XiaoMi-AI文件搜索系统
World File Search System指尖
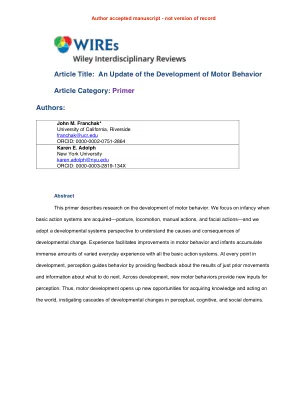
运动行为发展的更新。
图1。在四个动作系统中从A到Z的运动开发 - 稳定,运动,手动动作和面部动作。末端的所有动作都嵌套在姿势中,包括:仰卧(a),俯卧(b),三脚架坐着(c),独立坐姿(d)和站立(e)。姿势之间的过渡(f,g)使婴儿可以自由选择如何瞬间移动。婴儿在学会走路之前使用创意手段,例如原木滚动(h),腹部爬行(i),搭便车(J),手和knees爬行(K),bum-shuffling(L)和膝盖步行(M)。直立步行(n)与所有动作一样,通过练习进行了完善。与俯卧(O)或仰卧(a)相比,坐着(p)为达到和手动探索提供了稳定的支持基础。婴儿可以完善其从手掌(Q)到指尖握把(R)的物体的能力,并学会握住具有越来越实用的握把的工具(S,T,U)。面部动作涉及协调饮食(v),微笑(W)和发声(x)的动作。婴儿的外观和视觉探索周围环境的能力取决于眼睛和头部嵌套在体内的运动,这意味着,坐着(y)婴儿可以看到越来越高的人,而易于(z)。在NIH婴儿工具箱(A-O,Q-U,X,Y)和Kelsey West(P,V,W,W,Z)的许可下重印。

新型术中在线体感手指表征功能映射,用于有针对性的刺激电极放置
刺激电极放置 David P. McMullen,医学博士,1 Tessy M. Thomas,理学士,2 Matthew S. Fifer,博士,3 Daniel N. Candrea,理学硕士,2 Francesco V. Tenore,博士,3 Robert W. Nickl,博士,4 Eric A. Pohlmeyer 博士,3 Christopher Coogan,理学硕士,5 Luke E. Osborn,博士,3 Adam Schiavi,医学博士,博士,6 Teresa Wojtasiewicz,医学博士,7 Chad Gordon,DO,8 Adam B. Cohen,医学博士,3,5 Nick F. Ramsey,博士,9 Wouter Schellekens,博士,9 Sliman J. Bensmaia,博士,10 Gabriela L. Cantarero,博士,4 Pablo A. Celnik,医学博士,4 Brock A. Wester,博士,3 William S. Anderson,医学博士,博士,7 Nathan E. Crone, MD 5 1 美国马里兰州贝塞斯达市国立卫生研究院国家精神卫生研究所 2 美国马里兰州巴尔的摩市约翰霍普金斯大学生物医学工程系 3 美国马里兰州劳雷尔市约翰霍普金斯大学应用物理实验室研究与探索性开发部 4 美国马里兰州巴尔的摩市约翰霍普金斯大学物理医学与康复系 5 美国马里兰州巴尔的摩市约翰霍普金斯大学神经病学系 6 美国马里兰州巴尔的摩市约翰霍普金斯大学麻醉学与重症监护医学系 7 美国马里兰州巴尔的摩市约翰霍普金斯大学神经外科系 8 美国马里兰州巴尔的摩市约翰霍普金斯大学整形与重建外科系 9 荷兰乌得勒支市联合医学中心乌得勒支脑中心 10 美国伊利诺伊州芝加哥市芝加哥大学生物与解剖学系 60637 摘要 定义传统上,神经外科医生在术中对功能皮质进行定位以保留患者的功能,现在可以帮助植入目标电极以恢复功能。脑机接口 (BMI) 有可能恢复瘫痪患者的上肢运动控制,但需要准确放置记录和刺激电极才能对假肢进行功能控制。除了从记录阵列进行运动解码之外,在与手指和指尖感觉相关的皮质区域精确放置刺激电极还可以传递感觉反馈,从而改善对假手的灵巧控制。在我们的研究中,我们展示了使用一种新颖的术中在线功能映射 (OFM) 技术和高密度皮层脑电图 (ECoG) 来定位人类初级体感皮质中的手指表征。结合传统的术前和术中定位方法,该技术能够准确植入刺激微电极,这通过植入后对手指和指尖感觉的皮质内刺激得到了证实。这项研究证明了术中 OFM 的实用性,并将为人类闭环脑机接口的未来研究提供参考。关键词术中功能映射;在线功能映射;脑机接口;皮层内微刺激;微电极阵列 (MEA);皮层电图 (ECoG)

