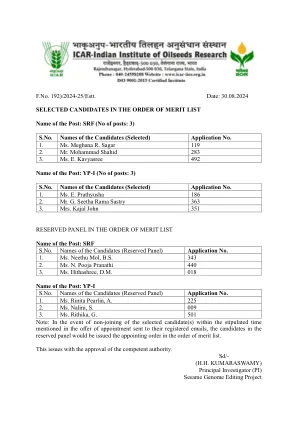
XiaoMi-AI文件搜索系统
World File Search System或维数
高尺寸的块茎土豆品种
Ladics,G.S。,Selgrade,M.K.,2009。Identifying Food Proteins with Allergenic Potential: Evolution of Approaches to Safety Assessment and Research to Provide Additional Tools.调节毒理学和药理学54,S2 – S6。https://doi.org/10.1016/j.yrtph.2008.10.010
通过分形维数表征抗癫痫药物对脑电图神经动力学的影响
到目前为止,ASM 反应的两个最可靠的 EEG 生物标志物是发作间期癫痫样放电和功率谱分析,而个体 Alpha 频率 (IAF) 峰值的使用仍存在争议,但可能代表一种有前途的生物标志物 (Reynolds et al., 2023 )。然而,这些线性方法主要捕捉 EEG 信号的振荡分量,不考虑 EEG 信号中存在的非平稳性和非线性 (Stam, 2005; Klonowski, 2009 )。正如 Cole 和 Voytek 以及 Jones 及其同事 (Jones, 2016; Cole 和 Voytek, 2017) 所述,脑信号不仅仅代表特定频率的持续振荡,而是代表间歇性重复的短暂活动 (Feingold 等人, 2015; Lundqvist 等人, 2016)。神经调节研究表明,在调节大脑(Somers 和 Kopell,1993 年;Fröhlich 和 McCormick,2010 年;Fröhlich,2015 年;Dowsett 和 Herrmann,2016 年;Cottone 等人,2018 年;Porcaro 等人,2019 年)和调节大脑节律(Somers 和 Kopell,1993 年;Dowsett 和 Herrmann,2016 年)方面,复杂非正弦波形的应用比正弦振荡器更有效。分形维数分析等非线性方法捕获的这种“隐藏信息”可能是线性方法的补充和补充,可以揭示健康人以及患有神经病理学疾病的患者的生理神经通讯、计算和认知(Goldberger,2001;Goldberger 等人,2002;Zhang 和 Raichle,2010;Rodríguez-Bermúdez 和 García-Laencina,2015;Porcaro 等人,2017、2019、2020a、b、2022)。这就是为什么时间序列分形分析越来越多地用于从基础到科学的不同研究领域的原因

同时间隔数 - 滴
我们通过称为同时间隔号的图形宽度参数提出了一种概括间隔图等级的新方法。此参数与间隔图的同时表示问题有关,并定义为标签的最小数字D,使得该图允许d-相对的间隔表示,即间隔和标签集的分配到顶点的分配,以便在相应的间隔相对间隔内仅相邻两个角度,以及它们的实验室集合,以及它们的实验室集合。我们表明,此参数是NP -HARD来计算并给出参数的几个边界,特别表明它夹在路径宽和线性中的MIM宽度之间。对于具有有界参数值的图类类别,假设该图配备了带有恒定标签数量的同时间隔表示,我们为集团,独立集和主导集合问题提供了FPT算法,以及独立支配集合和着色问题的硬度结果。独立集和统治集的FPT结果是同时间隔数和解决方案大小。相比之下,已知两个问题都是线性含量宽度加上溶液尺寸的hard。

语义增强图像-文本预训练模型的零样本三维模型分类
Cheraghian 等人 [ 21 – 23 ] 在零样本 3 维模型分类方 面提出了 3 维点云的零样本学习方法、缓解 3 维零样 本学习中枢纽点问题的方法和基于直推式零样本学 习的 3 维点云分类方法,并将它们封装进一个全新 的零样本 3 维点云方法 [ 24 ] 中。以上方法均是利用已 知类样本的点云表征及其词向量对未知类别进行分 类,开创了零样本 3 维模型分类方法。近年来, CLIP 在零样本图像分类上取得了良好的效果,因此有研 究者将 CLIP 应用到零样本 3 维模型分类方法中, Zhang 等人 [ 25 ] 提出了基于 CLIP 的 3 维点云理解 (Point cloud understanding by CLIP, PointCLIP) 模型, PointCLIP 首先将 3 维点云投影成多个深度图,然 后利用 CLIP 的预训练图像编码器提取深度图特 征,同时将类别名称通过 CLIP 预先训练的文本编 码器提取文本特征。但是 PointCLIP 的性能受到深 度图和图像之间的域差异以及深度分布的多样性限 制。为了解决这一问题,基于图像 - 深度图预训练 CLIP 的点云分类方法 (transfer CLIP to Point cloud classification with image-depth pre-training, CLIP2Point) [ 26 ] 将跨模态学习与模态内学习相结合 训练了一个深度图编码器。在分类时,冻结 CLIP 的图像编码器,使用深度图编码器提取深度图特 征,该方法缓解了深度图和图像间的模型差异。用 于 3 维理解的图像 - 文本 - 点云一致性表征学习方法 (learning Unified representation of Language, Im- age and Point cloud for 3D understanding, ULIP) [ 27 ] 构建了一个图像、文本和点云 3 种模态的 统一嵌入空间,该方法利用大规模图像 - 文本对预 训练的视觉语言模型,并将 3 维点云编码器的特征 空间与预先对齐的视觉 - 文本特征空间对齐,大幅 提高了 3 维模型的识别能力。与之相似的是,基于 提示文本微调的 3 维识别方法 (CLIP Goes 3D, CG3D) [ 28 ] 同样使用 3 元组形式确保同一类别的 3 维模 型特征和图像特征之间以及 3 维模型特征和文本特 征之间存在相似性,从而使点云编码器获得零样本 识别的能力。另外, PointCLIP V2 [ 29 ] 在 Point- CLIP 的基础之上,通过利用更先进的投影算法和 更详细的 3 维模型描述,显着提高了零样本 3 维模型 分类准确率。本文采用语义增强 CLIP 解决图像和文 本的语义鸿沟问题,通过在语义层面为图像和文本 提供更多相似的语义信息,使图像和文本对齐更具有 一致性,从而有效提高 3 维模型的零样本分类性能。 2.2 提示工程


功率循环测试的 DUT 温度系数依赖性
[5] R. Schmidt 和 U. Scheuermann,“使用芯片作为温度传感器 - 陡峭横向温度梯度对 Vce(T) 测量的影响”,2009 年第 13 届欧洲电力电子及应用会议,巴塞罗那,2009 年,第 1-9 页。