XiaoMi-AI文件搜索系统
World File Search System摩擦力

空间应用的各种材料和表面处理的环境和氮气环境摩擦数据
摘要 为了设计在极端条件下(包括长期太空任务)可靠运行的运动机械部件,需要对候选材料、表面处理和干膜润滑剂进行多元摩擦学评估。在本研究中,使用球对平试验收集了线性往复或单向滑动摩擦数据。球是硬化的 440C 不锈钢(未涂层或溅射 MoS 2),平面是 440C 不锈钢、Nitronic 60 不锈钢或 Ti6Al4V 钛合金,并经过各种表面处理和/或干膜润滑剂。表面处理包括阳极氧化、氮化和电火花加工。干膜润滑剂包括 Microseal 200-1、溅射 MoS 2 和纳米复合涂层 i-Kote。数据包含测试期间施加的法向载荷、测得的摩擦力、计算的摩擦系数、球位置、环境温度和相对湿度。测试在 300 至 2000 MPa 的不同峰值赫兹接触压力条件下进行。表面处理和干膜涂层后在 150 °C 下真空烘烤的平面以及在惰性气体(氮气)环境中测试的样品的数据也可用。这些数据既可用于从根本上了解不同材料系统的摩擦学特性,也可用于设计适合特定应用、条件和工作周期的组件。

创新:简单机器简介
简单机械让我们能够推动或拉动更远的距离,从而使我们的工作更轻松。“简单机械是一种无动力机械装置,可以改变力的方向或大小。一般来说,它们可以定义为利用机械优势(也称为杠杆作用)来增加力的最简单的机制。简单机械使用单一施加力来对抗单一负载力。忽略摩擦损失,对负载所做的功等于施加力所做的功。机器可以增加输出力的大小,但代价是负载移动的距离成比例减少。输出与施加力之比称为机械效益。”* *维基百科 — “简单机器” — 2014 年 7 月 7 日访问 词汇 • 滑轮 — 改变力的方向 • 杠杆 — 增加或减少施加的力 • 轮轴 — 减少移动物体的摩擦力 • 螺丝 — 将物体固定在一起或移动物体 • 斜面 — 减少移动物体的力 • 楔子 — 用于将两个物体推开或将物体切成碎片。它还可以将物体固定到位。 • 齿轮(有时被认为是一种简单机器,有时是一种复杂机器) — 增加力、改变速度或动力源的方向 — 由带有杠杆的轮轴组成 • 工作 — 为生产或完成某事而付出的努力或努力;劳动;辛劳。 预期学生的先入之见/误解

