XiaoMi-AI文件搜索系统
World File Search System拇指

应用说明 - 液态金属糊剂 TIM 用户指南
对于原型和极小批量的应用,手动涂抹液态金属糊剂非常常见。在这些情况下,液态金属糊剂可以装在带有拇指柱塞的注射器中。可以将所需量以单点形式分配到芯片或散热器上。强烈建议在涂抹前后使用秤来称量准确的沉积物。下一步是让材料固定在表面上,以便整个表面上形成相对较薄且均匀的层。实现此结果的最有效方法是使用棉签或刷子,然后在表面上来回擦拭液态金属糊剂。该动作将使材料充分固定在整个表面上。覆盖表面所需的确切量取决于两个表面的平整度。

国防部 ManTech 演示五角大楼 2024 年 6 月 4 日
随着实力相当的对手进入寒冷气候区,美国陆军重新将重点放在北极地区。这种转变增加了寒冷天气伤害的风险,特别是冻伤、浸水伤和体温过低。另一个相关问题是灵活性丧失,特别是拇指和扳机指,而这两者对于执行寒冷天气任务至关重要。在彻底审查了现有的最先进技术并深入研究了最新的寒冷天气生物学研究后,AFFOA 开发了一种动力前臂套,有助于保持手指灵活性并减少寒冷天气伤害。该研究所利用其对国内生态系统的了解来确定必要的技术,设计并制作了前臂套和手套的原型,集成了适用于北极的闭环加热系统和专门的高性能绝缘堆栈。
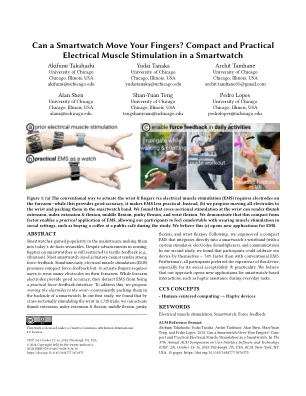
智能手表可以移动手指吗?智能手表中紧凑而实用的电肌刺激
图1:(a)通过电肌肉刺激(EMS)操作手腕和手指的常规方法需要前臂上的电极 - 虽然这提供了良好的准确性,但它使EMS的实用性降低了。相反,(b)我们建议将所有电极移动到手腕,然后将它们包装在智能手表频带中。我们发现手腕处的横截面刺激可以使拇指伸展,索引扩展和屈曲,中间屈曲,小指屈曲和手腕屈曲。我们证明,这种紧凑的形式可以实现EMS的实际应用,使我们的参与者可以在社交环境中佩戴肌肉刺激感到满意,例如在研究期间在公共咖啡馆购买咖啡。我们相信(c)为EMS打开了新的应用程序。

糖尿病上溃疡的蜂窝织炎:病例报告
案例介绍一名69岁的男子从3周前开始对溃疡,疼痛和肿胀的手术抱怨。他的手最初出现了一个向内生长的脚趾甲,然后在肿胀发生之前用大蒜处理。尽管患者过去曾患有糖尿病,但他从未服用过药物治疗。根据结果,将患者确定为糖尿病上的蜂窝织炎,右拇指溃疡。清理,修复,然后是适当的糖尿病疗法是患者医疗的一部分。结论蜂窝织炎是深层皮肤层中的一种感染,几乎可以发生在体内任何地方。,脚是糖尿病患者最脆弱的区域。需要检查感染部位以诊断蜂窝织炎。治疗取决于感染的严重程度。

设计师视觉注意在观察绘画现象中的作用
绘画的认知转变是通过神经和心理通路来解释的,位于“眼睛 - 视觉皮层 Vn”弧(光收集、视网膜对比度图、中央凹压缩、周边视觉、扫视分布、视觉分割、枕叶皮层)和“运动皮层 Mn - 手”弧(拇指、精细运动技能、触觉、躯体敏感性、运动前皮层、辅助运动区、小脑)之间,并汇聚在第三个弧“凝视网络 R fp - 手势”上:一个视觉运动界面和组成的区域(视觉空间注意、程序工作记忆、本体感受空间、后顶叶皮层、楔前叶、前额叶皮层、感觉运动模式)。绘画的神经生物学基础是通过感知和动作的同时空间映射来解释的,其中主要通过背部通路,将绘画置于大脑顶部。


