XiaoMi-AI文件搜索系统
World File Search System操作的

AI-7250 此表是关键操作的摘要,
显示项目 内容 初始值 设定值 上位:第 1 显示 下位:第 2 显示 PV SP(目标值) SP 限值下限~上限 0 SP LSP 1(显示示例) LSP 组号 1~LSP 使用的组数(最多 8 个) 1 LSP(第 1 位 = 最右边的位) ST. 1-(显示示例) 步骤运行剩余时间 无法设定 - 步骤号 步骤号表示是上升斜坡、下降斜坡还是保温。 PV MV(操作量) -10.0 至 +110.0% - MV 可在 MANUAL 模式下设定(数字闪烁) HEAt 加热 MV(操作量) 无法设定 - 数字 -10.0 至 +110.0% COOL 冷却 MV(操作量) - 数字 Fb MFB(电机开度反馈值) 无法设定 - 数字t1. --(显示示例) 定时器剩余时间 2 同定时器剩余时间 1 -- 数值 E 1 内部事件 1 主设定 -1999 至 +9999U 或 0 至 9999U 0 数值 E 1. Sb 内部事件 1 子设定 数值 t 1. --(显示示例) 定时器剩余时间 1 无法设定 -- 数值 第 1 显示 表示显示 ON 延迟还是 OFF 延迟 E2 内部事件 2 主设定 同内部事件 1 主设定 0 数值 E2. Sb 内部事件 2 子设定 同内部事件 1 子设定 0 数值 t2. --(显示示例) 定时器剩余时间 2 同定时器剩余时间 1 -- 数值E3 内部事件 3 主设定 同内部事件 1 主设定 0 数值 E3. Sb 内部事件 3 子设定 同内部事件 1 子设定 0 数值 t3. -- (显示示例) 定时器剩余时间 3 同定时器剩余时间 1 - 数值

电动操作的分er的开发...
摘要:早期的农民正在使用传统的农业方法,这些方法耗时且勤奋,因此我们引入了称为拖拉机的新技术,可以用作耕作/耕种土地的耕种者。一般而言,这些机器的成本更高,污染了我们的环境,对印度农民负担不起,因此我们决定以可承受的价格制作紧凑的便携式电动耕种机(Tiller)机器。这台机器的工作是基于电池和电机机构,该机构可以移动切割机或耕作器。而不是开发基于IC发动机的机制,我们宁愿从事电动机制,因为它是清洁的能源,也不污染环境。我们的大多数印度农民都采用生存农业,他们采用了传统的农业方法。这种农业非常勤奋,而且效率不高,因此我们的基本目的是开发小型便携式耕种机器,该机器转向现代农业方法。本报告描述了提议的模型的设计,制造,制造分析。我们的项目旨在实现高安全性,减少人类的努力,提高土壤耕种者的效率,减少工作负荷,减少工人的疲劳并降低维护成本。关键字:电动机,电池,控制器,差速器,分erer