...
电动汽车是蓬勃发展的技术。性能和可靠性取决于电池的可持续性和适应性。电动汽车需要最佳的温度(既不温暖也不冷)才能有效运行。最佳温度对于电池组,电动电子系统和电动汽车中电动机的适当工作至关重要。保持在最佳温度时,保留电池电量,健康和容量。电力电子系统和电动机在最佳温度下展示了它们最佳的工作形象。如果不进行热管理,温度将升高,并且会导致电池快速衰老,并且有可能发生某些火灾危害。低温导致电池容量和能量密度的降解。因此,我们正在通过主动浸入冷却为电池开发热管理系统。主动空气冷却从空调中获取空气摄入量,其中包括蒸发器和加热器以控制空气的温度。主动冷却系统通常比被动冷却系统更好。我们将采用主动脱水冷却,其中硬件将沉浸在具有高导热率的介电中。对于任何电池,都会有电池管理系统。bms是一种电子系统,通过保护电池免受安全操作区域的操作,监视其状态,计算辅助数据,报告数据,控制其环境并平衡它来管理可充电电池的电池。IOT启用BMS是一项新型技术,它将监视和控制所有设备,包括在一个地方具有多个协议的传感器和网关。 该平台还为大型设备网络提供了远程配置功能和组管理功能。 使用IoT启用BMS的主要优点之一是,它在估计SOC和SOH等电池参数时的准确性。 IoT是一个相互关联的计算设备,机械和数字机器,对象的系统,它们提供了唯一的标识符(UID),并且能够通过网络传输数据而不需要人类对人类或人为计算机的交互。 物联网,是指连接设备的集体网络以及促进设备与云之间以及设备本身之间通信的技术。 物联网在智能家居中的应用:IoT允许您连接所有家庭应用,例如空调,照明,锁,恒温器,盗窃警报系统,以及何种系统,并用智能手机在指尖上控制控制。 因此,IoT启用BMS将来具有范围。IOT启用BMS是一项新型技术,它将监视和控制所有设备,包括在一个地方具有多个协议的传感器和网关。该平台还为大型设备网络提供了远程配置功能和组管理功能。使用IoT启用BMS的主要优点之一是,它在估计SOC和SOH等电池参数时的准确性。IoT是一个相互关联的计算设备,机械和数字机器,对象的系统,它们提供了唯一的标识符(UID),并且能够通过网络传输数据而不需要人类对人类或人为计算机的交互。物联网,是指连接设备的集体网络以及促进设备与云之间以及设备本身之间通信的技术。物联网在智能家居中的应用:IoT允许您连接所有家庭应用,例如空调,照明,锁,恒温器,盗窃警报系统,以及何种系统,并用智能手机在指尖上控制控制。因此,IoT启用BMS将来具有范围。

开发镜像治疗设备
摘要。先前关于大脑活动和动作之间互连的研究导致发现了镜像神经元,神经元具有两个特别重要的作用:它们基于视觉信息介导了模仿运动的模仿,并且是对动作的理解的基础。镜像疗法是一种基于视觉反馈在恢复中的使用,是一种相对较新的非侵入性治疗。自1996年以来,它一直在医疗康复计划中引入,以诸如:中风后的偏瘫,中风后的偏瘫,步态恢复,帕金森患者的指尖改善,减轻幻影肢体疼痛的减轻,截肢后的幻影症和手动疼痛的慢性疼痛,骨关节炎,纤维肌痛和复杂的区域疼痛。本工作主题的设备展示了镜像盒的新建设性变体,该变体在上肢和下肢的水平上提供了一种更有效的方法来应用镜像疗法。对视觉刺激在恢复中的有效性进行了两次评估的结果,在该设备的帮助下进行,首先是关于缺血性中风后瘫痪的受试者的手动功能的恢复,并在治疗手动骨关节炎的受试者慢性疼痛方面进行了第二次评估。关键字:镜像疗法,视觉反馈,神经塑性,动力学记忆,中风,幻影肢体疼痛rezumat。dezvoltarea unui dispozitiv pentru terapiaoglindă。terapia prin oglindire este o terapie相对nouă,先前关于大脑与动作之间互连的研究导致发现了镜像神经元,神经元具有两个非常重要的角色:它们基于视觉信息介导模仿运动,并且是理解动作的基础。