鼠标处理和技术。 ...
捡起成年老鼠时,将它们轻轻但牢固地抓住在尾巴的底部或中心。不要用尾巴的尖端捡起它们。将动物放在钢笼顶部或盖子等表面上(图5A)。最好的表面不是光滑的或光滑的,因为如果老鼠的地位牢固,则表现得更加平静。保持尾巴,将另一只手的拇指和第一根手指放在下背部。轻轻向下并向前,直到到达脖子后部的额外皮肤,触摸耳朵。(图5b)。将松散的皮肤牢固地捏住(图5C),抬起鼠标,将尾巴拉到手腕上,并用戒指/小指固定尾巴(图5D)。如图所示,可以用最后两个手指握住尾巴(图5E)。您的抓地力应该足够坚硬,以防止鼠标挣扎,但足够温和,可以舒适地呼吸。
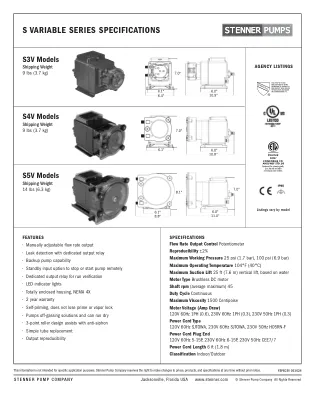
规格表模板
球校准阀组件(S4V,S5V) - 陶瓷球(FDA批准);坦塔尔姆春天; FKM座椅和O形圈或 - 陶瓷球(FDA批准);不锈钢弹簧; EPDM座位; Santoprene®O形旋风泵头辊(S3V,S4V)聚乙烯(S3V,S4V)聚碳酸酯泵头导胶(S4V,S5V)聚乙烯辊衬套(S3V,S4V,S4V)管配件,注射配件PVC或聚丙烯(均为NSF)连接螺母PVC或聚丙烯(均列出的NSF)3/8“适配器(S3V)PVC或聚丙烯(均为NSF列出的NSF列出的均固定型号)均未列出NOSEREM pVC或POLPORPORPYLEN(两个NSF)闩锁(S3V)聚丙烯泵头拇指螺旋体(S4V,S5V)不锈钢;
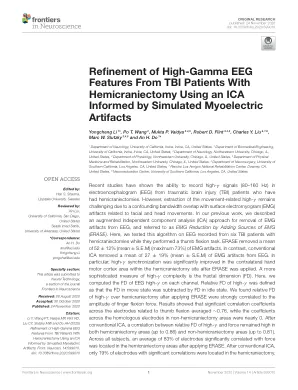
使用模拟的肌电伪影
最近的研究表明,能够记录患有半晶状体切除术的脑外伤(TBI)患者的脑电图(EEG)中高γ信号(80-160 Hz)。然而,由于与面部和头部运动相关的表面肌电图(EMG)伪影的混淆带宽重叠,因此提取与运动相关的高γ仍然具有挑战性。在我们以前的工作中,我们描述了一种增强的独立组件分析(ICA)方法,用于从EEG中删除EMG伪像,并通过添加EMG来源(ERASE)称为EMG降低。在这里,我们对六名Hemicraniectomies患者记录的EEG测试了该算法,同时他们执行了拇指流失任务。删除的平均值为52±12%(平均±S.E.M)(最大73%)EMG伪影。相比之下,常规ICA从EEG中删除了EMG伪像的平均值为27±19%(平均值±S.E.M)。尤其是,在擦除擦除后,在半晶切除术中的对侧手运动皮层区域中,高γ同步显着改善。更复杂的高γ复杂性是分形维度(FD)。在这里,我们在每个通道上计算了EEG高γ的FD。高γ的相对FD定义为移动状态下的FD在空闲状态下减去FD。我们发现,施加擦除后,高γ的相对FD与半骨切除术相对于半晶状分裂术,与纤维流量的振幅密切相关。的结果表明,与拇指流量相关的电极上的显着相关系数平均为〜0.76,而非流行性辐射切除术区域的同源电极的系数接近0。在常规ICA之后,在两个半开裂区域(最高0.86)和非流行颅切除术区域(最高0.81)中,高γ和力之间的相对FD之间的相关性均保持较高。在所有受试者中,使用擦除后,平均83%的电极与力显着相关。常规ICA后,只有19%的具有显着相关性的电极位于半晶切除术中。

拟人机械臂假肢的设计与实现
摘要:假肢的开发和制造是医疗技术发展的重要趋势之一。考虑到现代电子技术和自动化系统的发展及其机动性和紧凑性,实际任务是制造一种假肢,其拟人化特性接近功能齐全的人体肢体,并能够高精度地再现其基本动作。本文分析了电子假肢控制系统开发的主要方向。本文介绍了拟人假肢原型及其控制系统的实际实施描述和结果。我们开发了一种拟人化的多指假手,用于机器人研究和教学应用。设计的机械手是其他已知 3D 打印机械手的低成本替代品,具有 21 个自由度——每个手指 4 个自由度,拇指 3 个自由度,2 个自由度负责机械手在空间中的位置。所展示的机械臂的开源机械设计具有接近人手的质量尺寸和运动参数,具有自主电池操作的可能性,能够连接不同的控制系统,例如计算机、脑电图仪、触摸手套。