XiaoMi-AI文件搜索系统
World File Search System控制信号
PlexBright® 光遗传学刺激系统指南
PlexBright LD-1 单通道 LED 驱动器是一种经济实惠的解决方案,用于控制一个 LED(或两个具有相同输出模式的 LED)。该设备配备手动拨盘和 LCD 显示屏,用于设置光输出强度,并可以接受编码脉冲输出模式的数字 (TTL) 输入信号。LD-1 LED 驱动器还接受编码任意输出模式的 0-5V 模拟输入信号。LD-1 单通道 LED 驱动器可以作为独立设备运行,向 LED 模块提供恒定的控制信号。但需要注意的是,此驱动器不会生成脉冲或任意模式。相反,它从单独的设备(以 TTL 或模拟信号的形式)接收这些模式作为输入,并生成驱动 LED 模块所需的相应输出。请参阅下表了解更多详细信息和技术规格。
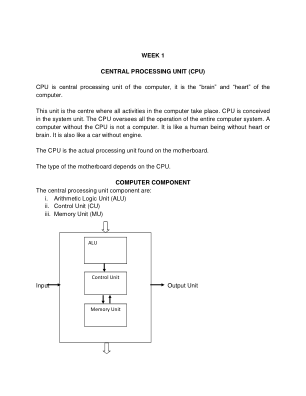
第 1 周 中央处理单元 (CPU) ...
算术逻辑单元也称为整数单元 (IU)。控制单元 (CU) 处理所有处理器控制信号。它指挥所有输入和输出流,从微程序中获取指令代码,并通过提供控制和时序信号指挥其他单元和模型。CU 组件被视为处理器的大脑,因为它向几乎所有事物发出命令并确保正确执行指令。CU 从指令和状态寄存器获取输入。其操作规则或微程序编码在可编程逻辑阵列 (PLA)、随机逻辑或只读存储器 (ROM) 中。控制单元是 CPU 的重要组成部分。它充当计算机的主管。它控制和协调计算机系统的所有活动。它还维护计算机系统中流量和数据流的顺序。计算机内存是存储数据、程序和信息的存储位置。

tinylidarnet:基于第2 f1th自主赛车的端到端深度学习模型
摘要 - 先前的研究证明了端到端深度学习对机器人导航的有效性,其中控制信号直接源自原始感觉数据。但是,大多数现有的端到端导航解决方案主要基于相机。在本文中,我们介绍了Tinylidarnet,这是一种基于自动赛车的基于轻量级的2D激光雷达的端到端深度学习模型。使用Tinylidarnet的第1辆汽车在第12场比赛中获得第三名,这表明了其竞争性能。我们会系统地分析其在未经训练的轨道和实时处理的计算要求上的性能。我们发现,基于Tinylidarnet的1D卷积Neu-ral网络(CNN)的体系结构显着胜过基于多层的多层感知器(MLP)体系结构。此外,我们表明它可以在低端微控制器单元(MCUS)上实时处理。

PowerPoint 演示文稿
所提出的发明是一种全数字共振搜索、跟踪和停留 (RSTD) 测试方法,其中非线性霍普夫振荡器产生连续正弦波信号。反馈产生的激励频率及其幅度用作振荡器的输入。霍普夫振荡器的主要优点是: 整个过程都是数字化的; 试件在其共振时由激励器激励,该激励器由频率和幅度变化的振荡信号驱动; 通过测量激励基准和试件响应(位置、速度或加速度)之间的相位滞后,激励频率跟踪试件的共振频率; 试件的振动幅度也受到控制; 振荡控制信号由一个自动平滑控制策略施加的频率和幅度变化的过程生成。

AI对学生生活的影响
在我们现代时代,机器人技术是一个总是在变化的领域。机器人是一种机械机器,可以在人类的指导和控制下进行手动劳动。已经开发了许多机器人,以进行人们无法直接完成的危险活动。本研究提出了一种用于使用计算机视觉的人类机器人相互作用的机器人手势系统。MediaPipe用于通过实时的手动跟踪和具有里程碑意义的检测来识别静态手势。公认的手势被转化为控制信号,并发送到配备伺服电机的Arduino控制机器人手。结果证明了该系统在辅助机器人技术,远程操作和教育中的应用潜力,未来的工作着重于动态手势和增强实时性能。
基于PWM的轻载高效单芯片DC-DC降压变换器设计
PWM是最早提出的控制方法,通过比较参考电压与反馈电压来调整控制信号的占空比,调节DC-DC变换器的输出,达到自动调节的效果,具有输出电压恒定、开关噪声可预测、容易滤波等优点,但由于开关管频率固定、功耗恒定,在轻载时转换效率较差。PFM的引入,利用调整控制信号解决了PWM的轻载问题。频率调制技术减少了转换过程中的开关负载,不需要复杂的变换器结构,因此不需要控制环路补偿网络,但频率变化引起的响应速度慢、输出电压纹波大,会产生难以控制的电磁干扰。两种方法都有各自的特点和问题(Yu,2003)。

