XiaoMi-AI文件搜索系统
World File Search System城市搜救
城市搜救人员课程 I 级,课程 003-23
PT 制服 (1 套) 夏季/冬季(1 套) 雨具(1 套) 雨天装备(1 套) 寒冷天气装备(1 套) 寒冷天气装备(1 套) 笔记本、钢笔和铅笔(1 支) 笔记本、钢笔和铅笔(1 支) 驱虫剂 1(春/夏季) 驱虫剂(春/夏季) 个人卫生用品包 (1) 驼峰 (1) 便装(休闲装)(1) 个人卫生用品包 (1) 便装(休闲装)(1) 14. 将发放个人防护设备 (PPE)。 15. 联系方式:
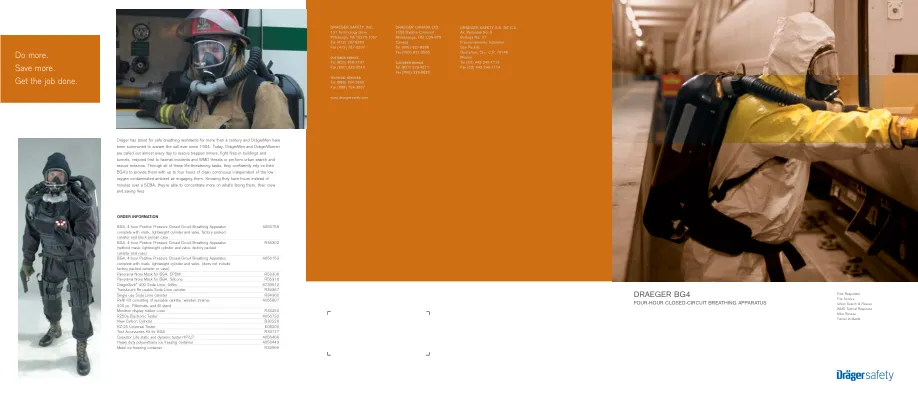
做得更多。节省更多。完成工作。 - All Hands Fire
一个多世纪以来,德尔格一直代表着全球的安全呼吸,自 1904 年以来,德尔格男士就一直响应这一号召。如今,德尔格男士和德尔格女士几乎每天都要出动去营救受困矿工、扑灭建筑物和隧道中的火灾、首先应对危险品事件和大规模杀伤性武器威胁或执行城市搜救任务。在所有这些危及生命的任务中,他们自信地依靠 BG4 为他们提供长达四小时的清洁连续呼吸,而不受周围低氧污染空气的影响。他们知道自己有几个小时而不是几分钟的时间戴 SCBA,因此能够更加专注于自己和团队面临的问题以及拯救生命
评估联邦公路的技术差距...
首字母缩略词和缩写列表 COTS 商用现货 DHMS 数字公路测量系统 DMI 测距仪 FHWA 联邦公路管理局 GPS 全球定位系统 HPMS 公路性能监测系统 IHSDM 交互式公路安全设计模型 INS 惯性导航系统 LADAR 激光探测和测距 LIDAR 光探测和测距 MET 主元素表 MIRE 道路元素最低清单 MMIRE 模型道路元素最低清单 MMUCC 模型最低统一碰撞标准 MUTCD 统一交通控制设备手册 NCDOT 北卡罗来纳州交通部 SHRP-2 战略公路研究计划 SIFT 尺度不变特征变换 TSIMS 运输安全信息管理系统 TT 技术表 US&R 城市搜救 WAAS 广域增强系统
2010 年 4 月 6-7 日近倒塌建筑物监测与感应研讨会
第 2 天 – 2010 年 4 月 7 日,星期三 主题:研讨会第二天主要讨论 a) 应急管理人员需要的信息,包括所需信息的类型和优先级以及应急管理人员需要以何种形式传输信息,b) 可能导致应急管理人员暂停或停止救援或稳定工作的信息,c) 不确定性在实时决策中的作用,以及 d) 向结构工程师和其他利益相关者传达信息的方法。此外,研讨会与会者还讨论了需要开发以更好地处理信息的监测和传感技术。这包括 a) 需要感测和收集的数据,b) 濒临倒塌建筑物的损坏识别方法,c) 濒临倒塌建筑物的结构识别/分析方法,以及 d) 事件前与事件后传感器(由应急管理人员和 FEMA 城市搜救 [US&R] 人员部署)。

人机共同学习的设计模式
