XiaoMi-AI文件搜索系统
World File Search System掌握
掌握研究方法和数据分析
工程和物理科学,可爱的专业大学。她已经从昌迪加尔(Chandigarh)获得了Acsir Csir-Csio的博士学位,并获得了帕特拉(Patiala)旁遮普大学(Patiala)的金牌。她的研究兴趣是光谱,化学计量学,统计分析,定性和定量分析,天文学和空间物理学。她是2013年CSIR-SRF奖学金奖,还获得了印度工程师学会的AMIE研究生奖2021年,并获得了魔术书2023年的“最佳成就奖”。她有50多篇研究论文,一本书和一本专利,并获得了8个博士学位和7个硕士学生的学生,并在天文学和食品的定性分析领域。目前在定性和定量分析食品和饮料领域使用近红外光谱和化学计量学的定量分析。她是A.M.I.E.,IEI(印度)和印度科学狂热协会的终身成员的副成员。

生态系统掌握的陆战官 - 平衡和...
海洋掠食者在维持海洋生态系统的健康和稳定性方面起着重要作用。它们对于规范猎物人群,塑造社区结构以及为海洋环境的整体生物多样性做出贡献至关重要。了解海洋掠食者的作用对于理解海洋生态系统以及人类引起的变化的含义,例如过度捕获和气候变化很重要。海洋捕食者,例如鲨鱼,大鱼和海洋哺乳动物,通过捕食来调节其猎物的种群。此控制可防止任何单一物种过分主导,这可能导致生态系统失衡。例如,像鲨鱼这样的顶点捕食者将中级捕食者的种群控制在检查中,这反过来又调节了较小的鱼类和无脊椎动物的丰富性。这种营养的级联效应确保了海洋社区的稳定性和多样性。

掌握成语、短语动词、搭配和俚语
如果你开始重复自己的话,实际上会伤害到你。不要重复自己的话,但要用话语标记将你说的话有条理地联系起来:正如我之前提到的,首先,之后,最后等等。能够解释和总结事情对考试来说非常重要。力求在提供一些细节和

掌握 FOM - 空中客车 A320 系统测验
复飞期间,飞行员没有将飞机旋转到足够高的俯仰姿势。空速迅速增加到空速指示器上的襟翼超速警告条内,以红黑色“理发店柱”表示,并且触发了视觉和听觉主警告。飞行员没有向上俯仰以降低速度,而是向下俯仰,这进一步增加了速度。另一名飞行员不得不进行干预,将飞机向上俯仰,以将速度降至襟翼限制以下并取消警告。在会后的讨论中,飞行员解释说他被主警告声和闪光灯弄糊涂了。当指示空速快要达到从仪表顶部垂下的显眼的红黑色襟翼超速带时,他本能地向下推以远离警告带,忘记了他的基本飞行技能:这只会增加速度。
数据驱动的企业:数据掌握的路径
他们的非技术基础(文化,道德护栏,治理机制以及法律和监管框架)。超过一半(56%)认为自己在技术基础(数据,技术,基础架构和技术技能)上成熟。我们还研究了生成AI的兴起及其对数据操作的影响。我们发现,有60%的组织已经实施了基于企业数据的生成AI计划的早期概念证明(POC)。但是,有75%的数据主管将生成AI POC的大规模部署是一个重大挑战。例如,只有42%的数据主管具有训练生成AI模型的所需数据。与2020年相比,随着数据驱动的企业,随着数据驱动的企业的比例,随着数据驱动的企业的比例,随着数据驱动的企业的广度,数据驱动的企业的规模增加了。