第一届欧洲虚拟断裂会议 柔性石墨作为大型强子对撞机 TDE 块中的束流倾卸材料
大型强子对撞机是欧洲核子研究中心日内瓦设施建造的粒子加速器,其主要目标是研究宇宙知识标准模型中著名的基本粒子的边界。借助 LHC,2012 年对希格斯玻色子等的观测成为可能,随着加速器设计的不断升级,未来几年将描述新的现象。TDE 块构成光束轨迹最后一段的光束倾卸系统,由多个不同密度的石墨块制成。其中,柔性石墨的密度最低(1-1.2 g/cm3)。它与多晶石墨和热解石墨等典型的石墨形式不同,因为在生产过程中不添加粘合剂。由于颗粒粗糙度引起的粘合摩擦力赋予材料典型的柔韧性并有助于变形机制。为了预测材料在梁冲击能量增加时的反应,需要在广泛的温度和应变率范围内深入研究材料行为。在这项初步工作中,在室温下在平面方向上观察了商用柔性石墨(SGL Carbon 的 Sigraflex ®)的静态特性。为了可靠地测量前部和边缘样品表面的应变,采用了两侧 DIC;横梁位移速率在 0.01-10 mm/min 之间变化。最后,讨论了应力应变行为和变形机制。
纤维的比较结构表征...
方法旨在通过实验和有限元分析 (FEA) 研究确定旋转圆盘的纤维增强复合材料的机械行为。首先,对两个不同系列进行 FEA 分析,载荷条件为旋转速度 600 RPM,外部摩擦力 10 N。其中,利用 FEA 工具对七种不同的复合材料样品进行结构特性分析,例如环氧-碳-UD-预浸料-SiC、环氧-碳-UD-湿法-SiC、环氧-碳-编织-预浸料-SiC、环氧-碳-编织-湿法-SiC、环氧-E-玻璃-UD-SiC、环氧-E-玻璃-湿法-SiC 和环氧-S-玻璃-UD-SiC。除这些材料外,还通过 FEA 分析了四种基础材料,以在相同载荷条件下进行比较。其次,进行了实验研究,以调查带有碳化硅 (SiC) 的 FRP 实心盘式制动器转子的适用性,为此,准备了基于碳编织基陶瓷复合材料的 ASTM 标准样品销盘装置。还在两种方法的位移之间执行了验证。最后,这项工作证实了碳纤维陶瓷基复合材料是抵抗旋转动力载荷的良好材料,因此这项工作还强烈建议在制造飞机和汽车盘式制动器等旋转部件时实施 CCMC。
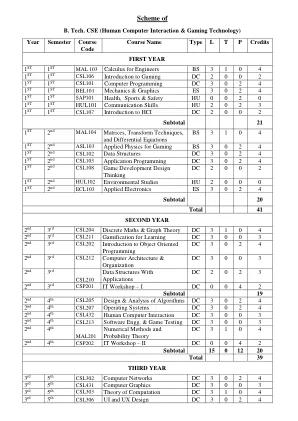
B. Tech. CSE(人机交互与游戏...
课程内容: 模块 1:基本概念 游戏物理 – 游戏引擎(简介)- 物理真实感 – 在游戏中的重要性、物理概念和游戏性能、基础知识 – 坐标系和参考系、标量和矢量、计算矢量大小、矢量叉积、矩阵 – 乘法和旋转、导数。 模块 2:基本牛顿力学和运动学 牛顿三运动定律 – 惯性 – 力 – 质量 – 加速度相等和相反的力、力矢量、力的类型 – 引力 – 摩擦力 – 向心力 – 力平衡和图表、功、能量 – 动能 – 势能 – 守恒 – 功率、平移运动 – 运动方程、旋转运动 - 扭矩 – 角加速度、2D 粒子运动学、3D 粒子运动学、刚体动力学。模块 3:抛射物抛射物属性、简单轨迹和重力、阻力、马格努斯效应 - 抛射物的旋转效应、游戏中的特定抛射物类型 - 炮弹 - 子弹 - 箭、可变质量。模块 4:碰撞:冲量和动量原理 - 线性和角冲量、弹性和非弹性碰撞冲击、恢复系数、碰撞方向和检测、与可移动和不可移动物体的碰撞、与摩擦的碰撞、2D 和 3D 碰撞、游戏应用。模块 5:物理建模:游戏车辆的物理学(飞机、轮船和小船、汽车和气垫船、枪支和爆炸、运动)教科书:1. 游戏程序员的物理学,

汽车工程中的材料科学 提高燃油效率的轻质材料
减轻车辆重量可提高效率,从而影响运输能耗。燃料中 85% 以上的能量会因传动系统的热效率和机械效率低下而损失 1,而剩余的 12-15% 则用于克服阻碍前进运动的牵引力。2 在这些牵引力中,车辆重量对惯性(加速度)和滚动阻力的影响最大,而空气动力与质量关系不大。虽然质量与惯性和摩擦力之间的具体关系已广为人知,但要计算车辆重量减轻对能源效率的确切影响却很复杂,原因包括车队组合、质量分解(即减轻车身等部件的质量可使用重量更轻的系统,如刹车和悬架)以及车辆设计决策。一些研究已经使用实证技术探索了质量与燃料消耗之间的关系。对 2008 年款车型的整备质量与二氧化碳 (CO 2 ) 排放量(与燃油消耗相关的效率衡量指标)进行线性回归分析表明,车辆重量减轻 10% 与 CO 2 排放量减少 8% 相关。3 将整备质量和燃油消耗数据与车辆性能标准化技术相结合的模型表明,车辆重量减轻 10% 图 8.D.1 车辆轻质材料使用趋势8 轿车的燃油消耗减少 5.6%,轻型卡车的燃油消耗减少 6.3%。4 其他研究使用了更复杂(但仍以经验为基础)的模型。一个详细的基于物理的车辆性能模型,该模型是几个