人们相信,人工智能推动的技术飞速发展将加强人类与人工智能作为团队伙伴的合作。成功的合作需要合作伙伴相互了解并了解任务。这种人机共同学习可以通过呈现使合作伙伴能够分享知识和经验的情况来实现。在本文中,我们描述了任务环境和研究共同学习的程序的开发和实施。更具体地说,我们设计了特定的交互序列,旨在启动和促进共同学习过程。在一项实验中评估了这些干预措施对学习的影响,该实验使用简化的虚拟城市搜救任务,供人机团队使用。人类参与者与绿野仙踪(即实验者的同伙,执行与基于本体的人工智能模型一致的机器人行为)合作执行了受害者救援和疏散任务。设计的交互序列,即学习设计模式 (LDP),旨在实现共同学习。结果表明,LDP 有助于人类理解和认识他们的机器人伙伴和团队合作。对协作流畅度和团队绩效均未发现影响。结果用于讨论共同学习的重要性、为研究这一现象设计人机团队任务的挑战以及共同学习可能成功的条件。这项研究有助于我们了解人类如何与人工智能伙伴一起学习以及从人工智能伙伴那里学习,我们设计有意识学习 (LDP) 的提议为未来人机团队的应用提供了方向。

机器人工程师
随着可观的3D打印的出现,可以按需构建自定义制造的工具,并且添加了低成本的计算机,传感器和执行器,甚至可以构造自定义的机器人。当需要自主系统在新环境中操作或执行新任务时,此功能特别有用。例如,在城市搜救和救援中,通常很难预见如何获得访问权限,以及机器人完成其任务需要什么样的配置。同样,在敏捷制造中,为新任务重新装修自动化设备也消耗了大量资源。降低这一成本使制造商能够对市场变化更容易和有效地做出反应。在本文中,我们描述了用于自动设计和构建3D可打印工具的方法,这些工具可以由机器人用于响应新颖和不断变化的环境和任务。设计源自ILP系统学到的规格。响应机器人在紧急情况下越来越多地使用[5]。目前,他们主要被送入灾难现场,以进行初步监视,然后才进入危险的环境。通常,不可能事先知道机器人需要什么功能来完成其任务。例如,在灾难网站(例如倒塌的建筑物)中获得并在灾难网站上工作是有问题的,因为它们包含意外的障碍,损坏的基础设施,狭窄的空间等。因此,很难预见应该如何配置机器人。而不是使用3D打印,可以创建适合灾难网站独特情况的自定义工具,甚至可以制造完整的机器人[6]。
repositórioiscte-iul
用户界面(UI)正在从渴望注意力转变为互动时用户的需求。为机器人远距离开发的接口可能特别复杂,通常会显示大量信息,这可能会增加损害操作员性能的认知超负荷。本文介绍了与六名参与者评估的生理学细心用户界面(PAUI)原型的开发。一项关于城市搜救和救援(USAR)操作的案例研究,尽管拟议的方法旨在通用,但使用了totopopopoping机器人。机器人考虑的提供了过于复杂的图形用户界面(GUI),该界面不允许访问其源代码。这代表了机器人仍在使用时的经常性和挑战性的情况,但是不再提供技术更新,通常意味着它们放弃。该方法的主要贡献是可以回收旧系统的同时改进可用于最终用户的UI并考虑输入其生理数据。所提出的PAUI分析生理数据,面部表情和眼动,以对三种精神状态进行分类(休息,工作量和压力)。然后,通过回收现有的GUI来组装细心的用户界面(AUI),该GUI根据预测的心理状态进行动态修改,以在精神苛刻的情况下提高用户的重点。初步用户评估的结果表明,由于受试者的数量减少,尽管没有统计学意义,但PAUI使用的有用性和易用性的趋势。除了利用先前存在的GUI的拟议的Pauis的新颖性外,这项工作还助长了一个用户实验的设计,该实验包括精神状态诱导任务,这些任务成功触发了高和低认知过载状态。

多人系统中的高级溶剂和挑战...
