XiaoMi-AI文件搜索系统
World File Search System拇指
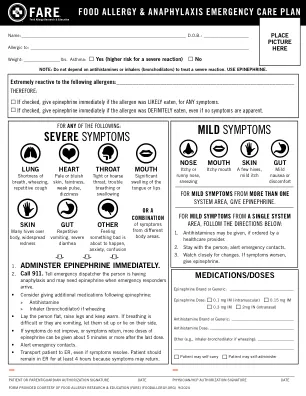
紧急护理计划(英文)
如何使用 NEFFY ®(肾上腺素鼻喷雾剂) 1. 从包装中取出 neffy。拉开包装取出 neffy 鼻喷雾剂装置。 2. 如图所示握住装置。用拇指握住柱塞底部,用手指握住喷嘴两侧。不要拉或推柱塞。不要测试或灌注(预喷)。每个装置只有 1 次喷雾。 3. 将喷嘴插入鼻孔,直到手指触碰到鼻子。将喷嘴笔直插入鼻子,指向前额。不要将喷嘴指向(倾斜)鼻中隔(两个鼻孔之间的壁)或鼻子外壁。 4. 用力向上按压柱塞,直到其弹起并将液体喷入鼻孔。服药期间或服药后请勿吸气。如果有任何液体从鼻子滴出,您可能需要在检查症状后再给予第二剂 neffy。 5. 如果在首次服药后 5 分钟内症状没有改善或恶化,请用新的 neffy 装置向同一鼻孔注入第二剂。
通过打印编程的记忆聚合物部件
许多潜在应用(包括生物医学应用)都需要复杂而实用的 SMP 部件功能和几何形状,这要求部件内具有相应复杂的应变模式,例如双轴、扭转、弯曲或剪切应变、应变梯度或其他空间变化应变。这些复杂的应变模式通常无法通过当前的编程技术实现,特别是对于小型或复杂部件几何形状的情况。事实上,复杂应变的精确编程仍然超出了形状记忆编程的当前水平,而且,由于在建立执行所需的机械驱动编程所需的设备方面存在挑战,甚至使用相对简单的 3D SMP 部件单轴编程替代方案(例如双轴应变编程)仍然极其有限。例如,3D 部件的多轴编程需要一种机制来抓住部件并在多个轴上施加所需的分布应变。因此,迄今为止,只有少数研究成功展示了 3D SMP 部件的多轴编程,而且这些研究仅限于压缩编程,使用手动(实际上是手指和拇指)操作或专门的压接器或夹具实现,[8,16] 因此只展示了膨胀多轴恢复。缺乏用于
访客将信息技术资产带入 FBI 空间的请求
本表的目的 本表用于对获授权访客进入 FBI 空间的信息技术 (IT) 资产进行安全评估和授权。IT 资产包括便携式电子设备 1 (PED)、笔记本电脑、其他电子设备(即录音机、视频投影仪等...)以及可用于管理层会议或诉讼活动的可移动电子存储设备 2。此外,1061PG《移动设备和移动应用政策指南》要求提供笔记本电脑进入和使用 FBI 设施的理由和使用时间段。1PED 是指任何具有记录、存储和/或传输数据、语音、视频或图像的一种或多种功能的非固定电子设备。这包括但不限于个人数字助理、袖珍个人电脑、掌上电脑、MP3 播放器、蜂窝电话、摄像机、图书阅读器和寻呼机。 2 可移动电子存储设备是指任何便携式电子存储介质,例如磁性、光学和固态设备,可插入和从计算设备中移除,用于存储和传输文本、视频、音频和图像信息。此类设备没有独立的处理能力。这包括但不限于 zip 驱动器、光盘、拇指驱动器和类似的 USB 存储设备。

在矛盾的视觉和触觉提示下,在虚拟环境中对软对象的感知
摘要 - 在虚拟/增强/混合现实(VR/AR/MR)中,使用手持式触觉设备渲染软虚拟对象,这是由于手工的解剖学限制以及设计的未接地性质,这会影响执行器和传感器的选择,从而限制了由该设备显示的强制性和范围的选择。我们开发了一种电缆驱动的触觉设备,用于渲染涉及抓紧和挤压3D虚拟物体(软)物体(软)对象的净力,仅在索引纤维和拇指之间。使用建议的设备,我们研究了虚拟环境中软对象的感知。我们表明,可以通过控制视觉和触觉提示之间的关系来大大扩展对象刚度的范围,可以有效地传达给虚拟环境(VES)中的用户。我们提出,一个称为明显的刚度不同的单个变量可以预测操纵冲突下人类僵硬感知的模式,该变量可用于使VES中的一系列柔软物体用于比单独的触觉设备所能实现的范围更大的柔软物体。
