XiaoMi-AI文件搜索系统
World File Search System壁架

内陆架浅水内部钻孔沿岸变异性
摘要:使用 42 个系泊设备的温度和速度测量值来研究非线性内孔在穿过加利福尼亚中部内陆架时沿岸的变化。系泊设备于 2017 年 9 月至 10 月部署在 Point Sal 岬角近海。区域覆盖范围为 ; 沿岸 30 公里和 ; 沿岸 15 公里,跨越 9-100 米水深。除了调节区域分层的潮下过程外,内孔还产生了复杂的时空分层变异模式。在 50 米等深线处,内孔沿岸连续,长度约为数十公里,但锋面连续性的长度尺度在 25 米等深线处减小到 O(1 公里)。发现深度平均、带通滤波(从 3 分钟到 16 小时)的内部钻孔动能 (KE IB ) 沿钻孔前沿是不均匀的,即使是沿岸连续钻孔也是如此。沿钻孔 KE IB 变化的模式因每个钻孔而异,但 2 周平均值表明 KE IB 在 Sal 点附近通常最强。钻孔前方的分层影响钻孔的振幅和沿岸演变。数据表明,沿岸分层梯度可能导致钻孔在不同的沿岸位置以不同的方式演变。观察到三种潜在的钻孔命运:1) 钻孔完整地过渡到 9 米等深线,2) 钻孔被更快的后续钻孔超越,导致钻孔合并事件,以及 3) 当上游跃层接近或低于中间深度时,钻孔消失。每个系泊处每小时的分层图和连续钻孔的估计位置表明,单个内部钻孔可显著影响后续钻孔的波导。

mwbbes-212 |数据表| BBU货架CP电源架
订单编号说明链接链接到数据表MWBBU118-4000-A BBU(电池备份单元) https://power.murata.com/datasheet?/data/power/mwbb-bcu.pdf mwoces-192 19” 2U,OCP Implociant Power Shelf https://power.murata.com/data/data/data/data/data/data/data/data/data/data/data/data/data/data/data/data/data/poppoil/popely/mwoces-192.pdf mwoces-poreiant ocp mwoces-ocp ocp 21' https://power.murata.com/datasheet?/data/power/mwoces-211.pdf mwbb-kit-2安装套件-MWBB-KIT-3 BUSBAR链接套件-MWBB-KIT-MWBB-KIT-5安装套件-MWBB-KIT-8
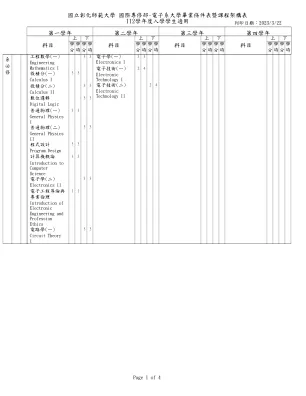
112学年度入学学生适用...
可穿戴系统设计组合语言33 3组装语言线性代数3 3线性代数讯号与系统3 3信号和系统资料结构33 3数据结构近代物理33 3 3 3 3 3 3 3 3 3

海上自卫队补给本部会计部授权支出和负担官……
投入运行前 8 天 — 2.2 附件标准等事项 2.2.1. 机台 机台应符合下列规定: a) 安装位置为天花板上图示的三个位置,作为电动葫芦的底座(见附图6)。是...
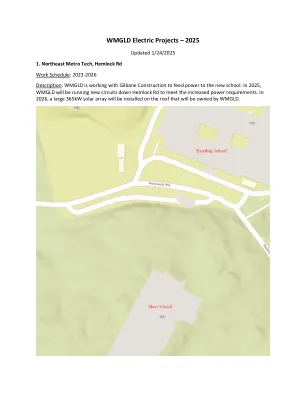
WMGLD 电力项目 – 2025 年
描述:WMGLD 目前正在 Hemlock Rd 的新站点安装发电机和电池存储系统。这些将作为两所新学校的备用发电设备,并用于调峰。2025 年,WMGLD 将在站点安装所有地基和导管,需要拆除壁架。我们还将与 Lightshift Energy 合作安装电池存储系统。2026 年,我们的其余设备将安装完毕并投入使用。

新闻稿_DGA 向陆军交付第 24 架 A400M Atlas……
2024 年 6 月 25 日,装备总局 (DGA) 接收的第 24 架 A400M 阿特拉斯运输机加入奥尔良空军基地 (45)。A400M 由飞机制造商空中客车公司生产,受益于众多技术进步,特别是在无能见度或非常恶劣的天气条件下着陆时。其空投能力使其能够通过重力和弹射进行混合投掷负载,以及通过轴向出口连续投掷装备以及通过轴向和横向出口连续投掷伞兵。

一对多:人机界面可让单个操作员控制多架无人机
本文描述并回顾了解决人机界面挑战的研究和潜在解决方案,使单个操作员能够通过一个界面控制多架无人机 (UAV)。作为一个系统,这也被称为多机器人系统 (MRS)。MRS 应用于多个领域,如环境监测 [1]、搜索和救援 [2, 3]、安全 [4]、机器人配送的监督控制以及探索性医疗保健中的微型和纳米机器人群 [5]。单个操作员同时控制多个机器人的优势(称为一对多关系)是改善资源分配、时间成本、稳健性和现实世界任务的其他方面 [6]。然而,由于单个操作员的认知工作量增加,增加机器人数量并不一定会提高系统性能 [7]。早期模型描述了单个操作员使用基于忽视容忍度的扇出控制的机器人数量、当操作员忽视机器人时机器人的效率如何随时间下降,以及交互时间、任务切换、建立上下文、计划和将计划传达给机器人所需的时间 [8]。该模型已扩展到包括等待时间和性能指标,以模拟给定任务约束的扇出水平 [9]。

自动架:紧凑设备的精确X射线测量
fe fe fe ni ni ni ni ni mg平均平均值(UM)2.331 12,375 52.090 2.072 12.185 50.658 45.517 STDEV(UM)0.008 0.027 0.143 0.143 0.008 0.008 0.008 0.027 0.027 0.252 0.252 0.062 0.062 STDEV(%) 0.22%0.50%0.14%fe fe fe ni ni ni ni ni mg平均平均值(UM)2.331 12,375 52.090 2.072 12.185 50.658 45.517 STDEV(UM)0.008 0.027 0.143 0.143 0.008 0.008 0.008 0.027 0.027 0.252 0.252 0.062 0.062 STDEV(%) 0.22%0.50%0.14%
用于表面裂缝检测的爬壁机器人设计......
摘要:本研究重点设计一种爬墙机器人,用于桥梁、旧混凝土建筑、隧道和水坝等建筑结构的无损检测。机器人的主要目标是确定建筑结构上的表面裂缝。对于粘合机制,采用通用真空吸力机制,可爬过水平和垂直表面。图像处理用于分析使用相机捕获的图像。集成控制和相机固定模块的树莓派适用于系统的图像捕获和控制系统。图像应作为系列发送到计算机进行读取。图像处理算法应用于捕获的图像。应用图像预处理、分割、灰度转换、阈值和边缘检测等算法。使用不同的边缘检测算子,如 canny、sobel、roberts、prewitt 和 log 进行表面裂纹检测。使用图像处理算法估计裂纹参数,即分段裂纹的面积。并以像素值的形式获得输出,然后将其转换为相应的尺寸。关键词:攀爬机器人、气动机构、图像处理、裂纹检测。