XiaoMi-AI文件搜索系统
World File Search System外窗
1.6μm窗口中的水蒸气外国 -
% 5702.13 1.12(11)×10 -25 48.5 17.9 33.6 5715.30 1.07(16)×10 -25 49.1 17.3 33.6 5752.04 2.88(95)×10 -26 61.0 21.3 17.7 5816.60 2.60(28)×10 -26 29.4 37.3 33.3 5842.20 1.61(30)×10 -26 28.8 39.7 31.5 1.90(30)×10 -26 2.20(30)×10 -26 5875.20 2.42(24)×10 -26 30.5 29.3 40.3 40.2 2.33(24)×10 -26 5905.72 1.33(24) 1.76(20)×10 -26 1.53(20)×10 -26 5933.75 1.03(10)×10 -26 21.3 41.3 41.5 37.2 1.21(10)×10 -26 1.14(10)×10 -26 1.17(10)×10 -26 1.17(10)×10 -26 1.17(10 -26 1.17(10)×10-26×10-26×10-26×10-26×10-25(10-25) 1.18(10)×10 -26 6022.06 7.4(15)×10 -27 25.9 30.6 43.5 6120.45 7.0 7.0(12)×10 -27 14.6 34.0 51.4 6224.09 3.5(12)3.5(12)×10 -27 17.9 36.6 36.6 36.6 45.5 6369.00 a <5×7 636.00 a <5×7 67 636.6369.00 a <5×27 67 636.636.00 a <5.5×7 67 66.6 34.6 6.9(65)×10 -27 85.4 5.9 8.7 6562.18 9.1(40)×10 -27 79.4 8.0 12.6 6637.62 4.7(14)×10 -26 71.8 6.9 21.9 21.3 21.3 257
RPD 办公室技术标准 2019 - 租户改进 - 修订版 2
外窗和内窗的窗帘应为商用 25 毫米(1 英寸)水平铝制百叶窗,可调节升降和叶片倾斜度,配有透明防滑倾斜杆和钢丝绳锁。验收标准:Levolor(Contract)Monaco 或 Abbey Classics Supreme)或同等标准。例外:租赁空间:外窗窗帘应与房东商定,以确保外观美观统一。为避免电脑屏幕眩光,请勿为外窗应用选择高反射性饰面。

辅仁大学外语学院生成式AI使用原则说明
■ 如果您提供最少努力的提示,您将获得低质量的结果。您需要改进提示以获得良好的结果。这需要努力。■ 不要相信它说的任何话。如果它给您一个数字或事实,除非您知道答案或可以向其他来源核实,否则假设它是错误的。您将对该工具提供的任何错误或遗漏负责。它最适合您理解的主题。■ AI 是一种工具,但您需要承认使用它。请在任何使用 AI 的作业末尾附上一段,解释您使用 AI 的用途以及您使用什么提示来获得结果。不这样做违反了学术诚信政策。■ 请仔细考虑此工具何时有用。如果它不适合案例或情况,请不要使用它。

