XiaoMi-AI文件搜索系统
World File Search System定向系统

无框架立体定向系统针对非人类灵长类动物皮层下核的可行性和性能
目的尽管对其作用机制尚不了解,但深部脑刺激 (DBS) 是治疗不同神经系统疾病的有效方法。非人灵长类动物 (NHP) 的使用在推动该领域的发展方面一直具有重要意义,并且为揭示 DBS 的治疗机制提供了独特的机会,为优化当前应用和开发新应用开辟了道路。为了提供参考,使用 NHP 的研究应使用合适的电极植入工具。在本研究中,作者报告了使用市售无框立体定向系统 (微靶向平台) 瞄准 NHP 中不同深部脑区域的可行性和准确性。方法在七个 NHP 的丘脑底核或小脑齿状核中植入 DBS 电极。为每只动物设计一个微靶向平台并用于引导电极的植入。每只动物在术前都获取了影像学研究数据,随后由两名独立评估人员进行分析,以估计电极放置误差 (EPE)。同时还评估了观察者之间的差异。结果分别估计了 EPE 的径向和矢量分量。EPE 矢量的大小为 1.29 ± 0.41 毫米,平均径向 EPE 为 0.96 ± 0.63 毫米。观察者之间的差异可以忽略不计。结论与传统的刚性框架相比,这些结果表明,与传统的刚性框架相比,该商用系统适用于增强 DBS 导线在灵长类动物脑内的手术插入。此外,我们的研究结果开辟了在灵长类动物中进行无框架立体定位的可能性,而无需依赖基于术中成像的昂贵方法。
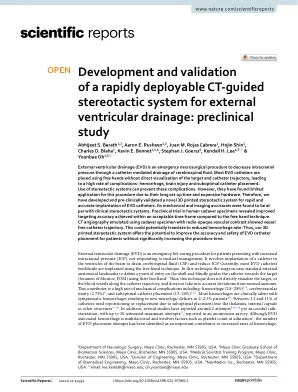
临床前
脑室外引流 (EVD) 是一种紧急神经外科手术,通过导管介导的脑脊液引流来降低颅内压。大多数 EVD 导管都是用自由手放置的,无法直接看到目标和导管轨迹,导致并发症发生率高 - 出血、脑损伤和导管放置不理想。使用立体定向系统可以预防这些并发症。然而,由于它们的设置时间长且硬件昂贵,它们在该手术中的应用有限。因此,我们开发了一种新型 3D 打印立体定向系统,并在临床前进行了验证,以快速准确地植入 EVD 导管。其机械和成像精度与临床立体定向系统相当。在人类尸体标本中进行的临床前试验表明,与自由手技术相比,在可接受的时间范围内实现了更高的靶向精度。使用不透射线血管造影剂模拟的尸体标本 CT 血管造影显示了无血管导管轨迹。这可能意味着出血率降低。因此,我们的 3D 打印立体定向系统可以提高患者 EVD 导管放置的准确性和安全性,而不会显著增加手术时间。
残留耳廓运动活动指示人类听觉注意力的方向
摘要 与狗和猫不同,人类在将注意力集中在新颖、突出或与任务相关的刺激上时不会将耳朵指向前方。然而,人类可能保留了退化的耳廓定向系统,该系统作为大脑中的“神经化石”存在了大约 2500 万年。与这一假设一致,我们证明了听觉注意力的方向反映在退化耳廓运动系统内肌肉的持续电活动中。表面肌电图 (EMG) 取自移动耳廓或改变其形状的肌肉。为了评估反射性、刺激驱动的注意力,我们在四个不同的侧面位置呈现来自扬声器的新声音,同时参与者默默阅读他们面前的无聊文本。为了测试自愿的、目标导向的注意力,我们指示参与者听其中一个扬声器发出的短篇故事,同时忽略另一侧相应扬声器发出的竞争故事。在这两个实验中,EMG 记录都显示,在关注刺激的一侧的耳朵上活动较大,但模式略有不同。向上运动(竖起)仅在自愿定向时根据侧向注意力焦点而有所不同;耳廓上侧边缘向后折叠仅在反射定向时表现出这种差异。人类存在耳廓定向系统,并且可以通过实验获得,这为基础科学和应用科学提供了机会。

考虑三维飞行器挠度角的机载分布式POS传递对准方法
摘要 为满足多点运动参数测量的需求,机载分布式定位定向系统(POS)依赖于高精度主系统到从系统的传递对准来获取所有点的高精度运动参数。分布式POS的关键问题是确定一种适当处理飞行器挠曲的方法,实现高精度传递对准。本文首先分析了飞行器挠曲对机载对地观测传递对准精度的影响,在此基础上建立了考虑三维挠曲角的传递对准误差模型,提出了一种基于参数辨识无迹Rauch-Tung-Striebel平滑器(PIURTSS)的传递对准。仿真结果表明,基于PIURTSS的传递对准方法可有效提高估计精度。
一种用于机载分布式 POS 的传递对准方法...
