XiaoMi-AI文件搜索系统
World File Search System四轮驱动
四轮驱动 - MyNavyHR - Navy.mil
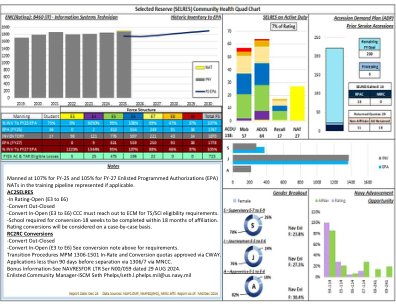
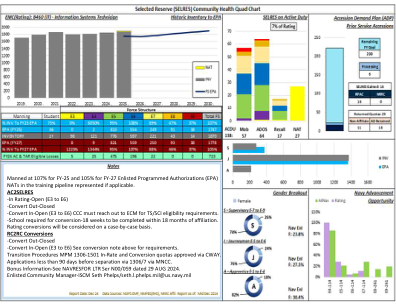
FY-25 的人员配备为 107%,FY-27 的人员配备为 105%,如果适用,则代表训练管道中的士兵程序授权 (EPA) NAT。AC2SELRES -进入评级-开放(E3 到 E6)-转换出-封闭-转换进入-开放(E3 到 E6)CCC 必须联系 ECM 以了解 TS/SCI 资格要求。-转换所需的学校-18 周需在加入后的 18 个月内完成。评级转换将根据具体情况考虑。RC2RC 转换-转换出-封闭-转换进入-开放(E3 到 E6)有关要求,请参阅上面的转换说明。过渡程序 MPM 1306-1501 通过 CWAY 批准的进入率和转换配额。通过 MNCC 的 1306/7 在分离前少于 90 天提交申请。奖金信息 - 请参阅 2024 年 8 月 29 日的 NAVRESFOR LTR Ser N00/059。入伍社区经理 - ISCM Seth Phelps/seth.l.phelps.mil@us.navy.mil
四轮驱动 - MyNavyHR - Navy.mil
FY-25 的人员配备为 107%,FY-27 的人员配备为 105%,如果适用,则代表训练管道中的士兵程序授权 (EPA) NAT。AC2SELRES -进入评级-开放(E3 到 E6)-转换出-封闭-转换进入-开放(E3 到 E6)CCC 必须联系 ECM 以了解 TS/SCI 资格要求。-转换所需的学校-18 周需在加入后的 18 个月内完成。评级转换将根据具体情况考虑。RC2RC 转换-转换出-封闭-转换进入-开放(E3 到 E6)有关要求,请参阅上面的转换说明。过渡程序 MPM 1306-1501 通过 CWAY 批准的进入率和转换配额。通过 MNCC 的 1306/7 在分离前少于 90 天提交申请。奖金信息 - 请参阅 2024 年 8 月 29 日的 NAVRESFOR LTR Ser N00/059。入伍社区经理 - ISCM Seth Phelps/seth.l.phelps.mil@us.navy.mil
四轮驱动车 2024
因此,在 Quadriga 2024 计划下,德国联邦国防军将在德国国内外举行几次大规模演习,并将其与其盟友在五个月内的训练项目结合起来。作为德国对北约“坚定捍卫者2024”大型演习的贡献,“四驾马车2024”旨在表明德国联邦国防军有决心、有能力为北约东翼的防御做出决定性贡献。多国实兵演习除了警戒、部署演习外,还旨在训练迅速将己方部队部署至挪威、立陶宛或罗马尼亚的能力,以及掌握陆军的使用知识。此外,德国联邦国防军还将在整个期间为通过德国运送部队和装备的北约伙伴武装部队提供宝贵的支持和保护。

四轮驱动插电式混合动力汽车双自适应等效油耗最小化策略
摘要:能量管理策略对于发挥四轮驱动插电式混合动力汽车(4WD PHEV)的节能效果至关重要。针对4WD PHEV中复杂的多能量系统,提出一种新的双自适应等效消耗最小化策略(DA-ECMS)。该策略通过引入未来驾驶工况类别来调整等效因子,提高驾驶工况的适应性和经济性,优化多能量系统的管理。首先,采用自组织神经网络(SOM)和灰狼优化器(GWO)对驾驶工况类别进行分类,离线优化多维等效因子;其次,采用SOM进行驾驶工况类别识别,并匹配多维等效因子;最后,DA-ECMS完成前轴多能源与电驱动系统的多能量优化管理,释放4WD PHEV的节能潜力。仿真结果表明,与基于规则的策略相比,DA-ECMS经济性提高了13.31%。

Ford_Acronyms_List.csv 首字母缩略词列表(所有者 = Graham ...