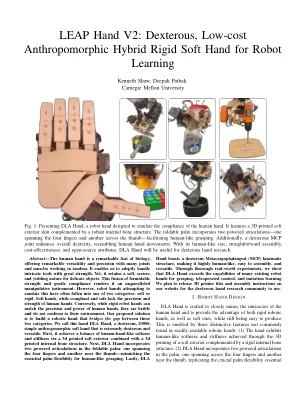
Leap Hand V2:灵巧,低成本的拟人化杂交刚性刚性软手,用于机器人学习
摘要 - 人类的手是生物学的非凡壮举,具有许多关节和肌肉的同时,具有出色的多功能性和精度。它使我们能够以极大的力量处理复杂的工具。然而,它保留了柔软,安全且屈服于精致物体的性质。强大的强度和柔和的合规性融合使其成为无与伦比的操纵仪器。但是,试图模拟这一点的机器人之手通常属于两个类别之一:软或刚性。柔软的手,虽然符合性和安全性缺乏人类手的精度和力量。相反,虽然刚性机器人的手可以与人体的精确性和力量相匹配,但它们是脆弱的,不符合其环境。我们提出的解决方案是建立一个机器人手,弥合这两个类别之间的差距。我们称此手DLA手,一种灵巧的,$ 3000,简单的拟人化软手,非常灵巧且多才多艺。首先,它通过3D打印的软外部与3D打印的内部骨结构相结合,达到了人体手状的柔软度和刚度的平衡。接下来,DLA手在可折叠的棕榈中结合了两个动力的表达:一个横跨四个手指,另一只手指靠近拇指,模仿了类似人类的握把的基本棕榈灵活性。最后,DLA

假肢师的仿生手臂
摘要 - 仿生手臂在截肢者的康复中起着重要作用,也有助于恢复他们的自信。在假肢的帮助下,人们的生活发生了巨大的变化,因为它们增加了活动能力,方便了日常琐事的完成,并提供了独立生活的手段。仿生手臂的工作取决于从截肢者肌肉收集的信号。当截肢者使用仿生手臂并弯曲其残肢肌肉时,特殊传感器会检测到自然产生的电信号,并将其转换成适当的仿生手部动作。仿生手臂只需思考要执行的动作即可充当真正的肢体。身体神经元产生的微小电信号有助于控制这些动作。它们由肌肉收缩产生,可以通过用户能够感觉到的皮肤上的电极进行测量。插入假肢轴的两个电极用于检测肌电信号,这些信号被传送到控制电子设备,然后这些信号被放大并用于激活五个电动机(每个手指一个),这些电动机移动手指和拇指,手会自动张开或闭合。因此,肌肉收缩的强度控制着速度和抓握力:弱信号产生缓慢的运动,强信号产生快速的运动。
与雷诺现象的全身性硬化症中腹手指微举病的超声定量评估:一项比较研究
使用各种超声技术评估使用Raynaud现象(RP-SSC)的全身性硬化症患者的手指血管性的抽象目标。使用四种超声血管成像技术在室温下成像18种RP-SSC患者的所有手指(拇指)和18个对照。通过计算25 mm 2正方形的血流像素以背侧侧的指甲褶皱和25 mm 2和距腹侧100毫米2平方平方的25 mm 2平方计算血管面积的百分比。平均血管强度是根据背侧和腹侧的相应区域计算的。结果,RP-SSC中血管区域和平均血管强度的百分比明显低于背侧和腹侧的对照组(P <0.01)。无论成像技术和评估方面如何,曲线下的平均血管强度(AUC)(AUC)(AUC)的面积略高于(AUC)(AUC)(0.53-0.91 vs 0.53-0.90)。对于每种成像技术,与背侧相比,腹侧血管表现出更高的AUC(0.74–0.91)(0.53-0.81)。此外,腹侧异常与数字溃疡病史有关。结论超声表现出了量化RP-SSC的手指血管性的潜力。手指的腹侧显示出比背侧比背侧更高的精度。
