XiaoMi-AI文件搜索系统
World File Search System控制能力

声音和蓝牙控制的机器人车
1。引言在机器人技术领域,尖端技术的融合为重新定义自动系统功能的创新解决方案铺平了道路。该项目标志着这一轨迹的重大大步,引入了以双重控制范式语音和蓝牙为特色的智能机器人车辆。机器人车辆将接受用户语音命令并执行给定的用户任务,而没有人类的存在,可以通过用户语音输入来控制机器人。机器人可以通过用户语音输入操作。它需要一个Android应用来通过蓝牙HC-05模块进行通信。然后,机器人车辆可以借助超声传感器模块感知对象。对于硬件,自定义的Arduino将控制用于运行机器人车辆的电机。超声传感器与Arduino在突然障碍物检测中自动制动车辆的帮助。避免机器人目前在人类无法进入的危险区域中使用。它可以很容易地识别声音。在此设计中,使用微控制器的Android应用程序用于所需的任务。用蓝牙技术促进了应用程序和机器人之间的连接。这项工作的核心目标是创建一种机器人车辆,能够通过与用户无缝互动来执行用户定义的任务。由专用的Android应用程序促进的语音控制集成使用户可以直观地与机器人工具进行通信。同时由HC-05模块启用的蓝牙连接提供了额外的控制层,增强用户可访问性并扩展了车辆的操作范围。此中央控制单元可以解释语音命令和蓝牙输入,从而授权机器人车辆自治,以有效地浏览其环境。补充这些控制功能是超声波传感器模块,可确保实时障碍物检测并促进自动制动以提高安全性。在机器人技术中,为智能机器人车提供了语音和蓝牙控制的无缝集成。其双控制能力,再加上避免障碍物,为自主系统设定了新标准。因此,无缝特征诸如障碍物控制和声音以及机器人的蓝牙控制能力。

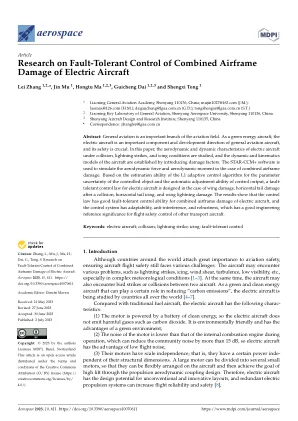
电动飞机机体组合损伤容错控制研究
摘要:通用航空是航空领域的重要分支,电动飞机作为绿色能源飞机是通用航空飞机的重要组成部分和发展方向,其安全性至关重要。本文研究了电动飞机在碰撞、雷击、结冰等工况下的气动与动力学特性,引入损伤因素,建立飞机动力学与运动学模型。利用STAR-CCM+软件模拟机体组合损伤情况下的气动力和气动力矩。基于L1自适应控制算法对被控对象参数不确定性的估计能力和控制输出的自动调节能力,设计了在机翼损伤、碰撞后平尾损伤、平尾结冰、机翼雷击损伤情况下的电动飞机容错控制律。结果表明,该控制律对电动飞机机体组合损伤具有良好的容错控制能力,控制系统具有适应性、抗干扰性和鲁棒性,对其他运输飞机的飞行安全控制具有很好的工程借鉴意义。
欧洲委员会布鲁塞尔,5.2.2025 com(2025)37 ...
这种沟通概述了委员会在整个生命周期中的电子商务进口所面临的挑战的全面方法。委员会宣布其执行优先事项,呼吁加强所有相关当局之间的合作和协调。这种合作应确保通过电子商务直接遵守欧盟规则和公平交易惯例的进口产品。为了实现这一目标,委员会呼吁成员国及其主管当局在监视和实施本沟通中概述的关键动作方面发挥积极作用。此外,委员会还规定了使海关和市场监视当局更具弹性和有效性的措施,特别是通过对海关联盟改革的高级实施,因为这既可以消除低价值货币的税款,又可以增强控制能力,以及通过可能直接交付给消费者的进口货物的可能的非歧视性处理费用。委员会邀请市场和机构利益相关者在这项工作中进行合作。

