XiaoMi-AI文件搜索系统
World File Search System异步

实用的大规模证明异步总计...
我们提出了简单且实用的协议,以产生与异步总订单广播所使用的随机性。协议在带有动态变化的股份的验证验证设置中安全。可以将它们插入异步的总订单广播中的现有协议中,并将其变成带有动态利益的异步总订单广播。我们的贡献依赖于两种重要技术。“君士坦丁堡中的随机甲壳:使用密码学的实用异步拜占庭一致” [Cachin,Kursawe和Shoup,PODC 2000],通过使用阈值密码来影响实用的总订单广播的设计。但是,它需要一个设置协议才能有效。在带有动态利益的验证验证设置中,必须不断地重新计算此设置,从而使协议不切实际。“异步拜占庭式拜占庭与次级交流的一致性” [Blum,Katz,Liu-Zhang和Loss,TCC 2020],展示了如何使用初始设置进行广播以渐近地生成子序列设置。该协议诉诸于完全同态加密,因此并非实际效率。我们采用动态危险将其方法采用的验证验证设置,将其应用于君士坦丁堡纸,并消除完全同构加密的需求。这将产生简单且实用的证明协议。

一种新型的基于异步脑信号的驱动器——......
摘要:直接应用脑信号来操作移动载人平台(例如车辆)可能有助于神经肌肉疾病患者恢复驾驶能力。本文开发了一种基于脑电图(EEG)信号的新型驾驶员-车辆接口(DVI),用于脑控车辆的连续和异步控制。所提出的 DVI 由用户界面、命令解码算法和控制模型组成。用户界面旨在呈现控制命令并诱导相应的大脑模式。开发了命令解码算法来解码控制命令。建立控制模型以将解码的命令转换为控制信号。离线实验结果表明,所开发的 DVI 可以生成准确率为 83.59% 的运动控制命令,检测时间约为 2 秒,而在空闲状态下的识别准确率为 90.06%。基于 DVI 开发了实时脑控模拟车辆,并在 U 型转弯道路上进行了测试。实验结果表明 DVI 用于连续和异步控制车辆的可行性。这项工作不仅推动了脑控汽车的研究,而且为驾驶员-车辆界面、多模式交互和智能汽车提供了宝贵的见解。

非侵入式异步脑机接口技术研究综述
接口技术[j]。信号处理期刊,2023年,39 (8):1386-1398。doi:10。16798/j。ISSN。 1003-0530。 2023。ISSN。1003-0530。2023。

用于捕获事件的异步无线网络......
我们引入了一种无线射频网络概念,用于从大量空间分布的自主微传感器(数量可能达数千个)中捕获稀疏事件驱动数据。每个传感器都被认为是一个微芯片,能够在将时变输入转换为脉冲序列时进行事件检测。受大脑信息处理的启发,我们开发了一种基于码分多址方法的频谱高效、低错误率异步网络概念。我们通过实验表征了几十个亚毫米级硅微芯片的网络性能,并辅以更大规模的计算机模拟。对片上时钟的不同实现进行了比较。为了测试基于脉冲的无线通信与神经形态计算技术的下游传感器群体分析自然匹配这一概念,我们部署了一个脉冲神经网络 (SNN) 机器学习模型来解码灵长类动物皮层中八千个脉冲神经元的数据,以准确预测光标控制任务中的手部运动。
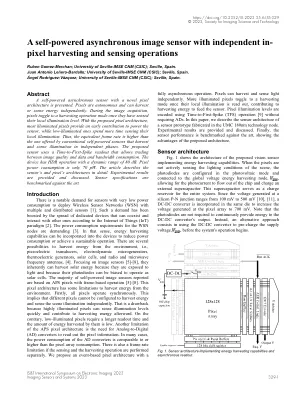
具有独立输入的自供电异步图像传感器
本文介绍了一种具有新颖像素结构的自供电异步传感器。像素是自主的,可以独立收集或感应能量。在图像采集过程中,一旦像素感应到其局部照明水平,它们就会切换到收集操作模式。使用所提出的像素架构,大多数发光像素都会为传感器提供早期供电,而低照度像素则会花费更多时间感应其局部照明。因此,等效帧速率高于传统自供电传感器提供的帧速率,后者在独立阶段收集和感应照明。所提出的传感器使用首次尖峰时间读数,允许在图像质量和数据与带宽消耗之间进行权衡。该设备具有动态范围为 80 dB 的 HDR 操作。像素功耗仅为 70 pW。本文详细介绍了传感器和像素的架构。提供并讨论了实验结果。传感器规格与现有技术进行了对比。

异步多方量子计算?
摘要。多方量子计算(MPQC)允许一组各方通过私人量子数据安全地计算量子电路。当前的MPQC协议依赖于网络是同步的事实,即,保证发送的消息可以在已知的固定延迟上限内传递,不幸的是,即使只有一条消息迟到,也完全分解了。是由现实世界网络的动机,Ben-OR,Canetti和Goldreich(Stoc'93)的开创性工作启动了对不同步网络的经典电路的多方计算的研究,其中网络延迟可以是任意的。在这项工作中,我们开始研究异步多方量子计算(AMPQC)协议,其中计算电路为量子。我们的结果完全表征了最佳可实现的损坏阈值:我们提出了一个n-党AMPQC协议,最多可将T 值得注意的是,这种特征与类似的经典环境不同,其中最佳损坏阈值为t值得注意的是,这种特征与类似的经典环境不同,其中最佳损坏阈值为t

