XiaoMi-AI文件搜索系统
World File Search System座间

26 座发电厂背板故障的高级分析
摘要。背板退化是影响现场暴露光伏 (PV) 模块发电厂的已知可靠性问题。在这项工作中,我们介绍了过去三年的经验教训,在弗劳恩霍夫 ISE 的 TestLab PV 模块中检查了来自 26 个发电厂的模块。基础是对当前观察到的背板和相关退化特征的描述,例如背板粉化、不同层中的裂缝和成分的化学变化。此外,我们还列出了对故障和模块材料进行初步和更详细分析的分析方法。例如,已发现一种称为“闪光灯测试”的方法可以快速直接地识别背板内受损的聚丙烯 (PP) 层。此外,还介绍了扫描声学显微镜 (SAM) 和不同 FTIR 光谱变体的比较。

双重挑战。子痫前期和围角座...
动脉高血压是一个严重的公共卫生问题。由于久坐的生活方式和肥胖症流行,原发性动脉高血压的患病率每年增加。但是,不应忽略继发性高血压的存在。次要高血压的一种形式是单基因高血压,这是一种基因依赖性疾病,与中度至严重的耐药性高血压以及较高的DE静态神经和心血管并发症的风险更高。应在共存水和电解质不平衡或稀有的患者中考虑,并以早熟或延迟的青春期,生长不足和脑臂状态考虑。CHAR开发特征包括水和电解质平衡的损害,最常见于低钾血症和代谢性碱中毒。鉴定具有单基因高血压的患者对于实施适当的治疗并降低并发症的风险至关重要。


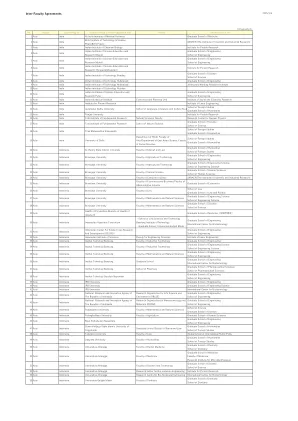
计划间安排
如果您位于美国、波多黎各联邦和美属维尔京群岛(以下简称“BlueCard 服务区”)之外,在获取承保的医疗保健服务时,您可能能够利用 Blue Cross Blue Shield Global® Core。Blue Cross Blue Shield Global® Core 在某些方面与 BlueCard 服务区提供的 BlueCard 计划不同。例如,尽管 Blue Cross Blue Shield Global® Core 可帮助您访问住院、门诊和专业医疗服务提供者网络,但该网络并非由 Host Blue 提供服务。因此,当您从 BlueCard 服务区以外的医疗服务提供者处接受护理时,您通常必须向医疗服务提供者付款并自行提交索赔才能获得这些服务的报销。



设计一个形状的座椅垫以改善姿势(dis ...
摘要 长时间坐着会增加健康问题的风险和不适感。因此,座板设计至关重要,主要受两个因素影响:压力分布和座椅轮廓。对于座板不适,较低的平均压力伴随着较少的不适。此外,接触面积大的座椅轮廓与更舒适相关。因此,我们精确设计(虚拟原型)并实现(物理原型)了一种形状的坐垫,旨在将由于座椅和臀部之间的相互作用而产生的压力分布转化为适合国际人口(包括 P5 女性和 P95 男性)的几何形状。有了这种形状,压力应该更均匀、更低,界面接触面积更大,感知舒适度更高。本文通过可重复且直接的方法描述了虚拟和物理原型设计。此外,还通过与标准平垫进行比较,进行了实验以验证该假设。结果表明,设计目标已经实现:异形垫的压力分布比平垫小,接触面积更大。关键词:产品建模/模型、以用户为中心的设计、设计方法、表面建模、原型制造方法 联系人:Fiorillo,Iolanda 萨勒诺工业工程大学 意大利 ifiorillo@unisa.it
利用脑电信号识别座舱内飞行员心理负荷
摘要:商用飞机驾驶舱是一个自然的多任务工作环境,其中经常以各种形式出现中断,在许多情况下导致航空事故报告。自动表征飞行员的工作负荷对于防止此类事故至关重要。此外,尽可能最小化生理传感器网络仍然是一项挑战和要求。脑电图 (EEG) 信号与特定的认知和心理状态(例如工作负荷)显示出高度相关性。但是,文献中没有足够的证据来验证模型在新的受试者执行与模型训练期间的工作负荷相似的任务的情况下的泛化能力。在本文中,我们提出了一个卷积神经网络,用于在连续性能任务测试中对不同心理负荷的 EEG 特征进行分类,该测试部分测量工作记忆和工作记忆容量。我们的模型在一般人群层面有效,并且能够将任务学习转移到模拟作战环境中的飞行员心理工作量识别。
带涵道风扇的尾座式发动机的建模与控制
第 4 章 姿态控制 ..................................................................................................................................................................................39 4.1 姿态误差....................................................................................................................................................................................................41 4.1.1 四元数姿态误差....................................................................................................................................................................................41 4.1.2 解算倾斜扭转....................................................................................................................................................41 .................................................................................................................................................................................43 4.1.3 解析欧拉角....................................................................................................................................................................................49 4.1.4 姿态误差对比....................................................................................................................................................................................................61 4.2 姿态控制....................................................................................................................................................................................................................................61 62 4.2.1 PID . ... . ...