摘要 机载分布式定位定向系统(POS)可以满足多点运动参数测量的需求。它依赖于从高精度主系统到从系统的传递对准来获得所有点的高精度运动参数。分布式POS的一个关键问题是确定适当处理飞行器挠曲的方法,实现高精度传递对准。本文首先分析了飞行器挠曲对机载对地观测传递对准精度的影响。在此基础上,建立了考虑三维挠曲角的传递对准误差模型,并提出了一种基于参数识别无味Rauch-Tung-Striebel平滑器(PIURTSS)的传递对准。仿真结果表明,基于PIURTSS的传递对准方法有效提高了估计精度。

发展性认知神经科学
人类行为得到了目标定向(基于模型)和习惯性(无模型)决策的支持,每个决策的灵活性,准确性和计算成本都不同。习惯和定向系统之间的仲裁被认为是由称为元控制的过程调节的。但是,这些系统如何出现和发展仍然知之甚少。最近,我们发现,尽管5至11岁的儿童表现出了基于模型的决策的强大签名,但在此发展期间增加了,但在表现上显示了个体差异。在这里,我们检查了儿童期基于模型的决策和元控制的神经认知基础,并将研究重点放在执行功能,流体推理和大脑结构上。6-13岁之间的69名参与者完成了两步决策任务和广泛的行为测试电池。44个参与者的子集还完成了结构磁共振成像扫描。我们发现,元控制的个体差异与抑制任务的性能和dorso侧侧前额叶,颞叶和上山皮层的厚度的个体差异特别相关。这些大脑区域可能反映出对元控制至关重要的认知过程的参与,例如认知控制和上下文处理。
计划计划指南
教职员工渴望在您的学生开始计划和准备下一个学年的过程中为他们提供支持。本计划规划指南旨在在您绘制下一步时为您提供帮助。本文档展示了Tallmadge高中的广泛课程和灵活性。家庭可用的信息量从未有所更大。话虽如此,该文件是官方经营标准,其后是校长,学校辅导员和其他学校领导者。 本文档中的信息每年根据本地和州倡议对本文档进行审查和更新。 我鼓励您在方便的情况下进行审查。 Tallmadge高中的任务很简单。 我们努力看到每个毕业生在完成高中要求后成功就业,入学或入伍(3E)。 准备和支持我们的学生绝非易事。 学生比以往任何时候都更容易获得更多的选择。 未来的决定应与所选的“ E”保持一致,无论是使用,注册还是入伍。 最近,塔尔马奇市学校踏上了一段旅程,清楚地确定了所有被称为“毕业生肖像”的学生的属性,并希望您发现这台北极星很有用。 此外,该地区清楚地定义了“定向系统”中的利益相关者,主要的教学策略和指导原则。这两个文件都是我们学生经验的核心。 的机会都在等待任何入学的学生。话虽如此,该文件是官方经营标准,其后是校长,学校辅导员和其他学校领导者。本文档中的信息每年根据本地和州倡议对本文档进行审查和更新。我鼓励您在方便的情况下进行审查。Tallmadge高中的任务很简单。我们努力看到每个毕业生在完成高中要求后成功就业,入学或入伍(3E)。准备和支持我们的学生绝非易事。学生比以往任何时候都更容易获得更多的选择。未来的决定应与所选的“ E”保持一致,无论是使用,注册还是入伍。最近,塔尔马奇市学校踏上了一段旅程,清楚地确定了所有被称为“毕业生肖像”的学生的属性,并希望您发现这台北极星很有用。此外,该地区清楚地定义了“定向系统”中的利益相关者,主要的教学策略和指导原则。这两个文件都是我们学生经验的核心。的机会都在等待任何入学的学生。可以提供强大的核心课程,高级安排课程,选修课和各种职业和技术教育计划。现在就采取行动您的个人目标只会在将来对您有所帮助。我想强调的是,这本文件存在于父母,看护人或监护人中,以支持您的学生在高中旅程中。明智地反映,考虑和审查您的学生的选择,因为这可能会对未来的机会产生重大影响。有关其他信息,请寻找我们咨询办公室提供的资源。

单视图和多视图机载 SAR 定位误差的比较分析和多视图机载 SAR 最佳定位的航线规划
摘要:机载合成孔径雷达(Airborne Synthetic Aperture Radar,Airborne SAR)利用机载定位定向系统(POS)获取的飞行器飞行参数以及飞行器与目标的相对位置信息,对重点目标及区域进行精确定位。飞行过程中,飞行器会因为大气湍流等原因偏离理想飞行路径,导致计算结果与实际目标位置出现偏差。为了提高目标定位精度,需要研究飞行器运动误差对目标定位误差的影响。本文从线性距离-多普勒算法(RDA)的角度探讨了单视机载SAR的定位精度,并在多视机载SAR定位模型的基础上,推导了多视机载SAR定位误差传递模型。在此基础上,详细分析了影响两种定位方法定位精度的主要因素,定量揭示了多视角机载SAR定位方法较单视角机载SAR定位方法提高目标定位精度的机理,解决了多视角机载SAR优化定位的航向规划问题。研究成果可为定位误差影响因素分析及机载SAR定位误差校正提供理论支撑。
