XiaoMi-AI文件搜索系统
World File Search System定位系统

DIFAR 定位系统的准确度和精确度
蓝鲸的被动声学定位一直是南极蓝鲸研究的重要组成部分,并可能成为未来作为南大洋研究伙伴关系南极蓝鲸项目一部分进行的研究的关键工具。本文件介绍了测量基于声纳浮标的定位系统的准确度和精确度的方法。这些方法可用于在实时跟踪鲸鱼的过程中现场“校准”每个声纳浮标中的磁罗盘。在这里,我们比较了使用不同仪器在不同航行中收集的几个不同数据集的定位准确度和精确度。本文件还包括有关声纳浮标定位系统各个组件校准的其他信息,并就未来开发和部署基于声纳浮标的鲸鱼被动声学定位系统提供建议。
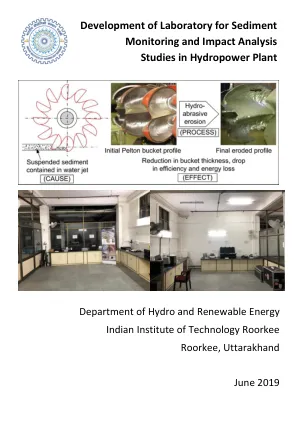
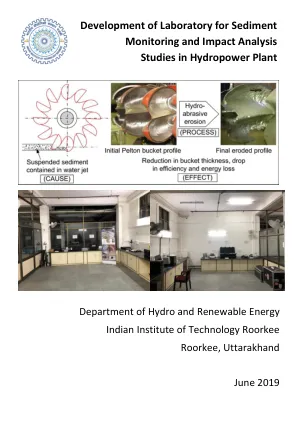
沉积物监测与分析实验室的发展...
相机、定位系统、附加视野、Geomagic Design X 软件制造商:Carl Zeiss Optotechnik GmbH,德国 测量参数:对涡轮机和其他工厂组件进行 3D 扫描,以了解其侵蚀情况并对扫描组件进行分析
沉积物实验室的发展... - mnre.gov
相机、定位系统、附加视野、Geomagic Design X 软件制造商:Carl Zeiss Optotechnik GmbH,德国 测量参数:对涡轮机和其他工厂组件进行 3D 扫描,以了解其侵蚀情况并对扫描组件进行分析

使用带信标的 BLE 为运动中的用户提供高保真室内导航系统
摘要 由于缺乏可用的 GPS 信号,室内定位和微定位系统变得复杂。蓝牙和 WiFi 填补了这一空白,但这些系统在用户移动时难以保持准确性。使用平滑算法和运行 iBeacon 软件的均匀分布的 BLE 信标,搭配定制设计的 iOS 应用程序,在用户移动时可实现 2 米的精度。本文介绍了以下研究成果:1) 一种使用低成本 BLE 信标的新型室内定位和导航预测系统,当用户以步行速度移动时,其精度为 2.2 米;2) 一种通用室内微定位系统,可以轻松快速地部署到新环境中(数小时内);3) 5 种平滑算法的比较和性能分析;4) 一种架构模型,其他研究人员可以通过它扩展我们在室内定位和导航方面的工作。

ART SpA - 公司简介
✓ 从车辆 CAN 网络采集数据 ✓ GNSS 定位系统 ✓ 从 2 个麦克风采集音频 ✓ 从 2 个高清摄像头 (内部/外部视图) 采集视频 ✓ 用于连接车辆信息娱乐系统的音频和视频输出 ✓ WiFi 用于实时向副驾驶/教练传输数据 ✓ 适合汽车使用
汽车 - Pneumax Spa
Pneumax 提供全面的夹紧装置、枢轴装置、销钉套件以及夹持器和完整的多轴定位系统。该产品由专业技术人员团队开发,旨在确保最大的可靠性、精度和可重复性,符合最新的国际安装标准。特别注重能源效率,通过专利设计提供市场上最大的节能解决方案。

美国宇航局小型航天器技术计划
地月自主定位系统 (CAPS) 操作概念图。CAPS 是一种创新的航天器到航天器导航解决方案,将在目前绕月运行的 CAPSTONE 任务中演示。CAPS 预计将使未来的航天器能够确定其相对于月球的位置,而无需完全依赖地球的跟踪。图片来源:Advanced Space, LLC

可见光定位技术的当前趋势
自主导航等等。尽管全球定位系统 (GPS) 已成为室外定位系统最受欢迎的示例之一,但它无法在室内环境中提供高精度定位,因为 GPS 信号(即射频 (RF))无法很好地穿透建筑物墙壁,从而导致破坏性误差,无法在矿井和地下环境中使用 [1-3]。目前,已有多种不同技术被用于 IPS,例如超声波 [4]、无线电波 [5]、[6]、射频识别 (RFID) [7]、[8]、Zigbee、蓝牙 [9] 和超宽带 (UWB) [10]。基于超声波的室内定位系统 (IPS) 具有较大的测距和定位误差(精度为 10 厘米范围),因为其波长通常较大,并且声速受环境温度的影响 [11]。基于 RF 的定位面临多个问题,包括电磁 (EM) 辐射,这限制了基于 RF 的系统在某些领域(即医疗等)的使用。此外,RF 信号 (i) 受室内环境中多径效应的影响,从而增加定位误差;以及 (ii) 受可用频谱的限制,而频谱非常拥挤。RFID 和 UWB 借助专用基础设施和特殊设备识别定位信号。其他定位方法,如基于 Zigbee 和蓝牙的系统,容易受到信号源波动的影响。

HP56X UL913-手册-630x285mm-EN-20241010.cdr
该对讲机拥有一系列主动安全措施。它可以智能检测电池是否防伪防爆,防止使用非防伪非防爆电池带来的火灾和爆炸风险。此外,该对讲机还提供单独作业和紧急报警功能,让您的人员在紧急情况下快速呼救,同时对讲机可以将其位置发送到指挥中心,以便借助 GPS 和 GLONASS 定位系统轻松准确地找到您的人员。

基于被动射频信号强度分布的三维室内定位
摘要 — 近年来,室内定位系统 (IPS) 受到了机器人、导航、人机交互等许多研究领域的关注。然而,基于无源射频 (PRF) 技术的 IPS 仍然很少见。本文提出了一种基于接收信号强度 (RSS) 分布和高斯过程回归 (GPR) 的三维 (3D) IPS。传统的基于 RSS 的定位系统具有已知频率的发射器,而在提出的 PRf 机会信号 - 3D IPS (PRO-3DIPS) 中,系统既不部署新的发射器,也不使用任何发射器的先验知识。此外,PRO-3DIPS 集成了多个机会信号 (SoOP) 源、阴影、衰落,还可以捕获场景特征。在 3D 空间中基于 PRF 的 RSS 分布的数据收集和分析实现了 3D 定位功能。应用并比较了三种方法,以找到受场景影响最大的频带,以实现最佳定位性能,并用于估计 RSS 分布。 RSS 分布是通过在场景中测量固定网格上的 PRF 频谱来估计的。利用 RSS 分布,GPR 可以精确定位接收器位置。在实验场景中收集了 90 个网格位置的 RSS,每个位置有 100 个样本。实验结果表明,当