XiaoMi-AI文件搜索系统
World File Search System实变

模拟量子变分嵌入分类器
量子机器学习有可能为人工智能提供强大的算法。在量子机器学习中追求量子优势是一个活跃的研究领域。对于目前有噪声的中型量子计算机,已经提出了各种量子-经典混合算法。一种先前提出的混合算法是基于门的变分嵌入分类器,它由经典神经网络和参数化的基于门的量子电路组成。我们提出了一种基于模拟量子计算机的量子变分嵌入分类器,其中控制信号随时间连续变化:我们特别关注的是使用量子退火器的实现。在我们的算法中,通过线性变换将经典数据转换为模拟量子计算机的时变哈密顿量的参数。非线性分类问题所需的非线性纯粹由模拟量子计算机通过最终量子态对哈密顿量控制参数的非线性依赖性提供。我们进行了数值模拟,证明了我们的算法对线性不可分数据集(例如同心圆和 MNIST 数字)进行二分类和多类分类的有效性。我们的分类器可以达到与最佳经典分类器相当的准确度。我们发现,通过增加量子比特的数量可以提高分类器的性能,直到性能饱和并波动。此外,我们的分类器的优化参数数量与量子比特的数量成线性关系。因此,当我们的模型大小增加时,训练参数数量的增加速度不如神经网络快。我们的算法提出了使用当前量子退火器解决实际机器学习问题的可能性,并且它还可用于探索量子机器学习中的量子优势。

基于波导 QED 的变分量子模拟器
在本补充材料中,我们提供了更多细节来支持正文中提出的结果。在 SM1 节中,我们回顾了当波导模式具有带隙时光子介导相互作用可调谐性的物理起源。然后,在 SM2 节中,我们总结了变分量子本征求解算法的关键步骤(SM2 A),描述了所考虑的目标模型的属性(SM2 B),解释了文献中通常使用的不同假设的结构(SM2 C),详细介绍了我们用于获得正文结果的优化协议(SM2 D),并评论了其他可能用于对我们的结果进行基准测试的品质因数(SM2 E)。最后,在 SM3 节中,我们讨论了用于获得正文图 3 的误差模型的细节。还请注意,用于重现手稿结果的所有代码都可以在 https://github.com/cristiantlopez/Variational-Waveguide-QED-Simulators 中找到。

二次量子变分蒙特卡罗
本文介绍了二次量子变分蒙特卡罗 (Q 2 VMC) 算法,这是量子化学中的一种创新算法,可显著提高求解薛定谔方程的效率和准确性。受虚时间薛定谔演化的离散化启发,Q 2 VMC 采用了一种新颖的二次更新机制,可与基于神经网络的假设无缝集成。我们进行了大量的实验,展示了 Q 2 VMC 的卓越性能,在跨各种分子系统的波函数优化中实现了更快的收敛速度和更低的基态能量,而无需额外的计算成本。这项研究不仅推动了计算量子化学领域的发展,还强调了离散化演化在变分量子算法中的重要作用,为未来的量子研究提供了一个可扩展且强大的框架。

变分预测编码下的目标导向行为
摘要 — 心理模拟是目标导向行为的关键认知功能,因为它对于评估行为及其后果至关重要。当给定一个自我生成或外部指定的目标时,通过心理模拟从其他候选中选择最有可能实现该目标的一系列动作。因此,更好的心理模拟会带来更好的目标导向行动计划。然而,开发心理模拟模型具有挑战性,因为它需要了解自我和环境。本文研究了如何通过动态组织自上而下的视觉注意力和视觉工作记忆来在心理上生成机器人的充分目标导向行动计划。为此,我们提出了一种基于变分贝叶斯预测编码的神经网络模型,其中目标导向行动计划由潜在意向空间的贝叶斯推理制定。我们的实验结果表明,出现了具有认知意义的能力,例如对机器人末端执行器(手)的自上而下的自主注意以及无遮挡视觉工作记忆的动态组织。此外,我们对比较实验的分析表明,引入视觉工作记忆和使用变分贝叶斯预测编码的推理机制显著提高了规划充分的目标导向行动的表现。

变分的安全云量子计算
变异量子算法(VQA)被认为是嘈杂的中间尺度量子(NISQ)设备的有用应用。通常,在VQA中,参数化的ANSATZ电路用于生成试验波函数,并且对参数进行了优化以最大程度地减少成本函数。另一方面,已经研究了盲量量计算(BQC),以便通过使用云网络为量子算法提供安全性。执行量子操作能力有限的客户端希望能够访问服务器的量子计算机,并且BQC允许客户端使用服务器的计算机,而不会泄漏客户端的信息(例如输入,运行量子算法和输出)到服务器。但是,BQC设计用于容差量子计算,这需要许多辅助量子位,这可能不适合NISQ设备。在这里,我们提出了一种有效的方法,可以为客户端提供保证安全性的NISQ计算。在我们的体系结构中,仅需要N +1量子位,假设服务器已知Ansatzes的形式,其中N表示原始NISQ算法中必要的量子数。客户端仅在从服务器发送的辅助量子位上执行单量测量,并且测量角可以指定NISQ算法的ANSATZES的参数。无信号原则可以保证客户端选择的参数或算法的输出都不会泄漏到服务器。这项工作为NISQ设备的新应用程序铺平了道路。
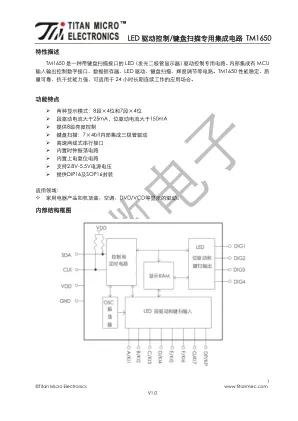
LED 驱动控制/键盘扫描专用集成电路TM1650
接口和TM1650 通信,在输入数据时当SCL 是高电平时,SDA 上的信号必须保持不变;只有SCL 上的 时钟信号为低电平时,SDA 上的信号才能改变。数据输入的开始条件是SCL 为高电平时,SDA 由高变