触觉增强的完整上肢外骨骼接口
摘要:操纵既涉及精细的触觉反馈,又涉及FingerPad机械感受器感知的动态瞬变,也涉及动态触觉反馈,而动态触觉反馈则涉及整个手肌肉骨骼结构。在远程操作实验中,这些基本方面通常在操作员侧的不同设置之间进行分配:使用轻质手套和光学跟踪系统的那些设置,朝向仅触觉反馈的那些,以及那些实现外观骨骼或接地操纵器作为具有抗hepticic设备的hepticic设备,可提供KinaEsticic Enceptics。在手界面的水平上,提供动力学力反馈的外骨骼在最大渲染力和嵌入式执行器的带通之间进行了权衡,从而使这些系统无法正确地呈现触觉反馈。为了克服这些局限性,在这里,我们研究了一个完整的上肢外骨骼,覆盖了从肩部到手指裂料的所有上肢身体部位,并在指尖与线性语音盘绕器执行器结合。这些是为了呈现宽带触觉反馈以及手部外骨骼提供的动力学力反馈。在两个不同的反馈条件下(仅视觉和视觉供应),我们将在采摘远程操作任务中调查系统。根据测量的相互作用力和正确试验的数量进行了评估和比较。这项研究证明了能够组合的动觉和触觉触觉反馈的复杂的全肢外骨骼(七个肢体驱动的DOF加五个手动DOF)的总体可行性和有效性。定量结果表明,当提供触觉反馈时,尤其是对于均值和峰值施加的力,以及拾取和地位任务的正确速度时,效果的改善显着。

使用MediaPipe和OpenCV -IJRPR
随着技术的快速发展,电子产品每天都在越来越小。现在有无线设备。这项研究提出了一种机制,该机制可能会导致一些将来会塑造HCI(人为计算机相互作用)的小工具。这个想法是使用手势识别来创建虚拟鼠标。目标是用简单的摄像头替换传统或普通的鼠标设备,以控制鼠标光标的功能。仅使用相机,虚拟鼠标可作为用户和计算机之间的管道起作用。它促进了鼠标功能,并允许用户与机器连接,而无需任何物理或机械设备。使用网络摄像头或内置摄像头拿着彩色帽子或彩色粘纸纸,使用这种手势识别技术很有可能记录和跟踪手的指尖。系统将跟踪手的颜色和移动,并与之同时移动光标。通常,我们使用鼠标,键盘或其他交互设备,这些设备主要与计算机计算机紧凑。无线设备还需要电源和连接技术,但是在本文中,用户的裸手是使用网络摄像头的唯一输入选项。因此,这是控制鼠标光标的一种非常互动的方法。使用基于计算机愿景的库OpenCV以Python编程语言实现此系统。该系统有可能替换典型的鼠标和机器的遥控器。唯一的障碍是照明条件。这就是为什么系统仍然不足以替换传统鼠标的原因,因为大多数计算机都在较差的照明条件下使用。

基于物联网的光学启动仪的设计和开发
摘要:这项研究介绍了使用糖尿病监测的光学方法的基于物联网的非侵入性血糖仪的开发。糖尿病需要尽快识别,并密切监测其发育。控制这种疾病的措施之一是使用糖素对血糖水平进行每日监测。市场上的葡萄仪是侵入性的,需要血液采样或传感器植入。要获取血液样本,有必要用针刺指尖获得血液样本。此过程不舒服,并且反复穿刺会增加传染病传播的风险。或者,本文提出了一种使用光学技术的非侵入性方法。原型设备主要由NIR LED(940nm)组成,该nir用作通过手指传递的光发射器,并反射为光电探测器(BPW34),该发射器(BPW34)充当光接收器。使用Arduino Cloud用于监视目的,该原型与IoT平台集成在一起。下一步涉及校准模型的开发。招募了十个健康的人参加由国家肾脏基金会Batu Pahat进行的葡萄糖读数测量。从该实验中成功获得了校准模型(𝑦=82.19𝑥+ 12.91)。开发的设备的准确性在93.2%至96.9%之间,发现错误百分比小于7%。总而言之,成功开发了一种无痛的非侵入性根源近红外LED和光电二极管。为了将来开发,可以使用更长的光发射器(例如1500 nm)来提高系统的准确性。关键字:糖尿病,糖仪,近红外(NIR),物联网(IoT),非侵入性

