XiaoMi-AI文件搜索系统
World File Search System控制信号

增强基于运动意象的脑机接口用于中风康复
在全球范围内,中风幸存者的残疾率超过 80%,其中上肢运动障碍影响了 85% 以上的个人。为了应对这一挑战,基于运动想象 (MI) 的脑机接口 (BCI) 已成为一种有前途的方法,可将个人想象的运动意图转化为外部设备的控制信号。脑电图 (EEG) 信号因其非侵入性、便携性、高时间分辨率和价格实惠而常用于 MI-BCI。本研究利用了公开可用的脑电图运动/图像数据集 (EEGMMIDB),包括来自 109 名参与者的 64 通道 EEG 记录,采样率为 160 Hz。目的是直接使用长短期记忆 (LSTM) 网络在清理后的 EEG 信号上对手掌和脚的张开/闭合进行分类,从而绕过计算密集且耗时的传统特征提取方法。通过调整与时期和段长度相关的超参数,我们实现了 71.2% 的平均分类准确率。这项研究强调了深度学习方法在生成稳健的控制信号以使用 EEG 信号预测运动意图方面的有效性,从而无需使用费力的特征提取方法。通过利用深度学习模型,MI-BCI 设备可以促进神经康复,尤其是中风患者的神经康复,通过提供运动辅助,使患者能够仅通过想象力来执行动作。

增强基于运动意象的脑机接口用于中风康复
在全球范围内,中风幸存者的残疾率超过 80%,其中上肢运动障碍影响了 85% 以上的个人。为了应对这一挑战,基于运动想象 (MI) 的脑机接口 (BCI) 已成为一种有前途的方法,可将个人想象的运动意图转化为外部设备的控制信号。脑电图 (EEG) 信号因其非侵入性、便携性、高时间分辨率和价格实惠而常用于 MI-BCI。本研究利用了公开可用的脑电图运动/图像数据集 (EEGMMIDB),包括来自 109 名参与者的 64 通道 EEG 记录,采样率为 160 Hz。目的是直接使用长短期记忆 (LSTM) 网络在清理后的 EEG 信号上对手掌和脚的张开/闭合进行分类,从而绕过计算密集且耗时的传统特征提取方法。通过调整与时期和段长度相关的超参数,我们实现了 71.2% 的平均分类准确率。这项研究强调了深度学习方法在生成稳健的控制信号以使用 EEG 信号预测运动意图方面的有效性,从而无需使用费力的特征提取方法。通过利用深度学习模型,MI-BCI 设备可以促进神经康复,尤其是中风患者的神经康复,通过提供运动辅助,使患者能够仅通过想象力来执行动作。

阀门定位器及附件 - Rotork YTC
阀门定位器通常安装在线性控制阀的气动执行器的轭或上壳体上,或安装在旋转控制阀的轴端附近。为了能够将阀门的位置与控制器请求的位置进行比较,定位器可以机械地连接到阀杆或阀轴上,或者通过非接触式传感技术检测运动。当控制信号与阀门执行器的位置不同时,阀门定位器会改变先导压力以移动执行器,直到达到正确位置。

CIE IGCSE 计算机科学复习笔记 2023
控制单元控制 CPU 周围的数据流。控制单元还向不同组件发送控制信号,指示它们执行哪些操作,例如读取、写入、添加、减去。控制单元解码指令(转换为操作码和操作数)。控制单元控制操作的时间(时钟速度)。算术逻辑单元 (ALU) 执行执行指令所需的计算,包括加法和减法。ALU 还执行逻辑运算,如比较。ALU 有一个内置寄存器,用于存储计算的临时结果

引文:RK Mishra、AK Mishra,(2023 年)。太空太阳能发电:基于微波的无线电力系统的可行性。《海洋科学杂志》
这被提供给振荡器馈电磁控管。磁控管的微波功率输出被引导到抛物面反射器天线阵列中,以便传输到接收端天线。为了补偿自由空间中的大量损失,空间传播和接收端的信号强度以及转换效率。天线以阵列形式连接,基于 FM 运行的信号无线电控制反馈系统为磁控管提供适当的控制信号,使其输出电平随着接收端的消费者需求而波动。通过使用高转换效率的直流到交流投资者和更高额定值的 Scotty 二极管来增加天线阵列的方向性,可以提高 WPT 系统的整体效率。
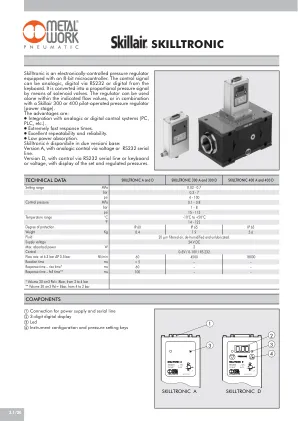
斯凯尔特罗尼克
Skilltronic 是一款配备 8 位微控制器的电子控制压力调节器。控制信号可以是模拟信号、通过 RS232 的数字信号或来自键盘的数字信号。它通过电磁阀转换为比例压力信号。调节器可以在指示的流量值内单独使用,也可以与 Skillair 300 或 400 先导式压力调节器(功率级)结合使用。优点是:● 与模拟或数字控制系统(PC、PLC 等)集成。● 响应时间极快。● 出色的重复性和可靠性。● 低功率消耗。Skilltronic 有两种基本版本:版本 A,通过电压或 RS232 串行线进行模拟控制。版本 D,通过 RS232 串行线或键盘或电压进行控制,显示设定压力和调节压力。


机器人手臂可以由大脑控制吗?
我们将四个微电极阵列植入了研究参与者的大脑中。微电极阵列是一种包含记录和引起神经信号的传感器的设备。神经信号是人体用来与大脑传达信息的信息。我们将两个阵列放在大脑区域,以控制手和手臂运动。这些阵列记录大脑活动以解码机器人臂的控制信号。,我们将其他两个阵列放在大脑区域,通常在触摸手时接收和解释信息。使用微小的电脉冲,这些感觉阵列会产生神经信号,这些神经信号提供有关机器人手何时与物体接触的信息。

目录 2022.cdr
C-Bus 用于控制家庭自动化系统以及商业建筑照明控制系统。与使用施加在交流电源线上的信号的更常见的 X10 协议不同,C-Bus 使用专用低压电缆或双向无线网络来传输命令和控制信号。这提高了命令传输的可靠性,使 C-Bus 比 X10 更适合大型商业应用。C-Bus 系统可用于自动或通过远程控制来控制照明和其他电气系统和产品,还可以连接到家庭安全系统、AV 产品或其他电气设备。C-Bus 系统有有线版和无线版,并配有网关,允许在有线和无线网络之间发送消息。

nguyen dang quang huy1,tran phuong yen1,do duc ...
摘要。在本文中,我们提出了由高索引液体渗入的四个中心核的光子晶体纤维的设计,以高效地控制光引导。我们分析了纤维基本模式的现场分布,有效模式区域和分散特征。在耦合模式理论中,纤维中的脉冲传播受耦合的非线性schrödinger方程的控制。我们使用拆分步骤傅立叶方法来模拟脉冲的传播数值。结果显示了动力学的三个特征:振荡,切换和自我捕获。我们预测,纤维可以通过引入合适的输入和控制信号作为逻辑门设备运行。关键字:耦合的非线性Schrodinger方程,逻辑门,光子晶体纤维,分裂式傅立叶算法。