漏坡波和海平面:西边界底部地形和耗散的 Beta 效应异常后果
沿岸陷波 (CTW) 承载着海洋对边界强迫变化的响应,是沿岸海平面和经向翻转环流的重要机制。受西部边界对高纬度和公海变化的响应的启发,我们使用线性正压模型来研究科里奥利参数 (b 效应)、海底地形和海底摩擦的纬度依赖性如何影响西部边界 CTW 和海平面的演变。对于年周期和长周期波,边界响应的特点是改良的架波和一类新的漏坡波,它们沿岸传播,通常比架波慢一个数量级,并向内陆辐射短罗斯贝波。能量不仅沿着斜坡向赤道方向传输,而且还向东传输到内陆,导致能量在当地和近海耗散。 b 效应和摩擦力导致沿赤道方向沿岸衰减的陆架波和斜坡波,从而降低了高纬度变化对低纬度的影响程度,并增加了公海变化对陆架的渗透——较窄的大陆架和较大的摩擦系数会增加这种渗透。该理论与北美东海岸的海平面观测结果进行了比较,定性地再现了沿海海平面相对于公海向南的位移和幅度衰减。这意味着 b 效应、地形和摩擦对于确定沿海海平面变化热点发生的位置非常重要。
基于...的智能微电网稳健电源管理
摘要 — 微电网 (MG) 是一种自主电力系统,可以独立运行或连接到电网。通常的做法是使用单一电网组织来改善能源获取并确保电力的稳定供应。由于微电网 (MG) 缺乏主电网的高摩擦力,并且容易受到较大的电压和频率波动的影响,因此如果处于孤岛状态,微电网 (MG) 可能会不稳定。标准、方向以及可访问性和互操作性标准都涉及微电网的可靠性、分布式本地资源的使用以及网络安全。这项工作提出了一种革命性的智能控制器 Adaptive。本研究提出了一种新型智能控制器,即自适应网络模糊推理系统 - 下垂控制器 (ANFISDC),通过下垂系数修改,提供最佳功率共享,同时最大限度地减少功率过载/削减。为了为孤岛微电网提供必要的稳定性和有利可图的功率共享,下垂系数被改变以考虑 RES(可再生能源)组件的功率波动以及电力生产和需求之间的关系。此外,二次控制用于恢复下垂控制引起的频率/电压下降。在 MATLAB/Simulink 中对负载波动的模拟表明,所提出的策略提高了基于下垂的可再生能源供电微电网的稳定性和经济可行性。模拟结果表明,所建议的 ANFISDC 方法在保持微电网稳定和盈利运行方面效果良好。

静态摩擦对机器人增强学习中SIM2REAL的影响
摘要 - 在机器人增强学习中,SIM2REAL差距仍然是一个关键的挑战。但是,静态摩擦对SIM2REAL的影响尚未得到充实。常规域随机化方法通常从其参数空间中排除静态摩擦。在我们的机器人加强学习任务中,这种常规域随机方法导致了明显不足的现实世界模型。为了应对这一SIM2REAL挑战,我们采用了执行器网作为常规域随机化的替代方案。虽然这种方法能够成功地转移到平面运动,但在楼梯等复杂地形上失败了。为了研究影响机器人关节中SIM2REAL的物理参数,我们开发了一个控制理论关节模型并进行了系统的参数鉴定。我们的分析表明,机器人关节中出乎意料的高摩擦力比率。为了减轻其影响,我们实施了SIM2Real的静态摩擦域随机化。认识到摩擦建模引入的训练难度增加,我们提出了一种简单新颖的解决方案,以降低学习复杂性。为了验证这种方法,我们进行了比较三种方法的综合SIM2SIM和SIM2REAL实验:常规域随机化(无静态摩擦),执行器NET和我们的静态摩擦感知域随机化。所有实验均利用快速运动适应(RMA)算法。结果表明,我们的方法实现了出色的自适应能力和整体性能。
装配和拆除
前言 6 致谢 6 1.0 简介 7 2.0 本技术指南中使用的关键术语和定义 9 2.1 术语和定义 10 2.2 如何在树艺中使用 kN 值 11 3.0 规划索具操作 13 3.1 简介 14 3.2 风险评估 15 3.3 规划 15 3.4 角色和职责 18 3.5 操作员能力 18 3.6 场地布局 20 3.7 树木状况评估 21 4.0 索具技术 25 4.1 简介 26 4.2 索具点在上方 28 4.3 索具点在下方 32 4.4 其他索具方案 36 4.5 辅助拆除技术 40 4.6 预加载线 41 4.7 机械优势 (MA) 42 5.0锚固力 45 5.1 简介 46 5.2 摩擦力 46 5.3 矢量 47 5.4 锚固力随绳索角度变化 47 5.5 重定向 48 6.0 操作员定位 51 6.1 概述 52 6.2 切割技术 53 7.0 系统组件 57 7.1 概述 58 7.2 硬件组件 59 7.3 纺织组件 59 7.4 模块化组件 59 7.5 连接器 59 7.6 组件类型摘要 60