XiaoMi-AI文件搜索系统
World File Search System喀斯特

生物防治
本研究旨在通过多步骤工艺开发一种有效的生物制剂,以防止新鲜柑橘类水果采后真菌腐烂,该工艺包括从柑橘果皮中分离和鉴定乳酸菌 (LAB)、选择具有高抗真菌活性的 LAB 菌株、对无细胞上清液 (CFS) 进行化学表征、配制用 LAB 发酵物激活的柠檬皮粉状培养基 (LM)、对发酵 LM 进行化学表征以及评估新生物制剂对抗蓝霉菌的功效。从柑橘类水果皮中回收了 13 种 LAB,并通过肽质量指纹图谱法进行鉴定。使用双培养覆盖法和扩散琼脂测定法,分别测试了从柑橘类水果中分离的 LAB 以及从其液体培养物中获得的无细胞上清液 (CFS) 对抗多种植物病原真菌和卵菌的抗真菌活性。两个分离株被命名为 N3B2 和 M2B2,均被鉴定为植物乳杆菌,因其相关的抗真菌活性而被选中。这两个分离株都表现出广谱拮抗活性,包括柑橘果实的主要采后病原体,例如指状青霉菌和意大利青霉菌,分别是绿霉菌和蓝霉菌的病原体,链格孢菌,胶孢炭疽菌,喀斯特炭疽菌,柑橘腐霉菌和Ph. nic otianae。N3B2 和 M2B2 分离株被用作发酵剂,以发酵富含营养水溶液 (LM) 的柠檬皮粉培养基。通过使用 N3B2 和 M2B2 分离株发酵 LM 获得的两种制剂对用于初步筛选 LAB 的相同广泛病原体表现出强大的体外抑制活性。此外,这两种基于 LM 的配方降低了蓝霉感染的严重程度,并抑制了人工接种的柠檬果实上 P. italicum 的孢子形成。基于 LM 的生物配方的化学分析表明,它们的抗真菌活性很可能是由于乳酸菌衍生的酸性成分,包括乳酸、乙酸、DL-3-苯基乳酸、3-4-二羟基氢化肉桂酸、水杨酸香草酸。这些创新的基于 LM 的生物配方用乳酸菌衍生的抗真菌化合物激活,将被用作可食用和可生物降解的水果涂层,以延长新鲜柑橘水果的保质期并防止收获后腐烂。
塔拉哈西市/莱昂县地方减灾战略
1. 过去五年莱昂县建筑趋势热图 2. Hazus-MH 方法的概念模型 3. 洪水深度工作流程图 4. 1985 年至 2017 年莱昂县 65 英里范围内飓风的历史轨迹 5. 2014 年登陆概率区域地图 6. NOAA 对 1993 年 3 月 13 日佛罗里达州墨西哥湾沿岸风暴潮的估计 7. 三级飓风路径 8. 按人口普查区划分的三级飓风损失——莱昂县 9. 按人口普查区划分的三级飓风损失——塔拉哈西市 10. 住房脆弱性——莱昂县 11. 住房脆弱性——塔拉哈西市 12. 塔拉哈西市的历史遗产 13. 移动房屋群和飓风风暴浪潮 14. 富兰克林县和莱昂县内的飓风风暴浪潮预估 15. 2018 年美国各县平均云地闪电密度 16. 佛罗里达州莱昂县雷电密度图 17. 干旱强度和影响 18. 2000 年至 2019 年佛罗里达州干旱地图 19. 百年一遇的洪泛区 – 莱昂县 20. 百年一遇的洪泛区 – 塔拉哈西市 21. AE 区洪水深度 – 莱昂县 22. AE 区洪水深度 – 塔拉哈西市 23. 百年一遇的洪泛区中的移动房屋群 24. 百年一遇的洪泛区中的化粪池 25. 佛罗里达州莱昂县的野外城市交界处 26.佛罗里达州莱昂县野外城市交界处火灾风险 27. 佛罗里达州莱昂县喀斯特沉降报告,1999 - 2016 年 28. 天坑发生区域:佛罗里达州 29. 2019 年南方松甲虫预测侵染程度 30. 2015 年佛罗里达州乡镇南方松甲虫危险等级地图 31. 大流行阶段 32. 大流行严重程度指数,2007 年 33. 按大流行性流感严重程度划分的社区策略 34. 向世卫组织报告的禽流感 A(H5N1) 累计确诊病例数,
