证据发现,2012 年至 2015 年期间的维护实践是导致事故发生的重要原因。根据 10 USC§2254(d)事故调查人员在事故调查报告中对事故原因或促成事故的因素的意见(如果有)不得作为因事故引起的任何民事或刑事诉讼的证据,此类信息也不能被视为美国或这些结论或声明中提及的任何人对责任的承认。