首字母缩略词 SAE 定义(括号中为 SAE 定义) ============================================================================================== 1PP 首次生产验证 2V 双气门发动机配置 4V 四气门发动机配置 2WD 两轮驱动 3GR 三档 4EAT 四速电动自动轴 4FE 四速电动自动轴 4GR 四档 4P 生产部件验证程序 4R70W 四速 RWD 宽比自动 700 ft-lbs 4WAL 四轮防抱死 4WD 四轮驱动 4WS 四轮转向 4X4 四轮驱动开关 4X4L 四轮驱动低速开关 5P 预生产部件验证程序 5R50 五速RWD 500 英尺磅 8D 八个领域 A ... - 部分电子 A4UE FWD 版本 A4LD-E AA 外观认可 AAI 空气辅助喷射器 ABI 适用二进制接口 ABS 经济适用房结构 ABS 防抱死制动系统 ABS/TC 防抱死制动系统/牵引力控制辅助模块 AC 空调 AC 交流电 ACA VECTOR 装配代码校准源文件 ACC 空调离合器 ACCP 油门踏板传感器 ACCR 空调离合器继电器 ACCS 空调循环压力开关
1991 电气图和诊断手册
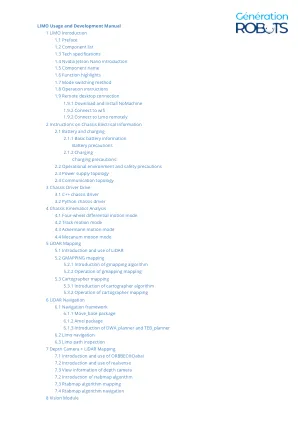
空调................................................................................................................ A-91 加热器................................................................................................................ A-91 辅助加热器.............................................................................................................. A-91 仪表和警告指示器........................................................................................ A-100 音频警报模块...................................................................................................... A-111 后轮防抱死制动器/制动警告......................................................................... A-114 顶灯............................................................................................................. A-118 巡航控制............................................................................................................. A-122 四轮驱动............................................................................................................. A-125 电动后视镜和门锁.................................................................................... A-127 电动车窗............................................................................................................. A-136 收音机 AM 和 AM/FM 立体声............................................................................. A-143 后除雾器............................................................................................................. A-146 后灯.............................................................................................................
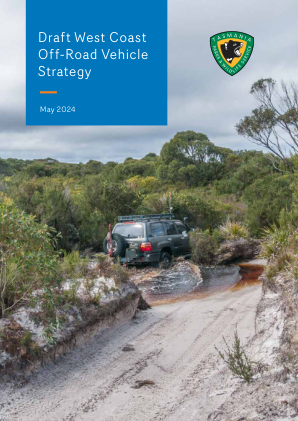
西海岸越野车战略草案
60 多年来,休闲用户更广泛地享受着亚瑟-派曼保护区 (APCA) 和塔斯马尼亚西海岸的越野赛道。从历史上看,越野车包括四轮驱动车 (4WD)、四轮摩托车、沙滩车和其他机动休闲车 (4WD 和 AWD)。与 60 年前相比,现在有了新型越野车,它们拥有更大的动力和容量来应对艰难的驾驶挑战。
在美国注册的轻型车辆的电动汽车效率比
执行摘要电动汽车(EV)比汽油汽车更有效地使用能量,这是一个主要属性,可以提高扭矩和降低的运营成本和温室气体排放。电动汽车效率比(曾经) - 代表给定数量的能量推动EV除以它推动汽油车的距离,因此在计算电动汽车的财务和环境效益时很重要。研究人员至少自2007年以来一直在间接估计Evers,但这些估计中的大多数来自小型车队或车辆模拟器。本文通过计算在美国注册的所有2021辆轻型车辆,从美国能源部的燃油经济性指南,环境保护局(EPA)车辆测试和Experian车辆注册配对大量数据集,从而改善了这些估计。该分析还跨越了各种车辆类,驱动系统,驱动周期和马力与权重的比例进行基准测试。美国有史以来的整体计算为4.4,这意味着,平均EV在给定能量的4.4倍以比平均汽油载体更远。在EPA城市测试中,此比率更大(5.1),主要是由于再生制动,而在高速公路测试中较小(3.6)。在四轮驱动车辆和具有较高功率重量比的四轮驱动车辆和车辆中也越来越大。此信息对于对电动汽车,驱动因素和车队经理的环境和经济利益进行建模,评估电动汽车的收益的环境和经济利益很有价值,以及在最有益的市场部门激励EV购买的政策制定者。