XiaoMi-AI文件搜索系统
World File Search System应变计
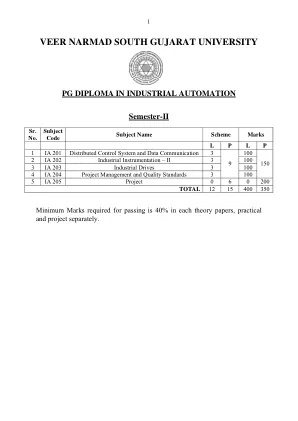
工业自动化研究生文凭 第二学期
1.感应电机驱动研究。2.交流驱动器的 V/F 和矢量控制操作模式研究。3.交流驱动器参数研究 – I。4.交流驱动器参数研究 – II。5.将交流驱动器与 PLC-I 连接。6.将交流驱动器与 PLC-II 连接。7.使用微控制器设计步进电机驱动器。8.带编码器反馈的 PMDC 驱动器设计。9.伺服驱动与位置控制研究。10.DCS-I研究。11.DCS-II研究。12.HMI研究。13.HMI配置-I。14.HMI配置-II。15.HMI配置-III。16.SCADA研究。17.SCADA 配置 - I.18.SCADA 配置 - II.19.SCADA 配置 - III.20.基于 PC 的 DAS-I 研究 21.基于 PC 的 DAS-II 研究 22.数据通信协议研究 - I.23.数据通信协议研究 - II.24.控制阀研究 - I.25.控制阀研究 - II.26.位移传感器的研究。27.液位测量的研究。28.应变计和扭矩测量的研究。29.在 MATLAB 上进行过程控制仿真 - I。30.在 MATLAB 上进行过程控制仿真 - II。31.在 MATLAB 上进行过程控制仿真 - III。

运行载荷监测系统在飞机主起落架连接框架疲劳评估中的应用
摘要:本文提出了一种基于操作载荷监测 (OLM) 系统记录的垂直着陆力对主起落架 (MLG) 连接框架疲劳进行评估的方法。特别是,分析了不同着陆阶段以及地面操作和 MLG 框架疲劳磨损的影响。开发的 OLM 系统的主要功能是对 Su-22UM3K 飞机主起落架节点结构因标准着陆和触地复飞 (T&G) 着陆而产生的疲劳进行单独评估。此外,该系统还允许评估着陆期间主起落架节点结构中的应力累积并允许检测硬着陆。开发的系统还实现了确定选定的飞行阶段、对应变计传感器在标准全停着陆和滑行期间记录的结构不同类型的负载循环进行分类。基于这些功能,可以监测和比较飞机之间的着陆疲劳磨损当量以及给定飞机所有航班的着陆疲劳磨损,这些可以纳入机队管理范例,以实现飞机的最佳维护。本文详细描述了用于起落架节点疲劳评估的系统和算法,并提供了和讨论了在六架飞机的机队 3 年系统运行期间获得的结果。

使用压电传感器实现人工智能驱动的触觉反馈
摘要 本文探讨了压电传感器在外科手术机器人假肢中的创新应用,强调了它们在精细手术过程中增强触觉反馈的潜力。压电传感器可以有效地将机械压力和振动转换为电信号,为外科医生实时感受和解释力、纹理和其他表面特征提供了重要手段。通过基于云的系统生成和传输触觉反馈的能力允许创建触觉模式数据库,从而能够在手术过程中自动识别特定的触觉交互。人工智能 (AI) 的集成通过从收集的数据中学习、预测未来的交互和优化模式识别进一步增强了系统。此外,将压电传感器与其他类型的传感输入(例如温度和应变计)相结合,可以实现多维反馈系统。这会带来身临其境的体验,使外科医生能够精确控制他们的机器人工具。通过人工智能和数据收集不断改进这些系统,为机器人手术的未来发展带来了巨大的潜力,从而实现更准确、更安全的手术和更好的患者治疗效果。这项研究强调了人工智能驱动的多感官反馈系统在增强机器人辅助手术能力方面的变革性影响。

