XiaoMi-AI文件搜索系统
World File Search System帧速率
Cosmo C2
frequency hopping • Ultra-low latency, as low as 33ms (1080P60 *) • Supports 3280ft(1000m) wireless transmission range • Transmitter supports HDMI IN, SDI IN, and SDI LOOP OUT • Receiver supports HDMI OUT A, SDI OUT A, HDMI OUT B, and SDI OUT B • HDMI/SDI port supports 1080P60输入和输出•HDMI/SDI端口支持分数帧速率输入和输出•在接收器上支持双UVC流量输出(1080p60)(MacOS上不支持双流式捕获)
SCD – 半导体器件。 - SIBAT
Blackbird 是一款先进的 MWIR 探测器,是 SCD 高清探测器系列的扩展。它包括一个 3 兆像素 FPA,像素格式为 1920x1536,间距为 10μm。新的 FPA 基于 SCD 成熟的 InSb 技术和采用先进 CMOS 工艺实现的数字读出电路。FPA 的尺寸与 SCD 的 SXGA 格式 Hercules 探测器非常相似,实际上可以封装在同一个杜瓦瓶中。这产生了一个非常大的格式探测器,具有出色的图像质量、高帧速率和相对紧凑的尺寸。
Tessera SX40 LED处理器
以标准2U机架形式提供,总输出容量为900万像素,SX40提供了支持全4K LED墙的支持,最高为60hz,12位颜色深度。它支持无延迟的4K上/下缩放缩放,以使源与屏幕以及所有行业领先的Tessera处理功能相匹配。这些包括HDR和动态校准以及超低潜伏期,HFR+(高帧速率)和框架重新映射。此外,在屏幕颜色调整(OSCA)上进行了颜色不匹配校正的知名度;还可以使用黑色区域细节的深色魔法和视频颜色更换的色谱
空中客车 A318/A319 A320/A321
Aerosoft Airbus 产品中的气象雷达可与任何气象插件配合使用,甚至无需配合使用。它实际上读取 FSX 中的天气状况,无需链接到任何气象插件。但是,由于它仅能做到这一点,因此也显示了 FSX 中天气的一些局限性。例如,它始终以方块形式构建。我们选择让这种效果可见,因为我们认为气象雷达应该显示天气的位置,而不是理想模拟器中的样子。由于我们模拟了气象雷达的实际工作,因此这也意味着需要进行大量计算,这可能会影响您的帧速率。由于风切变和湍流无法正确放置在 FSX 中,因此目前无法检测到它们。

文章 基于空间人工智能的小麦检测和防撞农业机器人平台
摘要:为了在小麦生长季节获得更一致的测量结果,我们构思并设计了一个自主机器人平台,该平台使用空间人工智能 (AI) 在作物行中导航时执行防撞。农学家的主要限制是在驾驶时不要碾过小麦。因此,我们训练了一个空间深度学习模型,该模型可帮助机器人在田间自主导航,同时避免与小麦发生碰撞。为了训练这个模型,我们使用了公开的预标记小麦图像数据库,以及我们在田间收集的小麦图像。我们使用 MobileNet 单次检测器 (SSD) 作为我们的深度学习模型来检测田间的小麦。为了提高机器人实时响应田间环境的帧速率,我们在小麦图像上训练了 MobileNet SSD,并使用了新的立体相机 Luxonis Depth AI 相机。新训练的模型和相机可以实现每秒 18-23 帧 (fps) 的帧速率 - 足够快,让机器人每行驶 2-3 英寸就能处理一次周围环境。一旦我们知道机器人准确地检测到周围环境,我们就会解决机器人的自主导航问题。新的立体摄像头使机器人能够确定与训练物体的距离。在这项工作中,我们还开发了一种导航和防撞算法,该算法利用这些距离信息帮助机器人观察周围环境并在田间机动,从而精确避免与小麦作物发生碰撞。我们进行了大量实验来评估我们提出的方法的性能。我们还将我们提出的 MobileNet SSD 模型获得的定量结果与其他最先进的物体检测模型(例如 YOLO V5 和 Faster 区域的卷积神经网络 (R-CNN) 模型)的定量结果进行了比较。详细的比较分析揭示了我们的方法在模型精度和推理速度方面的有效性。

AI虚拟鼠标。
这项研究将提出一种无需任何电子设备即可控制光标位置的方法。而诸如单击和拖动等操作将使用各种手势来执行。作为输入设备,拟议的系统只需要一个网络摄像头。该系统将需要使用 OpenCV 和 Python 以及其他工具。相机的输出将显示在系统的屏幕上,以便用户可以进一步校准它。NumPy 和鼠标是用于创建此系统的 Python 要求 - 在项目第一阶段,实现和探索是在虚拟鼠标上完成的。它还包括手部跟踪,跟踪手掌并显示帧速率,手指计数,计数手指并使用手部跟踪模块作为其基础。之后,手势音量控制通过提取某些手部特征来控制音量。这些项目旨在提高生产力。我们使用 Open-Cv、Media-Pipe 和 Python 等技术。Media-Pipe 由 Google 开发。它非常高效,有助于为 AI 项目提供快速解决方案。
800 万像素 CCD 显微镜科研相机
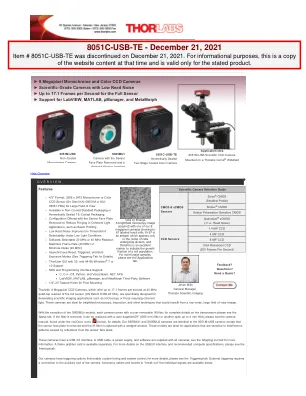
a. 使用具有“接口”选项卡上列出的推荐规格的计算机时,指定的性能有效。b. 曝光时间随操作模式而变化;使用外部触发器时,曝光时间可能短于 1 毫秒。c. ADC = 模拟数字转换器 d. ADU = 模拟数字单元 e. 相机帧速率受垂直硬件分级参数的影响。对于彩色相机,当 ThorCam 中的图像类型设置不是“未处理”时,仅 1 x 1 分级可用。设置为“未处理”时,相机最多可以分级 24 x 24,但生成的图像将是单色的。f. 如果您的应用程序受读取噪声限制,我们建议使用较低的 CCD 像素时钟速度 20 MHz。有关读取噪声的更多信息,以及如何估计总相机噪声限制因素的示例,请参阅相机噪声选项卡。
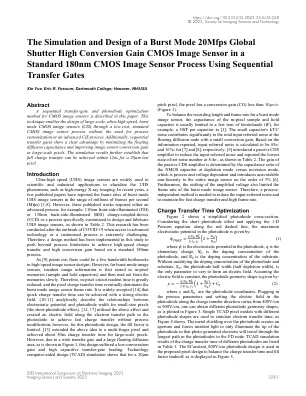
突发模式 20Mfps 全局的仿真与设计
超高速 (UHS) 图像传感器广泛应用于科学和工业应用,以阐明 UHS 现象,例如高能 X 射线成像。近年来,一些已发表的论文报道了突发模式 UHS 图像传感器的帧速率在每秒数百万帧 (Mfps) 的范围内 [1,8]。然而,这些已发表的研究要么需要先进的工艺,例如 110nm 前照式 (FSI) 或 130nm 背照式 (BSI) 电荷耦合器件 (CCD),要么需要专门为设计和制造 UHS 图像传感器而定制的工艺,如表 2 所示。这项研究是在 COVID-19 爆发后进行的,当时获得先进技术或定制工艺极具挑战性。因此,本研究实施了一种设计方法,以突破工艺限制,基于标准 180nm 工艺实现高速电荷传输和高转换增益。