XiaoMi-AI文件搜索系统
World File Search System拖运

cat®Minestar™拖运命令管理...
关于卡特彼勒(Caterpillar):Caterpillar Inc. 2023年的销售额和收入为671亿美元,是世界领先的建筑和采矿设备,越野柴油和天然气发动机,工业燃气轮机和柴油机运动的领先制造商。近100年来,我们一直在帮助客户建立一个更好,更可持续的世界,并致力于减少碳的未来。由我们的全球经销商网络支持的我们的创新产品和服务提供了帮助客户成功的非凡价值。Caterpillar在每个大陆开展业务,主要是通过三个主要领域运营的建筑行业,资源行业以及能源与运输 - 并通过我们的金融产品领域提供融资和相关服务。通过Caterpillar.com访问我们,或通过Caterpillar.com/en/news/social-media.html在我们的社交媒体渠道上加入对话。
州拖运委员会通过 2025 年战略计划
2024 年是俄勒冈州拖车委员会运营的第一年,重点关注基础设施和运营要求:• 通过初步行政规则、使命宣言和章程。• 审查投诉以确定首要合规问题和委员会的监管重点。• 建立合规计划,包括制定投诉政策、投诉流程和实施案件管理系统。• 通过两项公共政策,解决投诉中显示的两个最大合规问题。• 开展多项外展活动,重点关注执法机构、拖车行业以及对私人停车设施和住宅区感兴趣的个人、倡导者和组织。• 让合作伙伴、公众、投诉人和拖车行业参与审查法律和确定期望。委员会的 2025 年战略计划侧重于三个优先事项:
州拖运委员会 2025 年战略计划
2024 年是俄勒冈州拖车委员会运营的第一年,重点关注基础设施和运营要求:• 通过初步行政规则、使命宣言和章程。• 审查投诉以确定首要合规问题和委员会的监管重点。• 建立合规计划,包括制定投诉政策、投诉流程和实施案件管理系统。• 通过两项公共政策,解决投诉中显示的两个最大合规问题。• 开展多项外展活动,重点关注执法机构、拖车行业以及对私人停车设施和住宅区感兴趣的个人、倡导者和组织。• 让合作伙伴、公众、投诉人和拖车行业参与审查法律和确定期望。委员会的 2025 年战略计划侧重于三个优先事项:
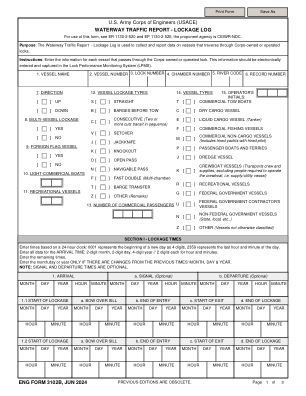
水路交通报告 - 封锁日志
I - 配备艏推力器的拖船 J - 仅由绞车或凯维尔等拖船拖运设备辅助的驳船 K - 使用了液压辅助设备辅助船舶。这包括打开船闸阀门以协助下行拖船。仅在获得授权时使用。 L - 使用了额外人员协助船舶。这些人员可能是船闸操作员或船舶人员,他们通常不会协助船舶。 N - 拖船和驳船均由绞车或凯维尔等拖船拖运设备辅助 Z - 提供了其他形式的协助。如果发生这种情况,请在下面的备注部分描述此援助

比较分析:使用离散事件模拟评估电池和柴油机负载拖运(LHD)单位的生产力(DES
在地下硬岩地雷中使用电池电动汽车(BEV)由于消除柴油排气气,柴油机颗粒物(DPM)和降低空气温度而改善工作条件的能力,因此获得了吸引力。这将使矿山更容易遵守越来越严格的职业健康与安全(OH&S)规定,并使地下矿山环境更健康。此外,由于其能源效率较高,BEV比柴油机消耗的能源更少。所有这些示例将提高地下采矿作业的效率。柴油机由于其高生产率而在开采中已使用了很长时间。目前的BEV是否可以匹配柴油机的生产率。使用BEV时,诸如所需数量的电池和充电站等方面,交换时间和交换间隔是可能影响其生产率的方面。因此,使用来自可行性研究阶段的块洞穴矿山的矿山设计数据,使用竞技场软件进行离散事件模拟(DES)分析。分析的目的是使用两种不同的拖运策略,可用的可用性以及机器的速度来评估两个等效18吨重载量转储(LHD)单位的生产率:柴油和电池供电。结果表明,拖运策略和速度对所需的机器数量有重大影响,并且在使用等效齿轮时,电池机的生产率平均可以比等效柴油机高6.5%至10.3%。这项工作是作为智能智能采矿系统项目(Nexgen Sims,www.nexgensims.eu)的下一代碳中性飞行员的一部分完成的,该飞行员由欧盟资助。