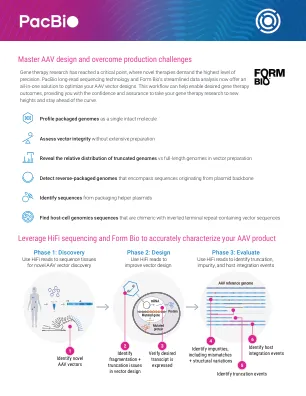
掌握 AAV 设计并克服生产挑战
仅供研究使用。不可用于诊断程序。© 2023 Pacific Biosciences of California, Inc.(“PacBio”)。保留所有权利。本文件中的信息如有更改,恕不另行通知。PacBio 对本文件中的任何错误或遗漏不承担任何责任。某些通知、条款、条件和/或使用限制可能与您使用 PacBio 产品和/或第三方产品有关。请参阅适用的 PacBio 销售条款和条件以及 pacb.com/license 上的适用许可条款。Pacific Biosciences、PacBio 徽标、PacBio、Circulomics、Omniome、SMRT、SMRTbell、Iso-Seq、Sequel、Nanobind、SBB、Revio 和 Onso 是 PacBio 的商标。
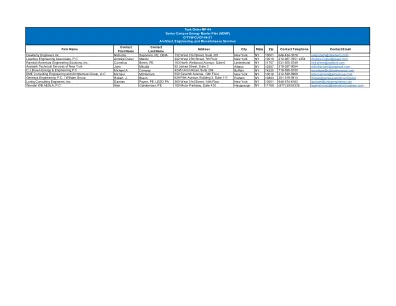
MP-04-元素校园 - 能量掌握-plan.pdf
Dewberry Engineers Inc. Nicholas Saponara,PE,DBIA 132 West 31st Street,Suite 301 New York NY 10001 646-434-3378 nsaponara@dewberry.com Lizardos.com Lizardos Engineerering Associates,P.C。Andrew Dubel Malicki 222 West 37th Street, 7th Floor New York NY 10018 212-967-7651 x354 Andrew.Dubel@leapc.com Ramboll Americas Engineering Solutions, Inc. Cornelius Breen, PE 163 North Wellwood Avenue, Suite 6 Lindenhurst NY 11757 631-505-0749 neil.breen@ramboll.com纽约的Aramark技术服务John Mikulitz 52 James Street,Suite 3 Albany NY 12207 12207 518-527-9054 Mikullitz-john@aramark.c.j.brown c.j.Brown Energy&Engineering,Brown Energy&Engineering mcOnway@cjbrownenergy.com EME咨询工程与建筑集团,有限责任公司Michael McNamara 550 Seventh Avenue,纽约10楼NY 10018 212-529-5969 mmcnamara@emegroup.com Genesys.com Genesys Engineering,P.C。/ Willdan Group Robert, J. Braun 629 Fifth Avenue, Building 3, Suite 111 Pelham NY 10803 201-519-0813 rbraun@genesysengineering.net Loring Consulting Engineers, Inc. Damian Payne, PE, LEED PA 360 West 31st Street, 14th Floor New York NY 10001 646-674-6183 dpayne@loringengineers.com Wendel WB Aesla,P.C Alan Giantomaso,PE 100 Motor Parkway,Suite 410 Hauppauge NY 11788(877)293.6335 Agiantomaso@wendelcompanies.com
屏蔽数据王国:掌握计算机的艺术...
在一个时代,信息占据了至高无上的“屏蔽数据王国:掌握计算机安全的艺术”是浏览复杂数字保护景观的重要指南。这本综合书籍研究了保护敏感数据免受网络威胁所必需的基本原理和高级技术。将理论见解和实际应用结合在一起,涵盖了各种各样的主题,包括加密,网络安全,威胁检测和事件响应。无论您是IT专业人员,网络安全爱好者,还是只是希望增强知识的人,这本书都是您掌握计算机安全艺术的确定资源。

孩子们可以通过这个便携式游戏站来掌握数学知识。
注意:本设备已经过测试,符合 FCC 规则第 15 部分对 B 类数字设备的限制。这些限制旨在为住宅安装提供合理的保护,防止有害干扰。本设备会产生、使用并辐射射频能量,如果不按照说明进行安装和使用,可能会对无线电通信造成有害干扰。但是,不能保证在特定安装中不会发生干扰。如果本设备确实对无线电或电视接收造成有害干扰(可通过关闭和打开设备来确定),建议用户尝试通过以下一种或多种措施来纠正干扰:•重新调整或重新放置接收天线。•将设备连接到与接收器不同的插座。•增加设备和接收器之间的距离。•咨询经销商或经验丰富的无线电/电视技术人员寻求帮助。注意:用户应注意,未经制造商批准对设备进行的更改和修改可能会导致用户无权操作本设备。