基于皮层脑电图的大脑研究现状...
或功能受限的患者,使用脑信号控制辅助医疗设备的能力将极大地改善生活质量。例如,患有肌萎缩侧索硬化症 (ALS) 或四肢瘫痪的患者在交流和运动控制方面有严重的障碍。对于 ALS 患者,眼动追踪可以为这些人提供控制设备的选择,但这项技术依赖于光照条件和完全眼球活动,而这在 ALS 晚期可能会受到限制。1 最近两项基于皮层脑电图 (ECoG) 的脑机接口 (BCI)(记录、放大和转换成外部设备计算机命令的系统)的研究为这些患者通过恢复交流或运动控制能力来改善对身体限制的自我管理带来了希望。2,3 在这篇综述中,我们主要关注两种功能障碍和发病率高的疾病——ALS 和四肢瘫痪,BCI 技术在这两种疾病中得到了最广泛的应用。
用于... 的滑翔自转旋翼机的模拟和控制设计
精确空投是一种技术,其所需能力变得更加精确,因为战斗情况需要更高的精确度。弹道和翼伞型运载工具没有能力在城市战斗情况下持续向特定屋顶投送有效载荷。滑翔自转旋翼机运载平台已被研究作为实现更高空投性能的手段。自转旋翼机具有与翼伞相似的滑翔特性,但具有更好的抗风能力和控制能力。已经构建了基于动量和叶片元素直升机理论的初步模拟。已经开发了一种使用多环闭合策略的经典控制器,该控制器使用新的非线性制导律来遵循由考虑初始条件的算法生成的路径。扩展卡尔曼滤波器用于状态估计。模拟结果显示一致的精度约为 5 英尺,最终位置误差很少超过 10 英尺。
第四纪抽水蓄能水电对可再生能源渗透率较高的美国西部互联电网频率响应的影响:预印本
摘要 — 随着美国可再生能源渗透率的提高,通过提供足够的频率控制能力来维持低惯性电网的稳定性和可靠性成为一项挑战。先进的抽水蓄能技术 (APSH) 不仅作为能源供应商,而且作为辅助服务提供商,有望在未来电网中发挥重要作用。本文研究了使用四元抽水蓄能水电 (Q-PSH) 作为新提出的 APSH 技术之一来提供一次频率响应的影响。为了量化 Q-PSH 对美国西部互联频率响应的影响,在 GE 正序负荷流 (PSLF) 平台上开发了一个用户定义的 Q-PSH 动态模型,并在一系列详细的美国西部电力协调委员会 (WECC) 规划案例中实施,其中可再生能源渗透率分别为 20%、40%、60% 和 80%。仿真结果表明,与传统 PSH 相比,Q-PSH 有助于改善频率最低点和稳定频率。

高光伏渗透率对电压稳定性的影响
摘要 — 光伏 (PV) 在现代电力系统中的重要性日益凸显。随着光伏发电的发展,可靠性问题也随之而来,因为光伏发电的行为与传统发电机不同。其中一个可靠性问题是电压稳定性。本文使用具有不同光伏渗透水平的动态模型,研究了德克萨斯州电力可靠性委员会 (ERCOT) 系统中奥斯汀地区的电压稳定性。基准情况设定为可再生能源渗透率为 0%。其他情况包括 15% 的风能渗透率和高达 65% 的光伏渗透率。研究结果表明,电压/无功控制能力对电压稳定性至关重要,而光伏发电缺乏这种能力。光伏的电压调节可能会导致过压,并且在区域光伏渗透率高的情况下,电压崩溃可能会更加突然。
危险能量的控制(锁定/标记)
A.受影响的员工 - 一名员工要求他/她在锁定和/或标记下进行维修或维护的机器或设备,或者要求他/她的工作在执行此类服务或维护的领域工作。B.授权员工 - 在机器或设备上锁定或实施标记系统程序以执行维修的人;或该机器或设备上的维护。当受影响员工的职责还包括在必须锁定的机器或设备上执行维护或服务时,授权员工和受影响的员工可能是同一个人。C.能够被锁定的能力 - 如果具有HASP或其他固定方式,可以将锁定的设备锁定在该设备上,或者可以通过该手段固定锁,或者它具有内置的锁定机构。其他能源隔离设备也能够被锁定,如果无需拆除,重建或替换能量隔离设备或永久改变其能量控制能力而无需锁定。D.脱氧化 - 从机械和设备中卸下电压和所有其他能源。

Microsoft Word - 04-老年人站立测试中的腿部肌肉活动和相似性指数
目的:双腿、串联和左右单腿站立(DLS、TS、L-SLS 和 R-SLS)的总时间通常用于评估老年人的稳定性。为了提供老年人运动控制能力的详细信息,肌肉活动数据至关重要。背景:几种站立测试已用于评估老年人未来跌倒的可能性。将肌肉活动数据与站立测试一起纳入稳定性分析,将提供更可靠的姿势稳定性定量指标。方法:我们收集了 22 名老年参与者(70.3±4.2 岁)每条腿六块肌肉的表面肌电图 (sEMG) 数据,并使用大脑运动控制评估 (BMCA) 协议对其进行评估,重点关注幅度和相似性指数 (SI)。15 名能够保持站立至少 10 秒或更长时间的参与者组成对照组,而 7 名保持站立时间少于 10 秒的参与者被分为测试组。结果:对于右侧单腿站立 (R-SLS),对照组显示为 28.1(±3.5) 秒,而测试组平均为 8.9(±4.6) 秒。对照组所有站立姿势的总平均 EMG 幅度为 120.0(±45.6) uV,而测试组为 131.6(±75.5) uV (p > 0.56)。对照组的 SI 为 0.94(±0.04),测试组为 0.84(±0.15) (p < 0.02)。右侧和左侧之间没有发现显著差异。值得注意的是,两名测试组参与者在所有站立姿势下的 SI 值都很低(平均 SI = 0.69±0.16 和 0.60±0.12)。结论:我们应用 BMCA 协议来分析健康老年人在站立测试期间的 sEMG 模式。相似性指数有望成为一种有效的筛查工具,用于识别存在稳定性问题的人。此外,BMCA 协议可用于在各种稳定性测试中监测老年人的运动控制能力。应用:本研究使用 BMCA 协议评估这些姿势下的 sEMG,表明 SI 和维持时间可能是识别平衡困难的老年人的有效筛查工具。关键词:肌电图、单腿姿势、相似性指数、脑运动控制评估 (BMCA)、筛查工具