1。一般介绍近几十年来,对环境和人类社区造成不可逆转的损害的自然灾害数量已大大增加。此类灾难的例子包括地震,洪水,火灾和海啸,所有这些都对人类安全构成了威胁,并阻碍了危险救援行动的影响。不可能避免此类事件,因此有效的灾难管理系统的定义至关重要。要提高其有效性,这种系统必须拥有有关受灾难影响的人的全面信息,以及有关事件的位置和性质的精确细节。此信息对于决策和急救团队的组织非常宝贵。在另一种情况下,机器人已被证明是被认为是沉闷,肮脏和危险的操作中必不可少的工具。这主要是由于它们能够达到人类危险或无法接近的地方,例如有毒或极端热的环境,从而提高了救援团队的安全性和运营效率。此外,在灾难发生几分钟之内的快速响应是一个重要的目标,并且使用官方机器人系统对此目标至关重要。在美国纽约的9/11袭击中,机器人在城市搜救和救援(USAR)行动中的首次使用可以追溯到2001年9月。尽管机器人系统在灾难响应阶段的重要性越来越重要,但它们的部署通常发生在灾难发生后约6.5天,超过了死亡率曲线的48小时高峰,如[1]报道。随后发生的事件,例如2005年的La Conchita Landslide,2005年的卡特里娜飓风和威尔玛飓风,2007年的Midas Gold Mine倒闭,2011年的福岛核电站灾难以及2011年的Tohoku Eartrequake在搜索和救援行动中使用了机器人的使用。延迟可以归因于各种因素,包括技术挑战。这些机器人系统的主要操作模式是遥控器,它需要高水平的专业知识和专业培训,为Human Operators提供。因此,只有少数专家能够操作这些机器人系统,从而大大限制了其潜在应用。几个瓶颈进一步限制了机器人系统在救灾中的使用。这些包括机器人的智能,能量和流动性的有限可靠性和自治,整合不足

抗震加固 - 盖蒂中心
洛杉矶是盖蒂保护研究所的所在地,对地震的破坏力非常熟悉。在过去的五十年中,1971 年和 1994 年发生的两次大地震导致该市人员伤亡和大面积破坏。盖蒂中心是盖蒂保护研究所及其姊妹项目的所在地,于 1994 年正在建设中;当年发生的 6.7 级地震暴露了现场已经竖立的钢接头的脆弱性,并进行了加固以降低该中心未来遭受地震破坏的可能性。在那次地震发生前的几年,盖蒂保护研究所实际上已经开始了一项抗震加固研究计划,重点是建筑文化遗产。1990 年,盖蒂保护研究所启动了两个项目,研究和开发为地震地区具有历史和文化意义的建筑提供抗震稳定的方法。第一个项目是盖蒂抗震土坯项目 (GSAP),该项目研究了现有土制结构加固方法的替代方案,并开发了以合理成本提供抗震保护的方法,同时大大保留了历史土坯的真实性。第二个项目在前南斯拉夫的马其顿共和国进行,重点研究了用石头和砖块建造的拜占庭教堂的抗震加固。本期《保护展望》的专题文章介绍了该研究所目前的抗震加固项目 (SRP),该项目源于 GSAP。SRP 以 GCI 的专业知识和多年的研究为基础,为土制建筑遗产的抗震加固制定方法和标准。该项目目前在秘鲁开展,得到了 GCI 理事会的支持和遗产保护之友的协助,是秘鲁天主教大学科学与工程学院前院长 Daniel Torrealva 和负责管理 SRP 的 GCI 高级项目专家 Claudia Cancino 撰写的文章的主题。该项目与秘鲁文化部和秘鲁天主教大学合作开展,正在开发低技术、经济高效的抗震加固技术,并就易于实施的维护计划提出建议,这些计划可以共同提高土制建筑的抗震性能,同时保护历史建筑。Zeynep Gül Ünal 教授是 ICOMOS 风险准备委员会和土耳其 GEA 城市搜救队的成员,他研究了可以更好地保护历史建筑免受地震破坏的政策和立法变化。在他们的文章中,保护建筑师 Stephen Kelley 和 Rohit Jigyasu 以 1987 年具有里程碑意义的盖蒂出版物《两次地震之间:地震带中的文化财产》(作者:Sir Bernard Feilden)为起点,研究了接下来几十年取得的进展以及需要做更多工作的领域。在他的文章中,土木工程师兼教授 Paulo B. Lourenço 探讨了与降低历史建筑对地震活动的脆弱性相关的研究进展。最后,本期圆桌会议包括 Androniki Miltiadou-Fezans、Claudio Modena 和 John Ochsendorf,他们都是建筑文化遗产领域经验丰富的工程师;他们一起努力解决与建筑遗产保护工程师的角色、职责和培训相关的问题。总而言之,这份 GCI 简报概述了在减少地震活动对建筑遗产造成的风险方面取得的一些进展,同时也指明了我们需要前进的一些方向。