XiaoMi-AI文件搜索系统
World File Search System快速飞行
Zenith 飞机杂志 2020a
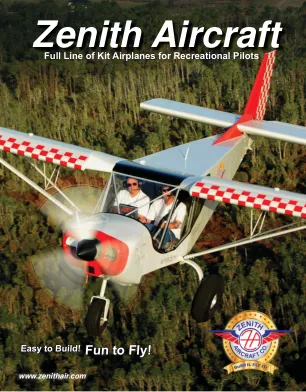
打造自己的飞机必定是一项复杂的任务。我们的飞机并不是绝对最快的(尽管有些飞机确实可以快速飞行)。它们可能不是最漂亮的。(我们说漂亮就是漂亮本身,又称“形式追随功能”)。在运载全尺寸人员和行李的情况下,它们的起飞和降落距离确实比大多数飞机短。带有可操纵前轮的标准三轮车起落架使地面处理变得容易。非常低的失速速度和可预测的特性使它们对空中休闲飞行员来说很友好。但从建造者的角度来看,最重要的是,它们都经过专门设计,对于首次组装套件的人来说非常简单和易于组装。您会听到关于半成品飞机在地下室或车库中闲置的悲伤故事。您不会在其中找到很多 Zenith 飞机!
Zenith 飞机杂志 2020a
打造自己的飞机必定是一项复杂的任务。我们的飞机并不是绝对最快的(尽管有些飞机确实可以快速飞行)。它们可能不是最漂亮的。(我们说漂亮就是漂亮本身,又称“形式追随功能”)。在运载全尺寸人员和行李的情况下,它们的起飞和降落距离确实比大多数飞机短。带有可操纵前轮的标准三轮车起落架使地面处理变得容易。非常低的失速速度和可预测的特性使它们对空中休闲飞行员来说很友好。但从建造者的角度来看,最重要的是,它们都经过专门设计,对于首次组装套件的人来说非常简单和易于组装。您会听到关于半成品飞机在地下室或车库中闲置的悲伤故事。您不会在其中找到很多 Zenith 飞机!

基于人工智能的时变环境下 HAPS 规划框架
高空伪卫星 (HAPS) 是一种固定翼、太阳能供电的无人驾驶飞行器 (UAV),旨在成为固定轨道卫星的灵活替代品,用于长期监测地面活动。然而,由于其重量轻、电动机功率弱,该平台对天气相当敏感,无法在危险天气区快速飞行。在这项工作中,我们将多个 HAPS 的任务规划问题公式化为以 PDDL+ 表示的混合规划问题。该公式还考虑了平台动态建模问题、时变环境以及需要执行的异构任务。此外,我们提出了一个框架,将 PDDL+ 自动规划器与自适应大邻域搜索 (ALNS) 方法相结合,开发该框架是为了将自动规划器与特定于该问题的元启发式方法相结合。任务和运动规划在框架内以交织的方式完成,因此保留了共同的决策/搜索空间。我们使用第三方 HAPS 真实模拟器以及一组基准测试验证了我们的方法,表明我们的集成方法可以制定可执行的任务计划。