XiaoMi-AI文件搜索系统
World File Search System抓地力

临床上很重要的毛皮配位 -
抽象目的:使用脑部计算机界面(BCI)控制的神经假体来证明自然主义运动控制速度,协调的掌握和从训练到新物体的延长。设计:与前臂功能电刺激(FES)集成的心脏内BCI的I期试验。报告的数据跨越了植入后的第137天至1478年。设置:三级护理门诊康复中心。参与者:一名27岁的C5级A类(在美国脊柱损伤协会损伤量表上)创伤性脊髓损伤干预措施:在其左侧(主要)运动皮层中植入阵列后,接受了BCI-FES训练的参与者,以控制动态,辅助的,具有辅助的固定的固定的固定固定的固定固定剂,Wrist,Wrist和手动运动。主要结果措施:对ARM运动能力的标准化测试(对强度,敏感性和预性评估评估评估[GRASSP],行动研究ARM测试[ARAT],GRASP和释放测试[GRT],Box and Block测试),Grip肌度测试和功能活性测量的功能[CUE-TIPLIPE-STROTIA QUIFIA],QUADIA QUADIA QUADIA QUADIA QUADIA,有或没有BCI-FES的脊髓独立测量自我报告[SCIM-SR])。结果:随着BCI-FES的分数,分数从基线上提高了:握力(2.9 kg); Arat杯子,气缸,球,酒吧和块; grt罐,分叉,钉,重量和胶带;草p强度和预性(从瓶中倒出的盖子,转移钉子);以及提示曲手和手工技能。QIF-SFAND SICIM-SR饮食,美容和厕所活动有望改善BCI-FES的家庭使用。Pincer抓地力和移动性不受影响。BCI-FES抓地力技能使参与者能够玩改编的“战舰”游戏并操纵家庭对象。结论:使用BCI-FES,参与者执行了熟练和协调的抓手,并在上肢功能的测试中取得了显着的临床收益。练习从培训对象到家庭用品和休闲活动的练习。Palmar,横向和

带有触觉传感的机器人手的通用滑动检测
滑动检测是要识别抓握过程中对象是否保持稳定,这可以显着增强操纵灵量。在这项研究中,我们探索了能够执行各种掌握类型的五指机器人手的滑移检测,并在整个五个手指上检测到滑移,而不是专注于单个指尖。首先,我们构建了一个在六种抓地力类型的日常生活中收集的数据集,其中包括200 k个数据点。第二,根据深重下降的原理,我们为不同的抓握类型(USDConvnet-dg)设计了一个轻巧的通用滑动检测网络,以对掌握状态进行分类(无触摸,打滑和稳定的抓紧)。通过将频率与时域特征相结合,该网络的计算时间仅为1.26 ms,平均精度在验证和测试数据集上的平均精度超过97%,表明了强大的概括功能。此外,我们在现实世界中的实时掌握力调整中验证了提出的USDConvnet-DG,表明它可以有效地提高机器人操作的稳定性和可靠性。

