XiaoMi-AI文件搜索系统
World File Search System平移运动

生成精确的平移运动以进行测试... - arXiv
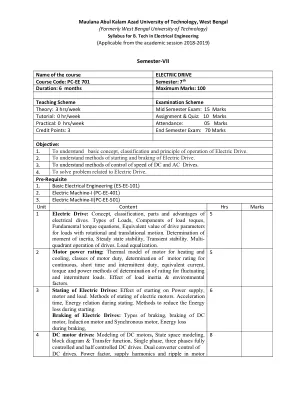
图 2:平台调整前测量位移的示例图(a)和基本优化后测量位移的示例图(b)。前者和后者情况下测量信号与标称波形的偏差分别放大了 200 倍和 1000 倍。
用于测试惯性传感器的精确平移运动生成
图 2:平台调整前测量位移的示例图(a)和基本优化后测量位移的示例图(b)。前者和后者情况下测量信号与标称波形的偏差分别放大了 200 倍和 1000 倍。
电气工程学士学位课程教学大纲
目标: 1. 理解电力驱动的基本概念、分类和运行原理。 2. 理解电力驱动的启动和制动方法。 3. 理解直流和交流驱动器的速度控制方法。 4. 解决与电力驱动相关的问题。 先决条件 1. 基础电气工程 (ES-EE-101) 2. 电机-I (PC-EE-401) 3. 电机-II (PC-EE-501) 单元内容 小时 分数 1 电力驱动:电力驱动的概念、分类、部件和优点。负载类型、负载扭矩分量、基本扭矩方程、旋转和平移运动负载的驱动参数等效值。转动惯量的确定、稳态稳定性、暂态稳定性。驱动器的多象限运行。负载均衡。

基于牛顿-欧拉法的六旋翼飞行器运动方程研究
摘要 本文旨在设计和研究无人驾驶飞行器 (UAV) 六旋翼飞行器在三维空间中的动态模型。基于牛顿-欧拉法确定了导出的运动方程。这些方程具有非线性和耦合性。此外,为了使六旋翼飞行器具有真实的运动,模型中还嵌入了气动效应和扰动。六旋翼飞行器是一种垂直起降 (VTOL) 飞行器,具有悬停能力和灵活性,因此与固定翼飞行器相比毫不逊色。尽管如此,它的动态模型很复杂,被描述为不稳定的,并且不能在不扭转其轴的情况下进行平移运动。除了控制和仿真设计模块外,还通过 LabVIEW 软件建立了结论性数学模型。因此,对多个实验状态的稳定性进行了分析,以便提前展示用于平衡和轨迹跟踪的适当控制器。关键词:——无人机,六旋翼飞行器动力学,非线性控制,耦合和欠驱动模型,牛顿-欧拉方法。
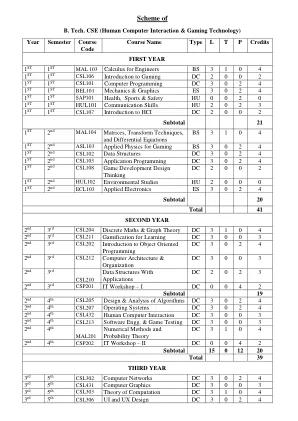
B. Tech. CSE(人机交互与游戏...
课程内容: 模块 1:基本概念 游戏物理 – 游戏引擎(简介)- 物理真实感 – 在游戏中的重要性、物理概念和游戏性能、基础知识 – 坐标系和参考系、标量和矢量、计算矢量大小、矢量叉积、矩阵 – 乘法和旋转、导数。 模块 2:基本牛顿力学和运动学 牛顿三运动定律 – 惯性 – 力 – 质量 – 加速度相等和相反的力、力矢量、力的类型 – 引力 – 摩擦力 – 向心力 – 力平衡和图表、功、能量 – 动能 – 势能 – 守恒 – 功率、平移运动 – 运动方程、旋转运动 - 扭矩 – 角加速度、2D 粒子运动学、3D 粒子运动学、刚体动力学。模块 3:抛射物抛射物属性、简单轨迹和重力、阻力、马格努斯效应 - 抛射物的旋转效应、游戏中的特定抛射物类型 - 炮弹 - 子弹 - 箭、可变质量。模块 4:碰撞:冲量和动量原理 - 线性和角冲量、弹性和非弹性碰撞冲击、恢复系数、碰撞方向和检测、与可移动和不可移动物体的碰撞、与摩擦的碰撞、2D 和 3D 碰撞、游戏应用。模块 5:物理建模:游戏车辆的物理学(飞机、轮船和小船、汽车和气垫船、枪支和爆炸、运动)教科书:1. 游戏程序员的物理学,