决议 VIII.6 拉姆萨尔湿地清单框架
“湿地:水、生命和文化” 湿地公约缔约方大会第八届会议(伊朗拉姆萨尔,1971 年) 西班牙瓦伦西亚,2002 年 11 月 18-26 日 决议 VIII.6 拉姆萨尔湿地清单框架 1.回顾建议 1.5,其中缔约方表示需要编制其湿地清单“以帮助制定和实施国家湿地政策”,以及决议 VII.6,其中缔约方通过了有关这些问题的指导方针; 2.还回顾了建议 4.6、决议 5.3 和 VI.12 以及《1997-2002 年战略计划》的行动 6.1.2,缔约方在这些行动中都承认国家清单对于确定适合列入《公约》下的国际重要湿地名录(拉姆萨尔名录)的地点的价值; 3.意识到缔约方在《1997-2002 年战略计划》的行动 6.1.3 和决议 VII.20 中还承认基线湿地清单对于量化全球湿地资源作为评估其现状和趋势、确定适合恢复的湿地以及进行风险和脆弱性评估的基础的重要性; 4.回顾湿地国际组织题为《全球湿地资源评估和湿地清单优先事项》(GRoWI)的报告结果,该报告向缔约方会议第七届会议指出,几乎没有国家对其湿地资源进行全面的国家清单编制,而且不可能对世界湿地资源提供明确的基线估计数,且不具备任何信心; 6.注意到本次会议通过了《湿地恢复原则和准则》(第 VIII.16 号决议);《综合沿海区管理(ICZM)中的湿地问题》(第 VIII.4 号决议);《确定和指定代表性不足的湿地类型为国际重要湿地的附加指导》(第 VIII.11 号决议);《拉姆萨尔湿地和其他湿地管理规划新准则》(第 VIII.14 号决议);《泥炭地全球行动准则》(第 VIII.17 号决议),所有这些准则的实施将在很大程度上得益于国家和其他规模的湿地清单;5.注意到湿地国际与荷兰内陆水管理和废水处理研究所 (RIZA) 的联合项目已经扩展并更新了所有欧洲国家的 GRoWI 分析; 7.意识到千年生态系统评估(MA)正在评估全球生态系统的状况、现状和趋势,包括内陆湿地、地下(喀斯特)、沿海和海洋系统,这将包括遥感的新应用,这可能会增强有关全球湿地分布及其状况的信息;

基于地面的植被生长监测 -
由生态气象观察站拍摄的多视图现实生活图像可以为植被监测提供高通量可见光(RGB)图像数据,但目前,关于多视图图像的植被监测效应及其与卫星遥感监测的植被监测效应的研究报告很少。在这项研究中,使用了喀尔斯特裸露的岩石和植被作为研究对象,使用4个生态学术站的远景图像和近视图图像来比较机器学习细分算法对远距离和近乎近距离图像的分段算法的细分效应,分析远距离观点的植被图像和远距离观察的图像以及远距离的远程图像和远距离的远程图像和远距离的远距离图像。结果表明:(1)机器学习算法适用于多视图图像的绿色植被分割。