XiaoMi-AI文件搜索系统
World File Search System平飞时
CH-47D 和 AH-64 的运行噪声数据 - DTIC
它们正在取代 CH-47C 和 AH-1G。除了在最高速度下,速度变化对声音的影响并不是很大。就声音随负载变化而言,CH-47D 在满载平飞时发出的声音实际上比轻载时小,尽管在起飞和着陆时声音确实会随着负载而增加。与其他飞机一样,CH-47D 在着陆时发出的声音比在平飞或起飞时更大,但 AH-64 的声级几乎与操作无关。
交付时
大家明白,第 2254 号决议不能照搬照抄。例如,前政权不会参与任何未来的进程。当然还有其他例子。显然,在许多方面都需要新的方法和思维方式。但大家普遍认为,过渡仍需实现第 2254 号决议提出的主要目标: - 第一:可信、包容和透明的、由叙利亚人主导和主导的过渡。关于这一点,我要明确一点:我不相信任何叙利亚人会要求基于教派或种族的配额或从其他国家引进模式,而是要包括叙利亚社会和叙利亚各方的最广泛群体,以激发公众对过渡的信心。 - 第二:确保过渡政府可信、包容和非宗派主义。 - 第三:通过可信和包容的进程制定新宪法。 - 第四:根据国际标准举行自由和公正的选举,包容所有叙利亚人。主席先生,31. 过去几周,叙利亚妇女更加坚定了她们的期望和意愿,
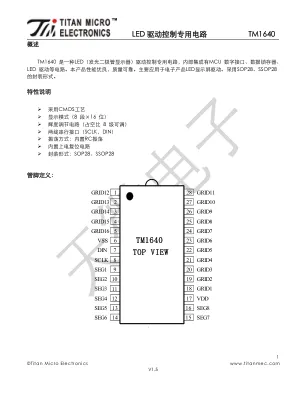
LED 驱动控制专用电路TM1640
微处理器的数据通过两线总线接口和TM1640 通信,在输入数据时当CLK 是高电平时,DIN 上的信号必须 保持不变;只有CLK 上的时钟信号为低电平时,DIN 上的信号才能改变。数据的输入总是低位在前,高位在后 传输.数据输入的开始条件是CLK 为高电平时,DIN 由高变低;结束条件是CLK 为高时,DIN 由低电平变为高 电平。

具有可证明稳定性的涵道风扇无人机悬停至高速平飞过渡的神经网络控制
摘要 本文主要研究涵道风扇垂直起降 (VTOL) 无人机 (UAV) 的过渡控制。为了实现从悬停到高速飞行的稳定过渡,提出了一种基于神经网络的控制器来学习系统动态并补偿飞机动态和所需动态性能之间的跟踪误差。首先,我们推导了飞机全包络动力学的非线性系统模型。然后,我们提出了一种基于神经网络的新型控制方案并将其应用于欠驱动飞机系统。所提出的控制器的主要特征包括投影算子、状态预测器和动态形成的自适应输入。证明并保证在整个神经网络学习过程中,状态预测器和神经网络权重的跟踪误差都有上限。高度自适应的输入形成动态结构,有助于实现所提出的控制器可靠的快速收敛性能,尤其是在高频扰动条件下。从而使飞行器的闭环系统能够以期望的动态性能跟踪一定的轨迹,仿真和实飞试验均取得了满意的结果,完成了设计的飞行路线。

VK0192 数据手册
时序基准发生器是一个 8 级递增计数器 , 可以精确的产生时基。看门狗 ( WDT )是由一个 时基发生器和一个 2 级计数器组成,它可以在主控制器 或其它子系统处于异常状态时产生中断。 WDT 计数溢出时产生一个溢出标 志,此标志可以通过命令输出到 /IRQ 脚 ( 开漏输出 ) 。时序基准发生器和 WDT 时钟的来源。时基和看门狗共用 1 个时钟源,可配置 8 种频率: f WDT = f sys/2 n ( n=0~7 )
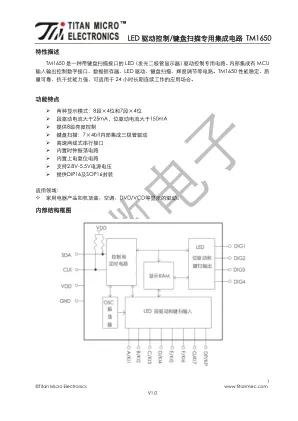
LED 驱动控制/键盘扫描专用集成电路TM1650
接口和TM1650 通信,在输入数据时当SCL 是高电平时,SDA 上的信号必须保持不变;只有SCL 上的 时钟信号为低电平时,SDA 上的信号才能改变。数据输入的开始条件是SCL 为高电平时,SDA 由高变