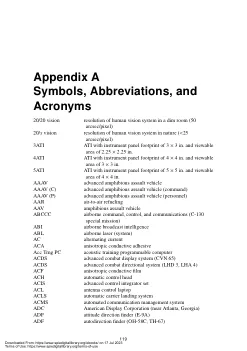
附录 A 符号、缩写和首字母缩略词
昏暗房间中人眼视觉系统的 20/20 视觉分辨率(50 角秒/像素) 自然界中人眼视觉系统的 20/x 视觉分辨率(< 25 角秒/像素) 3ATI 仪表板占用空间为 3 × 3 英寸、可视区域为 2.25 × 2.25 英寸的 ATI 4ATI 仪表板占用空间为 4 × 4 英寸、可视区域为 3 × 3 英寸的 ATI 5ATI 仪表板占用空间为 5 × 5 英寸、可视区域为 4 × 4 英寸的 ATI AAAV 先进两栖攻击车 AAAV (C) 先进两栖攻击车(指挥) AAAV (P) 先进两栖攻击车(人员) AAR 空中加油 AAV 两栖攻击车 ABCCC 机载指挥、控制和通信(C-130 特殊任务) ABI 机载广播情报 ABL 机载激光(系统) AC交流电 ACA 各向异性导电胶 Acc Trng PC 声学训练可编程计算机 ACDS 先进战斗显示系统(CVN 65) ACDS 先进战斗定向系统(LHD 3、LHA 4) ACF 各向异性导电膜 ACH 自动控制头 ACIS 先进控制积分器组 ACL 天线控制笔记本电脑 ACLS 自动航母着陆系统 ACMS 自动通信管理系统 ADC 美国显示公司(佐治亚州亚特兰大附近) ADF 姿态测向仪(E-9A) ADF 自动测向仪(OH-58C、TH-67)
利用术中导航的3D彩色多普勒超声在神经胶质瘤手术中
在儿童中看到,切除时可能可以治愈,而低级神经胶质瘤(WHO II级)主要是在年轻人中看到的,最终会发展为高级神经胶质瘤(3)。大多数神经胶质瘤(55.1%)是IV级的胶质母细胞瘤,其发生率为每100,000(1)。神经胶质瘤疗法的主要基石包括组织学诊断和去除肿瘤,放射治疗和药物治疗的手术(4)。关于适当切除策略的持续辩论,主要是由脑磁共振断层扫描(MRI)(5)和计算机断层扫描(CT)(6,7)的区域内的胶质瘤细胞表现出来的驱动,即使在组织学上正常的大脑区域(8)。几项研究证明了神经瘤手术中切除术的程度(EOR)和残留的肿瘤体积是影响患者结果的重要因素,因为它在无进展的生存和整体生存中衡量了(9-12)。因此,在保留神经功能的同时,尽可能多地切除肿瘤是普遍的实践(13)。的先决条件是在神经外科手术过程中病理组织以及雄辩的大脑区域的定位,可以使用神经道系统实现。这些系统通常利用术前成像,对患者进行了注册(14)。术中成像模式,例如计算机断层扫描(ICT)(15-17),磁共振断层扫描(IMRI)(18-20)(18-20)和超声(IUS)(IUS)(21-23)(21 - 23)可以整合到这些系统中,从而提高安全性和准确性。(35)。2003年Keles等。2003年Keles等。除了进行即时切除控制的可能性外,术中成像还可以帮助神经外科医生处理脑转移,这是一种描述的现象,主要是由于脑肿胀,脑脊液减少,减少肿瘤,脑缩回,脑缩回,脑部恢复和吸收后颅骨后颅骨术和颅骨术后(24),24,24,24,24,24,24,,24,24岁。估计大脑变形程度的首次努力可以追溯到1980年代(26)。从那时起,已经进行了各种尝试以解决此问题,包括光学扫描(27)和导航基于指针的表面位移测量(28,29),这是一种具有集成手术显微镜和视频分析(24),IMRI(30,31)和IUS(32 - 34)的立体定向系统(24)。在整个手术过程中已显示出大脑的转移,如Nabavi等人所证明的那样,可以通过串行MRI获取来部分解决。IMRI的主要局限性是其限制可用性,结构要求,时间消耗和高成本(36,37)。这些缺点都不适用于IUS(可以在不明显的外科手术过程中显着中断)进行IUS,如今已广泛可用,使用直接使用且具有成本效益(38)。现代超声系统可以完全整合到神经道设备中(39,40),并能够为神经瘤手术中的切除范围(40,41)和脑变形提供有关切除范围的信息(39)。分析了前后导航的IUS使用IUS的大脑移位测量值的首次描述在1990年代后期发表,当时在术前和术中术中易于识别的易于识别的能够识别的结构(如心室)标记以评估脑部转移(32 - 34)。