应用于软机器人建模和控制的数据驱动方法:评论
摘要 - 软机器人表现出合规性,并具有无限的自由度。多亏了这些特性,可以利用此类机器人进行手术,康复,仿生,探索未经培养的环境和工业抓地力。在这种情况下,它们吸引了来自各个领域的学者。但是,非线性和滞后作用也给机器人建模带来了负担。遵循其灵活性和适应性,软机器人控制比刚性机器人控制更具挑战性。为了建模和控制软机器人,以成对或单独使用了大量数据驱动的方法。本评论首先简要介绍了两个用于数据驱动方法的基础,即物理模型和雅各布矩阵,然后总结了三种数据驱动方法,即统计方法,神经网络和增强学习。本评论比较了这些类别内外的建模和控制器功能,例如模型动态,数据要求和目标任务。最后,我们总结了每种方法的功能。对现有建模和控制方法的优势和局限性进行了讨论,我们预测了软机器人中数据驱动方法的未来。网站(https://sites.google.com/view/23zcb)是为此评论而构建的,将经常更新。
PEUGEOT 3008 手册
1. 天窗和遮阳帘控制器 2. 前部礼宾灯/地图阅读灯 3. 安全带和乘客前部安全气囊的警示灯显示 紧急呼叫和援助呼叫按钮 4. 后视镜 5. 平视数字屏幕 6. 声音警告,提醒其他道路使用者注意即将发生的危险 驾驶员前部安全气囊 7. 车门后视镜和电动车窗控制面板 8. 带音频系统的单色屏幕 蓝牙或触摸屏,带 PEUGEOT Connect 收音机或 PEUGEOT Connect 导航 9. 危险警告灯 10. 空调系统控制器 11. 12V 插座/USB 插座 无线充电器 12. 高级抓地力控制 上坡辅助下降控制 13. 点火开关或“启动/停止”按钮 14. 变速箱控制“运动”按钮 15. 电子驻车制动器 16. 乘客前部安全气囊 17. 手套箱 停用乘客前部安全气囊
sens:可持续供应链分析和基准测试的语义综合综合模型
摘要。供应链(SC)集成建模是对整个SC网络的成员和流程的可见性和主动监控所必需的。最近的工作已经建立了结合核心关系和结构的SC模型。但是,此类模型仍然相当孤立,从而阻止了SC的整体视图。我们确定缺乏端到端(E2E)SC数据,该数据能够对SC进行集成分析。一家公司的现有日志或数据不足以验证E2E SC模型。我们提出Sens,这是一种标准化的集成语义模型,可提供SCOR E2E SC结构和流的整体视图。此词汇用于生成合成的SC数据,以补偿通过Sens-Gen的总体基准数据的稀缺性。评估表明,通过SENS实现的显着改善的模拟和分析功能,促进了抓地力,控制并最终增强SC行为,并在破坏性场景中提高了弹性。
NCEA级别3生物学(91606)2023 - 第1页,共4页
注意:早期的人类素在同属属和早期同性恋之前。使用工具可以使早期人类能够获得比以前可用的更大的食品资源(例如骨髓 /坚果)。这增加了由于拥有更多卡路里的生存机会。第一个工具(Oldowan)是使用岩石一起敲打在一起的动力握把制成的,只需打几击即可创建一个边缘。这个单个简单的工具用于多种用途。功率握把使岩石能够牢固地握住,以确保当岩石被撞倒时碎片掉下来。功率抓地力也改变了对某些食物的使用,使得可以粉碎物品或进入难以获取的地方,从而导致更广泛的饮食。精度握把意味着可以使用更多的打击可以去除较小的薄片。这允许构建更精致 /操纵和专业的工具,从而使早期的直立访问更大的资源范围更大(候选人提供了例子)。这对脑大小(正反馈回路)产生了影响,从而进一步完善了工具使用。
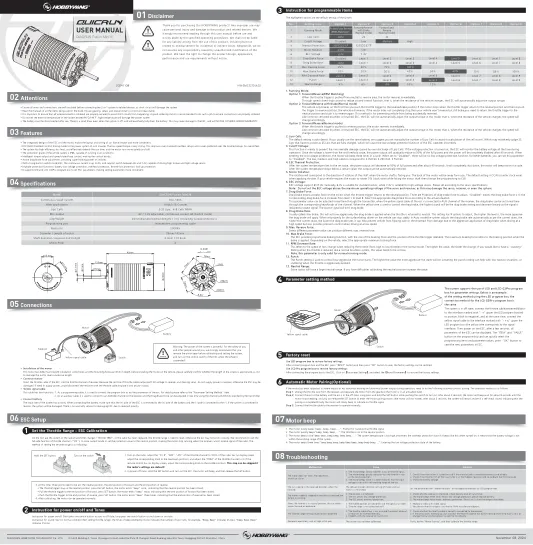
QUICRUN Fusion Mini16
• 电调与电机一体化设计,车架布局布线更加简洁便捷。 • 攀岩车动力系统采用FOC(磁场定向控制)驱动方式,低速扭力强劲,优于标准无刷驱动,整体手感优于有刷驱动。 • 系统效率高,发热量小,有效延长运行时间,电机运转更安静柔和。 • 整机防护等级达到IP66,全工况运行无忧。 • 智能扭矩输出与速度闭环控制,操控得心应手。 • 主动拖拽制动力调节,上坡时提供超强抓地力。 • 内置强效开关模式BEC,持续电流高达4A,支持6V/7.4V切换,可驱动大扭矩高压舵机。 • 多重保护功能:电池低压保护、过热保护、油门丢失保护、锁死保护。 • 支持LED、LCD两种G2/Pro编程盒设置电调参数,设置参数更加便捷。
引用:Alaaudeen,KM和Selvarajan,S和Manoharan,H和Jhaveri,RH(2024)智能机器人技术收获系统的水果过程,用于抓住P
本文提出并执行了一种基于深度学习的图像处理方法,用于自摘苹果。该系统包括一个轻巧的一步检测网络,用于水果识别。以及计算机视觉,以分析积分类别,并在抓取之前为每个水果提供正确的方法位置。使用高分辨率摄像头的原始输入,在RGB照片上进行了水果识别和实例分割。计算机视觉分类和抓地力系统是集成的,并提供了种植的食物的结果,作为每个苹果和橙色到机器人手臂执行的输入信息和输出方法的姿势。在从实验室和种植园环境中获取RGB图片数据之前,将评估开发的视觉方法。机器人收获实验是在室内和室外进行的,以评估拟议的收获系统的性能。研究结果表明,拟议的视力技术可以有效地控制机器人收获,而确切的情况下,在预测过程后,鉴定成功率的增加高于95%以上,而重新计算的重新计算不到12%。