近视图图像的机器学习算法的分割精度高于远景图像的分割精度,精度率超过85%。在弱光条件下捕获的图像可以获得更高的植被分割精度,而裸岩的比例对图像分割精度没有明显影响。(2)不同RGB植被指数所呈现的植被的年际变化趋势差异很大,从远处看,植被的年际变化差异大于近距离观点。ndyi和rgbvi在植被变化中表现出良好的一致性,也可以更好地显示植被的年际差异。从年内变化的角度,各种RGB植被指数显示出不同程度的季节性变化。喀斯特地区的植被从4月到10月生长良好,RGB植被指数从5月到6月在大多数车站达到了高峰。从遥远的角度来看,植被指数的季节性分布更为明显。(3)地面多视图RGB植被指数与不同卫星的NDVI之间的相关性存在显着差异。与FY3D NDVI的相关性比Modis NDVI弱。大多数RGB植被指数与MODIS NDVI有良好的相关性,并且具有显着差异的索引(P <0.05)占70.5%。从远处看,大多数RGB植被指数与FY3D NDVI和MODIS NDVI之间的相关性比近距离观点更好,并且在RGB索引中与不同站点和近距离近距离近距离的NDVI相关的RGB指数有显着差异。机器学习算法与NLM过滤优化相结合,在多视图图像分段中具有很大的优势。不同的RGB植被指数对植被生长的变化有不同的反应,这可能与植被指数和植被形态和位置的带子组成有关。卫星的图像射击模式更接近远视角,因此
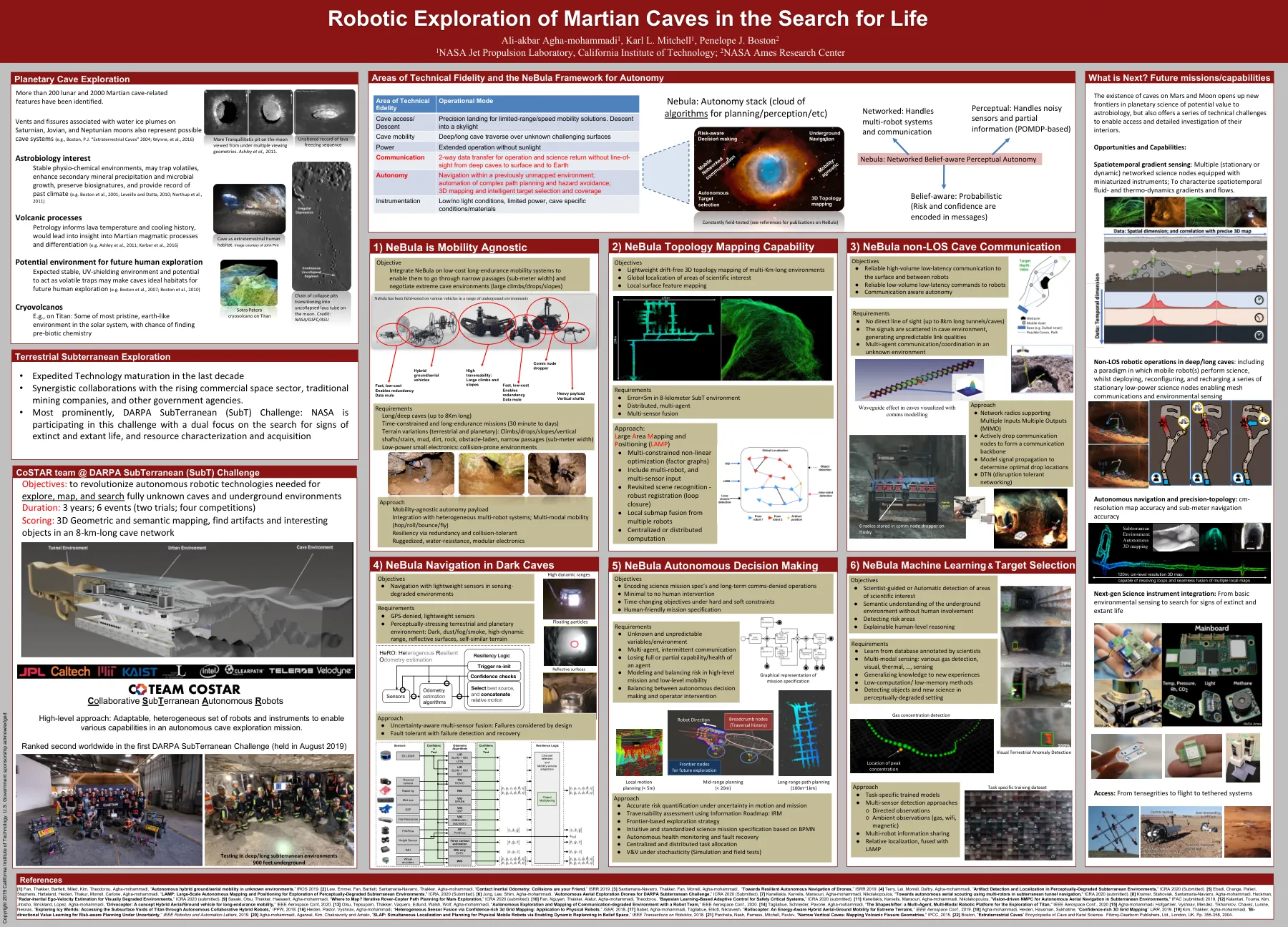
机器人探索火星洞穴寻找生命
[1] Fan,Thakker,Bartlett,Miled,Kim,Theodorou,Agha-Mohammadi,“自动杂种地面/未知环境中的空中移动性”,IROS 2019。[2] Lew,Emmei,Fan,Bartlett,Santamaria-Navarro,Thakker,Agha-Mohammadi,“接触惯性探测:碰撞是您的朋友,” ISRR2019。[3] Santamaria-Navarro,Thakker,Fan,Morrell,Agha-Mohammadi,“迈向无人机的弹性自动导航”,ISRR2019。[4] Terry,Lei,Morrell,Daftry,Agha-Mohammadi,“感知衰落的地下环境中的伪影检测和定位”,ICRA 2020(提交)。[5] Ebadi,Change,Palieri,Stephens,Hatteland,Heiden,Thakur,Morrell,Carlone,Carlone,Agha-Mohammadi。“灯:大规模的自主映射和定位,用于探索感知衰落的地下环境,” ICRA,2020年(提交)。[6] Jung,Lee,Shim,Agha-Mohammadi,“ DARPA地下挑战的自动空中勘探无人机”,ICRA 2020年(提交)。[7] Kanellakis,Karvelis,Mansouri,Agha-Mohammadi,Nikolakopoulos,“在地下隧道导航中使用多旋转器使用多旋翼的自主空中搜寻”,ICRA 2020(提交)。[8] Kramer,Stahoviak,Santamaria-Navarro,Agha-Mohammadi,Heckman,“视觉上降解环境的雷达惯性自我效率估计”,ICRA 2020(提交)。