拉格朗日通信高级实时空分...
考虑到正在进行的国家科学院太阳和空间物理十年调查旨在探索 2050 年前的各种可能性,提高我们的深空通信能力对于未来任务的成功至关重要。包括在每个 L2-L5 航天器上安装一个深空指向通信天线,整个系统可以用作一组固定的深空通信信标,以增强现有的 NASA 深空网络,并可以提供更自主和几乎连续的深空任务监控水平,因为人类开始进一步进入太阳系——无论是通过探索性航天器(如星际探测器)还是通过殖民火星和小行星带。该系统未来的增强功能可以包括利用其他行星的其他拉格朗日点来部署地球第一个行星间通信网络。

使用虚拟原型对压实操作员支持系统进行可用性评估
热拌沥青 (HMA) 压实操作员支持系统 (OSS) 的成功采用在很大程度上取决于系统的可用性,该系统使用传感信息帮助操作员提高操作的安全性和生产率。然而,在压实 OSS 的设计和开发中存在一个重大难题。一方面,以描述性的方式向操作员提供原始传感数据(即温度和压实计数)可能会使操作员认知超负荷,即信息肥胖问题。另一方面,过度处理的数据可以作为规范的压实指导(例如压实轨迹)呈现给操作员,这可能会让操作员感到失去对操作的控制并使其行业专业化。因此,关于压实 OSS 设计和开发的最佳策略一直存在争议。要将可用性方面置于压实 OSS 设计和开发策略的核心,首先,必须从可用性的角度系统地评估各种 OSS 替代方案。然而,传统的可用性测试方法依赖于使用物理原型,这种方法非常耗时,并且在后勤上难以执行。为了解决这个问题,本研究提出并实施了一种虚拟原型 (VP) 方法来分析不同压缩 OSS 的可用性。在这种方法中,开发并利用了一个虚拟现实 (VR) 压缩模拟器来呈现 3 种不同的压缩 OSS 替代方案,它们在提供的支持级别上有所不同,并从最终用户那里获得了反馈。结果表明,从用户的角度来看,与描述性和规范性系统相比,具有压缩优先级的半指导压缩 OSS 更受青睐。用户倾向于将这种级别的支持视为一种中间解决方案,它为他们提供了一种实时策略(重新)开发的方法,而不会损害他们对流程的控制。事实证明,VR 模拟器有可能成为一个强大的技术评估平台,让最终用户与研究人员和机器设计师就系统进行开放和实质性的对话。
传感器和图像 AI 的实施以实现预测性维护
[压合机] 三铃工业株式会社以每分钟200~300次的高速压合金属带。由于离线目视检查是在加工一卷金属带后进行的,因此,如果冲压废料或冲压碎屑(金属碎片)粘附在模具上,就会产生数千到数万个缺陷凹痕。为了减少凹痕缺陷,需要在冲压废料、冲压碎屑等粘附到模具上时立即检测出来。
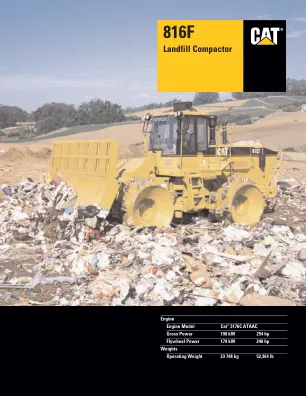
816F - 垃圾填埋场压实机 - Kelly 拖拉机公司
光滑轮选项。如果我们的倾倒选择不能满足您的需求,请考虑 Caterpillar 光滑钢轮。此选项可确保无论您喜欢哪种垃圾填埋场倾倒,您都可以获得符合我们严格规格的 Caterpillar 轮子。我们的制造和研究工程师共同设计、制造和测试完整的动力传动系统。轮子是整个系统的关键组件,与我们的垃圾填埋场压实机在同一工厂制造。这可确保整个系统由每个组件补充。更改关键组件可能会损害我们为实现最佳性能而设计的动力传动系统。如果安装的现成制造商的轮子不符合我们的设计规格并且不能平衡我们最终驱动器上的负载,则轴承寿命可能会大大缩短,并导致其他组件过早磨损,从而导致不必要的停机。这种情况与 Caterpillar 的目标背道而驰,即让我们的客户以最高的生产力、性能和压实度运营。此选项还允许我们的标准轴护罩系统与其设计的组件配合使用。