Myokey:惯性运动感测和基于手势的QWERTY键盘扩展现实
摘要 - 在扩展现实(XR)的背景下对文本输入的挑战和社会接受,激发了新型输入方式的研究。我们研究了使用Qwerty-layout虚拟键盘应用于文本条目的惯性测量单元(IMU)控制和表面肌电图(SEMG)手势识别的融合。我们设计,实施和评估了名为Myokey的提议的多模式解决方案。用户可以通过手臂运动和手势组合选择字符。Myokey采用轻量级卷积神经网络分类器,可以在具有微不足道的推理时间上部署在移动设备上。我们通过在三种情况下招募12名参与者并测试了三组抓地力微观手机,证明了与Myokey无中断的文本条目的实用性:空手文本输入,三脚架抓握(例如,笔)和圆柱形掌握(例如,pen)。使用Myokey,用户的平均文本输入率为每分钟9.33个单词(WPM),8.76 wpm和8.35 wpm,分别为徒手,三脚架掌握和圆柱形掌握条件。

先进复合材料技术
Kordsa 成立于 1973 年,是 Sabancı Holding 的子公司,如今已成为轮胎和建筑加固、复合材料技术和复合材料领域的全球参与者。Kordsa 在四大洲 7 个国家/地区开展业务,包括土耳其、巴西、德国、印度尼西亚、泰国、意大利和美国,拥有 4,500 多名员工。通过提供高附加值的创新加固解决方案,Kordsa 旨在为其客户、员工、利益相关者和社区创造可持续价值,并实现“强化生活”的愿景。Kordsa 利用其轮胎加固技术加固了全球三分之一的汽车轮胎和三分之一的飞机轮胎,现在,Kordsa 能够利用其建筑加固技术加固飞机的着陆轨道,利用其复合材料技术加固飞机的机身、发动机、机翼和内饰。Kordsa 在轮胎行业提供环保产品,以降低油耗并提供更好的湿地抓地力,并在复合材料行业开发技术,以减轻车辆重量,降低油耗和碳排放。为建筑加固行业基础设施及上部结构项目提供更加耐用、实用的加固解决方案,为生活的方方面面增添独特的色彩。