连续葡萄糖监测
描述性叙事连续葡萄糖监测(CGM)测量间质葡萄糖,这与血浆葡萄糖很好地相关。CGM设备有两种基本类型:向成员提供无盲数据的设备,以及那些对成员可用的数据及其医疗保健提供商进行回顾性分析的数据。对于提供不盲数据的设备,大多数已发布的随机对照试验(RCT)都是使用具有警报和警报的实时CGM设备执行的。很难确定拥有这些通知对葡萄糖水平的反应产生的影响。有一项针对低血糖症风险患者的小型研究,将实时CGM与间歇性扫描的CGM进行比较。这项研究表明,用实时CGM在低血糖中花费的时间有所改善。某些实时系统需要用户校准,该系统的频率取决于设备。此外,对于某些CGM系统,FDA建议用于做出治疗决策的SMBG(自我监测的血糖)。需要SMBG确认的设备称为“辅助性”,而不称为“非调节性”的设备。 226名成年人的RCT建议,在患有良好控制的1型糖尿病的成员中,可以安全有效地使用CGM设备,而严重低血糖症的风险低。FDA批准了两个CGM设备,用于在没有SMBG校准或确认的情况下做出治疗决策。实时读数允许成员监视指示葡萄糖问题的警报并立即采取纠正措施。gm是通过放置皮下传感器使用的三个组件(发射器,接收器和传感器)的三个组件(发射器,接收器和传感器)的设备,可连续监测和记录从间质流体获得的葡萄糖水平。此设备不能替代指尖读数。如果获得批准,则预计CGM将在大多数几周内每周至少6天连续使用。

日本备前市接种第三剂和第四剂 SARS-CoV-2 疫苗后的抗体滴度
需要更多有关这些加强剂后的免疫反应动态的信息,尤其是在脆弱人群中。因此,我们研究了包括老年人在内的普通人群在接种第三剂和第四剂疫苗后抗体滴度的变化。备前 COVID-19 抗体测试项目是一项以社区为基础的调查,于 2022 年 6 月 3 日开始,每 2 个月对日本西部冈山县备前市的居民进行一次抗体滴度测量。该研究经冈山大学医院伦理委员会批准 (编号 2205-061),所有参与者均提供了书面知情同意书。我们直接从当地居民中或通过当地机构(如疗养院、市政厅和市内的其他机构)招募了 1,956 名 18 岁或以上的参与者。在本分析中,我们纳入了至少接种了第三剂疫苗且没有 COVID-19 感染史的参与者的抗体滴度第三次测量值,这在自我报告问卷中得到了证实。这共计从 1,862 名参与者中获得了 2,868 次测量值(第一次测量 937 次;第二次测量 966 次,第三次测量 965 次)。其中,1,720 名参与者(92.4%)进行了多次测量(即两次以上测量)。我们收集了指尖全血样本(30 µL),并使用 Mokobio SARS-CoV-2 IgM & IgG 量子点免疫测定法(Mokobio Biotechnology R&D Center Inc.,美国马里兰州罗克维尔)测量了针对刺突蛋白受体结合域的抗体滴度。先前的研究已经证明了这种测量的有效性,因为用该设备测量的抗体滴度与

开发具有新型刚度检测和阻抗控制
摘要:触觉手和握手,旨在实现熟练的对象操纵,对于与环境的高精度互动至关重要。这些技术在诸如微创手术等领域尤其重要,它们可以增强手术精度和触觉反馈:在高级假肢的发展中,为用户提供了改善功能和更自然的触觉,并且在工业自动化和制造业内,它们为更有效,安全和灵活的生产过程贡献了更有效,安全和灵活的生产过程。本文介绍了两指机器人手的开发,该手的开发采用了简单而精确的策略来操纵物体而不会损害或丢弃它们。我们的创新方法融合了对力敏感的电阻器(FSR)传感器,其平均电流是伺服电机的平均电流,以提高抓握的速度和准确性。因此,我们旨在创建一种比抓手更灵巧的抓握机制,而不是机器人手。为了实现这一目标,我们设计了一只两指机器人手,每只手指上都有两个自由度。将FSR集成到每个指尖中,以实现对象分类和初始接触的检测。随后,连续监测伺服电流以实现阻抗控制并保持对物体的掌握在各种刚度中。在初始接触时提出的手部对象的刚度分类,并通过融合FSR和运动电流来施加准确的力。使用耶鲁-CMU – Berkeley(YCB)对象进行了实验测试,包括一个泡沫球,一个空的苏打罐,苹果,苹果,玻璃杯,塑料杯和一个小牛奶包装。机器人的手成功地从桌子上捡起了这些物体,并将它们坐下而不会造成任何损坏或中途丢弃。我们的结果代表着具有先进物体感知和操纵能力的触觉机器人手的重要一步。