振荡电场对单分子离子偶极矩测量的影响
目前,人们致力于实现分子的精密光谱和量子态控制。与原子相比,分子的种类要多得多,它们具有更丰富的结构,可以提供完全不同的功能,并更适合某些任务,例如,对各种基础物理测试的灵敏度更高[1-4]。高内部状态相干性和跨频率量子信息转换的潜力也使分子在量子信息处理方面具有吸引力[5-9]。尽管近年来取得了令人瞩目的进展,但分子的量子态制备、检测和控制仍然比原子更困难[10-14]。量子逻辑光谱(QLS)[15]在研究带电粒子,特别是分子离子方面显示出巨大的前景和多功能性。它依靠原子“逻辑”离子种类对联合平移运动进行协同冷却和状态读出,并能够实现难以控制的带电粒子(“光谱”离子)的量子态制备、操纵和光谱分析[16-18]。在我们的实验中,所有针对分子离子的激光器都会驱动远失谐的受激双光子拉曼跃迁,而这些跃迁不依赖于分子的特定能级结构。这一点,加上对平移自由度的协同冷却和量子逻辑读出也可以在对分子结构细节要求不高的情况下进行,使得 QLS 可用于多种离子种类。为了探索分子的新应用,以高分辨率测量跃迁频率和其他特性,并解释在这种前所未有的精度水平下变得相关的微小系统效应也至关重要。特别是,自旋和原子核的相对运动增加了
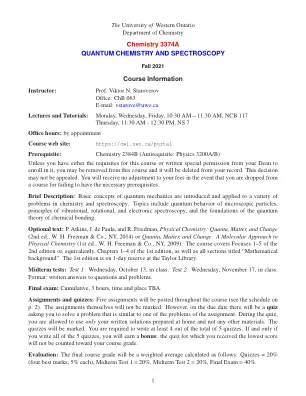
量子化学和光谱学
1. 微观物质的波粒二象性。经典力学无法描述原子和分子的结构。光和能量的量子。波粒二象性。德布罗意波及其实验观测。2. 薛定谔方程。微分方程。微观粒子的薛定谔方程。复数和复函数。概率和概率密度。波函数及其物理解释。算符、特征函数和特征值。汉密尔顿量。3. 自由和受限电子的平移运动。自由粒子。一维、二维和三维势箱中的粒子。盒中粒子模型的化学应用。化学键的矩形盒模型。穿过势垒的量子隧穿。4. 量子化学的数学形式。物理可观测量的算符。量子力学的假设。波函数的叠加。个体测量和期望值。交换和非交换算子。海森堡不确定性原理。跃迁偶极矩。光谱跃迁的强度。选择规则。5. 振动运动的量子力学描述。谐振子。谐振子的薛定谔方程。谐振子和双原子分子振动之间的联系。振动跃迁的选择规则。6. 旋转运动的量子力学描述。环中粒子的薛定谔方程。二维和三维旋转。角动量及其量化。球谐函数。双原子分子的刚性转子和旋转光谱。7. 氢原子的结构和光谱。单电子原子和离子的薛定谔方程。氢原子的能级、电子波函数和概率密度。原子轨道和量子数。自旋。8. 多电子原子。多电子波函数的轨道近似。自洽场。泡利不相容原理。构造原理和元素周期表。

不对称覆盖 DNA 折纸附属物的磁珠的推进
特别适用于为模仿生物微型游泳者的微电机提供拍打和/或旋转驱动。开创性的例子是 Dreyfus 等人建造的游泳者,它由一串拴在红细胞上的磁珠组成。[25] 在这里,游泳以衍生方式诱导精子,即通过拍打一个支持弯曲波传播的柔性附属物。自这一突破以来,已经制造出几种其他受生物启发的磁性微型游泳者,包括由定制微磁体、软磁复合材料和众多结构制成的微型游泳者,其中磁性区域驱动非磁性鞭毛/附属物。[13,15,16,20,26–29] 人们越来越多地研究附属物结构对游泳表现的影响,表明无论是生物系统还是合成系统,游泳速度都会随其长度、弹性和划水频率而变化。 [15,26,28,30] 此外,已确定生物微游泳者的集体相互作用微妙地依赖于鞭毛 (附属物) 耦合动力学和鞭毛下长度尺度上产生的流动。 [30] 这些相互作用在自然界中被用来提高性能:例如,老鼠精子形成长序列以提高其速度。 [7,10,30–33] 尽管如此,对合成系统的附属物设计进行严格控制仍然很困难,当需要纳米级特征时更是如此。 在纳米尺度上实现这种控制的一种特别有前途的方法是 DNA 自组装,正如 Maier 等人所采用的,用于生成基于 DNA 瓦管束的合成鞭毛。 [26] 当连接到旋转的磁珠上时,这些束通过水动力学组装成几微米的螺旋状结构,以类似于细菌的方式驱动平移运动。尽管组装技术可以精确控制合成鞭毛的扭曲和硬度,但它们的长度容易发生寡聚化并且不受控制。在本文中,我们基于 Maier 等人的工作,使用另一种 DNA 自组装策略,即 DNA 折纸。在这里,一个由 8634 个核苷酸组成的单链 DNA 环通过单链 DNA 寡聚体的特定结合以预定方式折叠,以构建定制的、尺寸可控的纳米级附加物。[34–37] 我们提出了一种调节附加物在磁珠上的覆盖率的方法,使其均匀或对称性破缺。通过时间相关磁场摇动这些结构时,我们发现,虽然完全被 DNA 折纸覆盖的结构主要表现出布朗动力学,