设备清单
本课程的学生应能使用以下设备: 在为心血管技术课程选择设备时,请考虑所提供的亚专科: 侵入性心脏病学 荧光透视 X 射线装置/影像增强器,包括监视器和桌面控制器 带垫的检查台 生理监测系统 造影剂注射器 电影查看器 密度计和敏感度计 心输出量计算机 手术托盘/桌子 IV 杆 传感器托架 铅围裙、领圈、眼镜 铅防护罩 手动血压袖带 听诊器 主动脉内球囊泵 (IABP) 病人担架 除颤器 静脉注射臂 解剖模型/血管和冠状动脉 ECG、BP 和脉搏血氧仪监测系统(带电极) 起搏发生器 铅围裙架 枕头/楔子,有角度的 急救车和各种用品 导管(各种) 诊断和干预(包括支架) 所有尺寸的鞘 所有尺寸的扩张器 所有尺寸的导丝肺动脉导管 侵入性心脏病学协调合作伙伴 心血管技术 歧管(3、4 和 5 档锁) 应变计传感器 压力管 控制注射器 静脉输液袋和输液管 无菌手术服、手套、口罩、鞋套、帽子 病人单 穿刺针(包括其他针头) 手术刀 碗(无菌) 毛巾(无菌) 止血钳 4 x 4 纱布海绵(无菌和非无菌)
印度理工学院鲁尔基分校
1. 使用灯泡(电法)验证斯蒂芬辐射定律。2. 研究扭矩传感器的性能。3. 通过测量感应电压随时间的变化来验证法拉第和楞次感应定律。4. 研究磁场随亥姆霍兹排列中成对线圈沿载流线圈轴线位置的变化。5. 通过磁控管法确定电子的𝑒/𝑚(比电荷)。6. 使用真空管二极管 EZ-81 确定斯蒂芬常数。7. 研究线性可变差动变压器 (LVDT) 的特性。8. 表面张力 9. 验证斯托克斯定律 10. 使用应变计传感器测量压力 11. LDR 特性。12. 热膨胀。13. 通过测量辐射确定普朗克常数。 14. 研究耦合摆的正常模式和共振。15. 确定耦合摆中耦合弹簧的弹簧常数。16. 计算耦合摆的时间周期(𝑇 0 、𝑇 1 、𝑇 𝐵 和 𝜈 𝐵,耦合度)17. 用 Quincke 法确定顺磁性材料的质量磁化率 18. 通过测量固定光谱范围内的辐射确定普朗克常数的值。19. 利用牛顿环确定钠光的波长。20. 利用密立根油滴实验确定电子电荷。21. 研究 LDR、LED、太阳能电池、光电晶体管的 VI 特性。22. 四分之一波片。23. 马吕斯定律。24. 布儒斯特角。25. 单缝衍射。 26.双缝衍射。

隧道和地下空间技术 - reposiTUm
本文采用混合方法(即计算-实验方法)来解决分段隧道衬砌中应力的实际估计问题。在(i)在隧道现场环境条件下进行为期一年的单轴蠕变试验的混凝土样品中,以及(ii)在构成 Koralm 隧道衬砌的管道中安装了配备热敏电阻的振线应变计。从蠕变试验中获得的数据可用于校准和验证积分微分热粘弹性模型。蠕变函数结合了短期蠕变的幂律和长期蠕变的对数律。相应的松弛函数通过拉普拉斯-卡森变换、反演和反变换确定。这是将在 Koralm 隧道 KAT3 中 Ring 2013 管道中测得的周向应变历史转化为周向和纵向应力演变的基础。它们主要是由于机械地壳相互作用。相应的利用率在环安装后的前四个月内增加,此后几乎保持不变。季节性温度变化引起的应力波动只起很小的作用。关于长期预测,非常有趣的是,当将管道中记录的应变测量绘制为时间对数函数时,会遵循双线性趋势。这些趋势可以推断到 150 年,即奥地利新建隧道的目标使用寿命。在此期间,基于粘弹性的应变传感器附近应力估计值在时间上保持不变,约为混凝土强度的 40%。
莱特兄弟风洞
摘要低速亚音速测试 • WBF 研究和开发风洞是一个闭式回流连续流动回路。 • 特性(适用于一个大气压运行,80% 功率) 马赫数:0 到 0.25 雷诺数:0 到 1.8 x 10 6 每英尺 动压:0 到 67 psf 温度:0 到 100°F 测试区域:10 英尺 x 7.5 英尺椭圆形部分,15 英尺长 • 典型测试项目包括飞机开发、非稳定翼型流场研究、发动机舱诱导涡流生成、地平面影响、阵风相互作用、旋翼。 • 数据采集系统包括与计算机系统相连的力天平,用于在线记录、存储和检查原始、简化或图形显示的输出。 32 通道数字数据记录 • 多用户设施允许同时进行数据比较或操作,以及相关计算以进行分析。 • 压力测量系统包括三个计算机控制的 Scani 阀和 Setra 传感器,其平坦频率响应可达 800 Hz。• 外部六分量主机械平衡适用于升力负载达 3000 磅的支柱式模型。内部应变计平衡适用于负载达 100 磅的支柱式支架、模型组件等。• 辅助空气供应用于推进装置、喷射、边界层控制等。在 60 或 125 psi 时,连续流速分别为 1.5 或 0.5 lb/sec,在 100 psi 时间歇为 4 lb/sec,在 22 psi 时为 9 lb/sec。• 阵风发生器系统用于纵向和水平阵风。近似值