引用:Sikandar Qammar、Ayimen Khalid Khan 博士 (2022) BCI 系统和各种信号采集技术的比较。J Data Sci Mod Tech 6: 1
脑机接口 (BCI) 是一个基于神经科学、信号处理、生物医学传感器、硬件等的先进、跨学科且活跃的研究领域。它是一种通信系统,允许人类使用脑电波活动产生的控制信号与周围环境进行通信,而无需外周神经或肌肉的参与。在过去的几十年里,已经开展了几项开创性的研究,探讨了不同信号采集技术对 BCI 的适用性。然而,尚未进行全面涵盖这一领域的综合综述。因此,本研究提供了全面的概述,包括对用于捕获 BCI 信号的不同技术的比较,并简要描述了每种技术的优缺点。本文还介绍了可用于从大脑采集 EEG 信号以使用 EEG 的最佳位置

EEG和FNIRS的早期融合改善了运动图像的分类
大脑 - 计算机界面(BCIS)是通信系统,它利用大脑产生的控制信号与周围环境相互作用,而无需参与周围神经系统和肌肉(Nicolas-Alonso和Gomez-Gil,2012年)。这些年来,在BCI领域取得了繁荣的进步。运动图像(MI)是BCI研究中的常见范例之一(Kaiser等,2011),它是通过想象执行给定任务(Jeannerod,1995)来完成的,例如Grabing(Herath and Mel,Mel,2021),Lifting(Kasemsumsumsumsumsumsumsumran and Boonchieng,2019年),以及。mi-bcis被广泛用于帮助由中风引起的运动功能障碍的患者(Ang等,2010),肌萎缩性的侧面硬化症(Lulé等,2007),脊髓损伤(Cramer等,2007),因此,进行日常生活援助或康复训练。由于运动图像任务诱导事件相关的对同步和同步(ERD/ERS)

由 stsmc 引导和控制的垂直起降飞机
本文介绍了在非参数不确定性(阵风和风扰动)下悬停飞行的垂直起降 (VTOL) 无人机 (UAV) 的滚转运动的最佳滑模控制 (SMC) 和最佳超扭转滑模控制 (STSMC) 的设计。本文对受控滚转运动进行了稳定性分析,并基于 Lyapunov 定理证明了渐近误差收敛。据此,针对受不确定性影响的飞机系统制定了控制律。为了避免在选择设计参数时进行反复试验并提高 SMC 和 STSMC 的性能,建议使用灰狼优化进行调整。基于数值模拟,对最佳和非最佳控制器以及最佳 SMSTC 和最佳 SMC 进行了比较研究,比较了跟踪误差和控制信号中的抖动行为。数值模拟表明,GWO 可以提高 SMC 和 STSMC 的性能。此外,在跟踪误差和控制信号抖动效应方面,最佳 STSMC 比最佳 SMC 具有更好的动态性能。

使用...实现变压器的自动负载分配
该项目的目的是在过载情况下自动分配变压器的负载,保护变压器免受损坏并提供不间断电源。由于过载,电流过大,绕组过热,可能烧毁,因此效率会下降。因此,通过微控制器并联另一个相同额定值的变压器,通过分配负载来保护变压器。微控制器将第一个变压器上的负载与参考值进行比较。当负载超过参考值时,第二个变压器将共享额外的负载。因此,两个变压器高效工作并防止损坏。在这个项目中,三个模块用于控制负载电流。第一个模块是传感单元,用于感测负载电流,第二个模块是控制单元。最后一个模块是微控制器单元,它将读取来自传感器模块的模拟信号并执行一些计算,最后向继电器发出控制信号。该项目的优点是保护变压器、不间断电源、短路保护和维护目的。