矿井连续运输导航传感器
在开采和运输煤炭的过程中,操作员在狭窄的矿井内可能会被移动机械撞击或抓到。解决此问题的方法是使用运输设备上的导航系统,使其跟随开采煤炭的机器。这实际上涉及基于传感器的机器对接。能够承受恶劣的矿井环境(包括灰尘、甲烷气体和水)的传感器起着关键作用。对采矿机的运动和经验机器特性进行计算机分析,以确定操作要求和空间限制,以确保将煤炭正确装入运输设备。这些数据用于选择传感系统。扫描激光系统和超声波传感器等各种技术经常用于其他应用,但被发现不可接受。然而,采用主动目标的近红外 (IR) 传感器满足要求。该传感器具有标称 75 EE 锥形视场和 0.1 至 18.0 m 的范围。对于单目标模式,在 3.56 米的距离处,标称范围精度为 4.3%。生成了校正算法,将误差降低至 0.6%。空气中的灰尘测试表明,在超过联邦法律允许的浓度(7.5 倍)的水平下,精度(最坏情况)下降不到 0.8%。该传感器可以跟踪多个活动目标,提供五个自由度 (DOF) 测量。使用四个目标,标称范围精度为 0.4%,无需校正算法。III. 当前操作场景 拖运系统跟随采矿机的制导系统在商业上不存在。这样的系统可以减少当前拖运采矿设备造成的死亡和伤害,并且是当前拖运控制的可行替代方案。
矿井连续运输导航传感器
在开采和运输煤炭的过程中,操作员在狭窄的矿井内可能会被移动机械撞击或抓到。解决此问题的方法是使用运输设备上的导航系统,使其跟随开采煤炭的机器。这实际上涉及基于传感器的机器对接。能够承受恶劣的矿井环境(包括灰尘、甲烷气体和水)的传感器起着关键作用。对采矿机的运动和经验机器特性进行计算机分析,以确定操作要求和空间限制,以确保将煤炭正确装入运输设备。这些数据用于选择传感系统。扫描激光系统和超声波传感器等各种技术经常用于其他应用,但被发现不可接受。然而,采用主动目标的近红外 (IR) 传感器满足要求。该传感器具有标称 75 EE 锥形视场和 0.1 至 18.0 m 的范围。对于单目标模式,在 3.56 米的距离处,标称范围精度为 4.3%。生成了校正算法,将误差降低至 0.6%。空气中的灰尘测试表明,在超过联邦法律允许的浓度(7.5 倍)的水平下,精度(最坏情况)下降不到 0.8%。该传感器可以跟踪多个活动目标,提供五个自由度 (DOF) 测量。使用四个目标,标称范围精度为 0.4%,无需校正算法。III. 当前操作场景 拖运系统跟随采矿机的制导系统在商业上不存在。这样的系统可以减少当前拖运采矿设备造成的死亡和伤害,并且是当前拖运控制的可行替代方案。
矿井连续运输导航传感器
在开采和运输煤炭的过程中,操作员在狭窄的矿井内可能会被移动机械撞击或抓到。解决此问题的方法是使用运输设备上的导航系统,使其跟随开采煤炭的机器。这实际上涉及基于传感器的机器对接。能够承受恶劣的矿井环境(包括灰尘、甲烷气体和水)的传感器起着关键作用。对采矿机的运动和经验机器特性进行计算机分析,以确定操作要求和空间限制,以确保将煤炭正确装入运输设备。这些数据用于选择传感系统。扫描激光系统和超声波传感器等各种技术经常用于其他应用,但被发现不可接受。然而,采用主动目标的近红外 (IR) 传感器满足要求。该传感器具有标称 75 EE 锥形视场和 0.1 至 18.0 m 的范围。对于单目标模式,在 3.56 米的距离处,标称范围精度为 4.3%。生成了校正算法,将误差降低至 0.6%。空气中的灰尘测试表明,在超过联邦法律允许的浓度(7.5 倍)的水平下,精度(最坏情况)下降不到 0.8%。该传感器可以跟踪多个活动目标,提供五个自由度 (DOF) 测量。使用四个目标,标称范围精度为 0.4%,无需校正算法。III. 当前操作场景 拖运系统跟随采矿机的制导系统在商业上不存在。这样的系统可以减少当前拖运采矿设备造成的死亡和伤害,并且是当前拖运控制的可行替代方案。

地球和矿业行业的演讲
从一个OEM中消除操作员并减少人为错误数据•600辆自动驾驶卡车运行•全球25个客户站点•超过59亿吨的拖运材料•每天驱动99,000英里(地球周围4次)•> 1.27亿英里(> 1.27亿英里(与火星)•7x24x365•7x24x365)