企业相关产业废弃物收集运输案件1起
2024年3月27日 — 1 范围 本规范规定了日本航空自卫队滨松空军基地的业务相关工业废弃物的收集和运输。 2 参考文献 2.1 总则 本规范引用了下列文献:
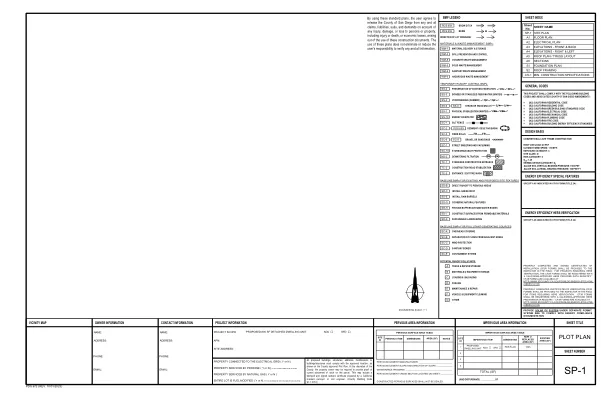
平面图 (11x17)
外窗、外玻璃门、外门内的玻璃开口、外车库门内的玻璃开口以及外结构玻璃贴面应符合下列要求之一:(选择一项)A. 多窗格玻璃,其中至少有一块钢化玻璃符合第 2406 节安全玻璃的要求,并且任何由乙烯基材料制成的玻璃框架都应具有焊接角、联锁区域的金属加固,并且经过 AAMA/WDMA/CSA 101/IS2/A40 认证。B. 至少 20 分钟防火等级。C. 满足 SFM 标准 12-7A-2 的性能要求
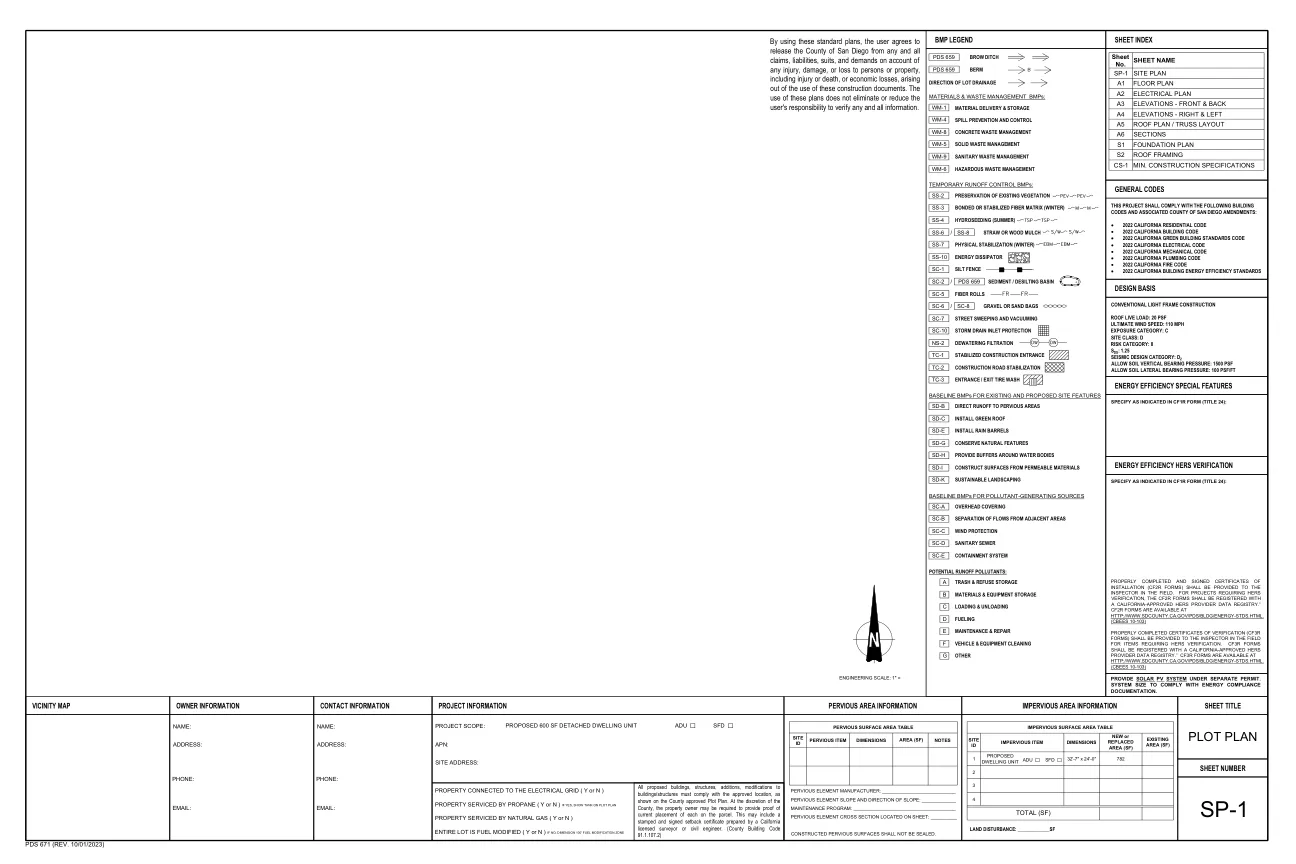
平面图 (24x36)
外窗、外玻璃门、外门内的玻璃开口、外车库门内的玻璃开口以及外结构玻璃贴面应符合下列要求之一:(选择一项)A. 多窗格玻璃,其中至少有一块钢化玻璃符合第 2406 节安全玻璃的要求,并且任何由乙烯基材料制成的玻璃框架都应具有焊接角、联锁区域的金属加固,并且经过 AAMA/WDMA/CSA 101/IS2/A40 认证。B. 至少 20 分钟防火等级。C. 满足 SFM 标准 12-7A-2 的性能要求

房间空调,壁挂式,用于加热和冷却,14 个榻榻米,其他 2 个单位
2024年10月18日——国防部部长官房卫生监察长、国防政策局局长、国防采购、技术和后勤局局长(以下简称“国防部提名暂停局”)……


房间空调,壁挂式,用于加热和冷却,18 个榻榻米,1 个室外
4天前 — 与根据前款规定目前被暂停投标资格的人有资本或个人关系,且不从事与该人同类商品的买卖、购买、销售或制造的人。或与国防部签订服务承包合同...

使用Snell窗口中的极化模式的生物启发的水下导航
针对水下无人车辆(UUV)的自主导航能力的要求,提出了一种基于Snell窗口内极化模式的水下导航的新型仿生方法。受到生物的启发,极化导航是一种无卫星的导航计划,并且有很大的潜力在水中使用。但是,由于水下环境复杂,是否可以实现UUV两极化导航令人怀疑。为了说明水下极化导航的可行性,我们首先建立了水下极化模式的模型,以证明Snell窗口内的水下极化模式的稳定性和可预测性。然后,我们基于开发的极化信息检测设备进行水下标题确定的静态和动态实验。最后,我们获得了水下极化模式,并在不同的水深度进行跟踪实验。水下极化模式的实验结果与模拟一致,这证明了所提出的模型的正确性。在5 m的水深下,跟踪实验的平均角度和位置误差分别为14.3508°和4.0812 m。可以说明水下两极化导航是可以实现的,精度可以满足UUV的实时导航要求。这项研究促进了水下导航能力和海洋设备的发展。