量子网络的异步纠缠分发协议
摘要 基于纠缠的量子网络可以通过在远距离端节点之间分发纠缠对来提供无条件安全的通信。为了实现端到端的纠缠分布,量子中继器链中总是需要进行多次纠缠交换操作。然而,由于不完善的物理设备导致纠缠交换的不确定性,交换操作的执行模式直接影响纠缠分布的性能,可归类为纠缠访问控制(EAC)问题。在本文中,我们将EAC问题归结为两个方面:量子节点内的匹配优化和量子节点间的交换冲突避免。据此,我们提出了一种异步纠缠分发协议,该协议分别包含自定义的加权最大匹配算法和可靠的信令交互机制以避免交换冲突。基于所提出的协议,量子中继器自主决定其行为并自发异步构建端到端纠缠对。仿真结果表明,我们的协议可以显著提高端到端纠缠对的纠缠分配率和保真度,同时简化量子网络的部署和管理过程。

联想提示异步BCI诱导中风患者的皮质可塑性
目的:我们提出了一种新型的基于提示的异步大脑 - 计算机间(BCI)通过内源性运动皮质活性与体感途径的激活配对进行神经调节。方法:拟议的BCI检测到实时从单审EEG信号移动的意图,但是与经典的异步BCI系统相反,该检测仅在患者被提出移动时发生时间间隔。将这种基于提示的异步BCI与两种传统的BCI模式(异步BCI和非线同步BCI)进行了比较,并在慢性中风患者中进行了对照干预。记录其大脑信号时,患者在每种干预措施中进行了脚踝肢体的脚踝背部运动。BCI干预措施通过电刺激解码了运动尝试并激活传入途径。皮质运动的兴奋性是在干预后,通过经颅磁刺激引起的胫骨前肌中的运动诱发电位评估的。结果:与先前开发的异步BCI相比,提出的基于提示的异步BCI的假阳性/分钟和误报/真实阳性(%)的较少较少。线性混合模式显示,与对照条件相比,干预后所有BCI模式后,运动诱发的电势幅度增加(p <0.05)。拟议的基于提示的异步BCI导致所有干预措施中的峰值峰值运动诱发潜力振幅(141%33%)的相对增加最大,并持续30分钟(111%33%)。解释:这些发现证明了新提出的基于提示的异步BCI干预的高性能。在此范式中,个人收到精确的说明(CUE)来促进参与度,而精确检测到大脑活动的时机以建立与可塑性诱导的感觉输入的精确关联。
使用随机下降法对异步传感器配电网络进行状态估计:预印本
摘要 —本文研究了带有异步传感器的配电网的状态估计问题,该配电网由具有多种采样和报告率的智能电表和相量测量单元 (PMU) 组成。我们考虑了两种独立的状态估计和跟踪场景,状态为电压或电流。利用这两组数据,我们研究了 (a) 完整数据(假设所有测量值均可用)和 (b) 有限数据(采用在线算法方法通过在可用时处理测量值来估计可能随时间变化的状态)下的估计。所提出的算法受到经典随机梯度下降 (SGD) 方法的启发,根据先前的估计和新获得的测量值更新状态。最后,我们通过 IEEE-37 测试网络上的数值模拟证明了估计和跟踪的有效性,同时还强调了以电流为状态的估计如何导致更快的收敛。

基于ERP的大脑的强大异步控制 -
背景和客观。基于事件相关电位(ERP)的大脑计算机接口(BCI)是在辅助环境中替代和增强通信的有前途的技术。但是,迄今为止的大多数方法都是同步的,当用户希望将注意力转移到BCI系统时,要求主管的干预。为了将这些BCIS带入现实生活中,通过监视用户注意力,需要对系统进行强大的异步控制。尽管这种限制非常重要,这阻止了这些系统在实验室外的部署,但在研究文章中通常会忽略它。这项研究的目的是提出一种新的方法来解决这个问题,在此上下文中第一次深入学习,以克服基于手工制作的特征的先前策略的局限性。方法。基于EEG启动,提出的方法是一种新型的深层卷积神经网络,将问题分为两个阶段以实现异步控制:(i)模型检测用户的控制状态,(ii)仅在用户参与刺激的情况下才能解码命令。此外,我们使用转移学习来减少校准时间,甚至探索无校准方法。结果。我们的方法通过22个健康受试者进行了评估,分析了校准时间和刺激序列对系统性能的影响。此外,我们的无校准方法也取得了合适的结果,最大精度为89.36%,显示了转移学习的好处。结论。对于控制状态检测阶段,我们仅使用1个刺激序列和30次校准试验报告平均精度以上91%,最高为96.95%,使用15个序列。至于包括两个阶段的整体异步系统,最大信息传输速率为35.54 bpm,是高速通信的合适值。拟议的策略通过校准试验和刺激序列比以前的方法较少,这是一个有希望的步骤,为基于ERP的拼写者的更实际应用铺平了道路。