[9] Sasaki,Otsu,Thakker,Haesaert,Agha-Mohammadi,“在哪里映射?迭代的漫游者 - 弯曲器路径计划火星探索,” ICRA 2020(提交)。[10] Fan,Nguyen,Thakker,Alatur,Agha-Mohammadi,Theodorou。“基于贝叶斯学习的自适应控制对安全关键系统的自适应控制”,ICRA 2020(提交)。[11] Kanellakis,Karvelis,Mansouri,Agha-Mohammadi,Nikolakopoulos,“在地下环境中进行自主空中航行的视觉驱动的NMPC,IFAC(提交),[12],[12] [12]长期耐药性活动的概念混合空中/地面车辆。[13] Otsu,Tepsuporn,Thakker,Vaquero,Edlund,Walsh,Walf,Wolf,Agha-Mohammadi,“与机器人团队对贫困环境的自动探索和映射”[14] Tagliabue, Schneider, Pavone, Agha-mohammadi, “ The Shapeshifter: a Multi-Agent, Multi-Modal Robotic Platform for the Exploration of Titan, " IEEE Aerospace Conf., 2020 [15] Agha-mohammadi, Hofgartner, Vyshnav, Mendez, Tikhomirov, Chavez, Lunine, Nesnas, “探索冰冷的世界:通过自动协作混合机器人访问泰坦的地下空隙,” IPPW,2018。[16] Heiden,牧师,Vyshnav,Agha-Mohammadi,“通过置信度丰富的3D网格映射:应用于物理机器人的异质传感器融合:Iser,2018年。[17] SABET,AGHA-MOHAMMADI,TAGLIABUE,ELLIOTT,NIKRAVESH,“滚筒式:能源吸引能量的混合杂种空中地形迁移率对极端地形”,IEEE Aerospace Conf。,2019年。[18] Agha-Mohammadi,Heiden,Hausman,Sukhatme,“信心丰富的3D网格映射” IJRR,2019年。[19] Kim,Thakker,Agha-Mohammadi,“不确定性下的风险感知计划的双向价值学习”,IEEE机器人和自动化信,2019年。[21] Parcheta,Nash,Parness,Mitchell,Pavlov,“狭窄的垂直洞穴:映射火山裂缝几何形状”,IPCC,2015年。pp。[20] Agha-Mohammadi,Agarwal,Kim,Chakravorty和Amato,“ Slap:通过在信仰空间中启用动态重建的物理移动机器人的同时本地化和计划,”机器人技术的IEEE Transactions,2018。[22]波士顿,“洞穴和喀斯特科学的百科全书”。Fitzroy-Dearborn Publishers,Ltd。,英国伦敦。355-358,2004。