欧洲空中导航安全组织 ATM 监视系统性能规范(第 1 卷)
利益相关方报告的细微更正。第 1 卷 在执行摘要末尾添加新段落。表 3 和表 4(以 R4 为后缀的要求)中的措辞一致(将 meter 替换为 m)且错误(将 below 替换为 above)。更正表 3 和表 4(以 R8、R10 和 R11 为后缀的要求)中的注释编号(将 7 替换为 9)。更正表 3 和表 4(以 R14 为后缀的要求)中的注释编号(将 8 替换为 10)。协调表 4 和表 7 中以 R5 为后缀的要求措辞(“至少 3 个连续的...系列”)。重新措辞 § 3.4.5 中注释 8 的措辞,在表 6 和表 7(以 R4 为后缀的要求)中进行说明(将 meter 替换为 m 并添加 global)。更正了 § 4.2.9、4.2.13 和 4.2.14 中的引用(4.2.4 代替 4.2.2)。更正了 § 4.2.12(飞机标识代替压力高度和“以下 3 个数字……”)。在特定应答器接口(拇指轮开关)的情况下,飞机标识正确性指示器的附加说明。更新了附件 B 中的文件超链接和/或版本。重新措辞了附件 C – 1.2 中的飞机标识定义。第 2 卷将执行摘要与第 1 卷的执行摘要对齐。

北卡罗来纳州A&T州立大学Bluford Street宿舍委托服务大楼信封,机械,电气,管道和Irrig
认证:该项目中选择的调试代理必须是北卡罗来纳州的注册工程公司,并满足所有州建设要求。工作范围:我们正在寻找CXA来评估建筑文档,完成的建筑物和建筑物中所有支持系统。请参阅州建设网页的国家建设指南 - “形式和文件” - 能源账单授权:建筑物项目现场的调试北卡罗来纳州A&T州立大学的地址,位于北卡罗来纳州East Market Street,Greensboro,NC 27411。该项目位于Bluford Street和Stewart St.设计过程的拐角处,所选公司将通过NC A&T州立大学工程师和州建筑业办公室工作。关键的选择因素感兴趣的公司可以通过提交当前的SF 330表格并在书面提案中解决以下内容来参与该过程。请注意,请求在提案的拇指驱动器上进行两份硬副本和一个电子副本。长度应限制为20页(单面= 20页,双面= 10页),不包括SF330。公司被要求在2023年9月5日下午3点之前列出的地址确保收到提案。请在建议中包含以下信息:
欺骗您的眼睛在大脑上发挥作用 - 错觉
1。将纸放在您前面的桌子上,长侧位于水平位置。将您的非写入手放在纸张中间。将手指稍微分开,但指向。应该指出您的拇指。2。用铅笔追踪您的手。请确保将铅笔上下握住,而不是倾斜。小心地围绕着手指而不是在手指上画。花点时间。3。用尺子在纸张的左侧和右边缘放置一个小点。使用标尺引导您,从页面上水平绘制直线平行线(从左边缘标记到右边缘标记),从左边缘的点到右边缘的相应点。不要在您伸出手的地方绘制直线直线。当您伸到手上,向上绘制曲线,然后向下划清曲线以满足另一侧的匹配平行线。曲线之间的空间应为相同的宽度。4。重复绘制直线和弯曲的平行线,直到填充纸。5。在指关节所在的手上画一条直线。6。每个手指上的线将从平行线上弯曲,并平行于曲线的开头。在手指之间拉直线。通过示范 - 直线,曲线进行交谈;直线,曲线;直线,曲线;直线,曲线;直线,曲线;直线。在这些水平线上保持平行的距离。