“大脑听诊器”
颅内压 (ICP) 升高通常在多种情况下进行筛查,包括脑积水、假性脑瘤和创伤 [1]。测量 ICP 的标准实践包括腰椎穿刺,通过压力计测量脑脊液开放压力,或通过应变计传感的外部脑室引流盐水柱的直接颅内接口测量脑脊液开放压力 [2]。这显然是侵入性的,而且往往会让患者感到不舒服。需要常规 ICP 监测的患者必须定期忍受这一过程 [3]。显然需要一种微创或非侵入性技术来筛查 ICP 升高 [4]。许多研究试图开发非侵入性方法来识别 ICP 升高,例如经眼超声、颈动脉多普勒和耳蜗导水管传输 [2,5,6]。然而,到目前为止,还没有一种被证明足够可靠以用于临床实践 [2,4- 7]。一种有趣的技术是利用鼓膜搏动来推导 ICP [8,9] 。该技术最早在 20 世纪 70 年代被描述,利用了脑脊液 (CSF) 和中耳之间通过耳蜗导水管 [10] 的已知通道。许多研究表明,这种连接可以将心脏搏动波形 (ICP 波形) 传输到鼓膜 (TM),并可以从 TM 搏动中推导 ICP 波形 [10-14] 。尽管之前的测试已经能够推导这种波形,但耳蜗导水管多变的声学特性往往使得经典的 ICP 波形指标(如振幅和时间平均值)不可靠 [2,15] 。这种限制,加上最初检测这些波形所需的笨重而复杂的设备,使得这种
MT 课程 - AE IITM
M.Tech. 课程内容 AS 3010 航空航天技术概论 3003 航天任务类型、环境、天体动力学:轨道力学基础(双体运动、圆周速度和逃逸速度、椭圆双曲和抛物线轨道运动);基本轨道机动。 火箭推进基础:上升飞行力学:运载火箭选择。进入大气层;进入飞行力学;进入加热。姿态确定和控制;基本概念;旋转动力学回顾;刚体动力学;扰动扭矩;被动姿态控制;主动控制;姿态确定。热控制、航天器功率、电信。 AS 5010 工程空气动力学与飞行力学 3003 流体力学基本方程。无粘流。流函数。速度势。二维不可压缩流:拉普拉斯方程及其解。翼型流;保角变换,薄翼型理论。有限机翼简介;普朗特升力线理论。边界层和分离对翼面流动的影响。大气。飞机基本性能评估。稳定性和控制简介。 AS 5020 气体动力学和推进要素 3003 气体动力学基本方程。一维等熵流。马赫波,冲击波。带有冲击、传热和摩擦的一维流动。二维冲击。普朗特-迈耶流。线性化二维亚音速流;普朗特-格劳特/戈特特变换。线性化超音速流;阿克雷特理论。吸气式和火箭推进系统的分类及其工作原理。螺旋桨理论,不同类型发动机的性能。高度和前进速度的影响。燃气涡轮发动机部件、构造和性能。 AS 5030 飞机和航空航天结构 3003 飞机分类、飞行原理、飞行控制、基本仪器和飞机系统、直升机机翼分析。剪切中心。封闭和开放管的弯曲和扭转。多室管。柱和梁柱。板和板桁组合的弯曲和屈曲。机身分析。实验技术;应变计、光弹性、离散和连续系统的振动。

peakvue 的描述及其宽度的说明
摘要:本文的主要目的是作为 PeakVue TM 分析方法的“白皮书”。PeakVue 分析实际上是对金属部件中“应力波”活动的一种测量。此类应力波与冲击、摩擦、疲劳开裂、润滑等有关,会在滚动轴承和齿轮等各种部件中产生故障。例如,当滚动元件撞击轴承滚道上的缺陷时,它将产生一系列应力波,这些应力波会从缺陷位置向多个方向传播。波传播会在机器表面产生波纹,从而会在检测绝对运动的传感器(如加速度计或应变计)中引入响应输出。本文并非暗示应力波分析 (PeakVue Analysis) 是状态监测工具的“万能药”,应该取代目前用于检测和纠正机器故障的所有 PdM 工具。相反,其主要目的是证明应力波分析是一种强大的补充工具,可以检测一系列故障和问题条件,而在某些情况下,仅使用振动分析等技术可能会遗漏这些故障和问题条件。产生应力波的一些常见缺陷包括抗摩擦轴承滚道中的点蚀导致滚子撞击、轴承滚道或齿轮齿(通常在根部)中的疲劳开裂、齿轮齿上的擦伤或划痕、齿轮齿破裂或断裂等。挑战在于检测和量化与能量和重复率相关的应力波活动。这可以识别某些故障,并且根据经验,可以评估检测到的故障的严重程度。本文将开始介绍应力波是什么以及如何测量应力波。它将描述用于测量应力波的一些信号处理方法,并展示这与处理振动信号的不同之处。本文的一个重要主题将涉及确保捕获最佳 PeakVue 数据所需的推荐测量设置。这将包括高通滤波器、分析带宽 (F MAX )、FFT 线数、时域样本数等的正确选择。这些参数的选择可能取决于所寻找的故障类型(裂纹齿轮齿与广义齿