实现单人驾驶操作的技术和……
自航空业诞生以来,驾驶舱操作经历了重大变化。由于航空电子设备和通信技术的改进,客机的发展导致机组人员数量逐渐减少。随着飞行工程师、领航员和无线电操作员被新的玻璃驾驶舱功能所取代,机上人员从 5 人减少到 3 人,然后又减少到 2 人。到目前为止,尽管系统可靠性不断提高,但这一数字尚未减少。事实上,商业航空业最近才开始对单飞行员操作 (SPO) 产生兴趣。目标是评估可以将副驾驶员职责重新分配给可靠和自动化子系统和/或地面支持操作员的强大解决方案。对 SPO 的这种吸引力主要源于现代航空业预计将面临的挑战,包括预计的合格飞行员短缺 51 和不断增加的 27 空中交通(图 1)。考虑到这一点,一些公司正在为向 SPO 过渡做准备,SPO 有可能在长期内节省大量成本 4。事实上,到目前为止,许多专家都同意将这一变化视为一种经济效益。例如,瑞士联合银行 (UBS) 进行的一项研究表明,通过在商用航空中引入 SPO,全球航空公司将在长期内节省 150 亿美元 38 的运营成本。然而,尽管有这些潜在的好处,但关于安全性和人为因素的争论仍在继续,SPO 的技术、操作和商业可行性尚未得到证实。相反,所谓的扩展最低机组运营 (eMCO) 概念正在经历一个不那么麻烦的开发过程,它基于对现有设计的改进,其中 SPO 将仅限于飞行的巡航阶段(例如长途、跨大陆航班)。由于缺乏冗余副驾驶员交叉核对功能,单飞行员操作面临的主要挑战之一将是评估和预测单飞行员的任何高工作负荷情况,以便保持其对任务计划的心理状态并正确处理突然失能事件。此外,由于自动化将接管副驾驶员的一些任务,因此有必要设计一个合适的人机界面 (HMI),以适应操作员的心理状态。其他挑战通常与操作、通信程序和流程以及飞行员/机组人员的培训要求和系统完整性有关。向单飞行员操作的过渡还将需要彻底修改认证范式,考虑到从审议/反应系统向可根据操作条件扩展的混合自主系统的转变。目前,人们正在付出大量努力来评估某些新型飞行辅助系统的运行潜力,这些系统可以作为满足 SPO 提出的新要求的一种手段。学术界和工业界目前正在研究所谓的数字飞行助手 (DFA) 操作概念,以降低驾驶舱的复杂性并在紧张的决策过程中为飞行员提供支持,包括可能导致失能的决策过程。该系统通常旨在执行任务或基于传感器的飞行员认知状态实时评估,以提供特定警报,防止混乱或失去意识。
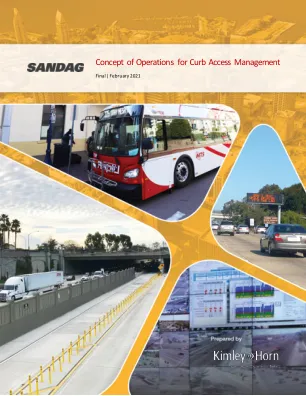
遏制访问管理操作的概念
加州加利福尼亚州运输部CMCP全面的多模式走廊计划CMM能力成熟度模型连接运营概念CVC California California车辆代码FHWA联邦高速公路管理ICMS ICMS ICMS ICMS ICMS INSTEMPRITAT ICMS INTICTARITY ERTRIDER MANDICET SYTENT INTIGNATION INTIGNALTITY运输系统MPH每小时MPH MILS MPH MILS MPO METROPOLITAN MIMPH MIMPH MIMPO走廊NEV邻里电动汽车操作系统RBMS区域边境管理系统RFID无线电频率识别Sandag圣地亚哥政府协会SE System Systems Systems Systems Systerming SFMTA旧金山市政交通运输局SIS SIS SMART SMART INTERSECTIC

来自一般量子操作的量子芝诺动力学
物理学是一门经常基于近似的科学。从高能物理到量子世界,从相对论到热力学,近似不仅能帮助我们解运动方程,还能降低模型复杂性并集中于重要效应。这种近似的最大成功案例之一是有效的动力学生成器(哈密顿量、林德布拉量),它们可以在量子力学和凝聚态物理学中推导出来。用于推导它们的技术的关键要素是分离不同的时间尺度或能量尺度。最近,在量子技术中,人们采取了一种更积极的方法研究凝聚态物理学和量子力学。通过调整系统参数和设备设计可以逆向设计动力学生成器。这使得我们可以创建有效的生成器,用于许多信息论任务,例如绝热量子计算[1]、油藏工程[2]、量子门[3]等等。绝热量子定理[4,5]是此类近似的关键因素。它利用了慢时间尺度和快时间尺度的明确分离,由于其简单性、优美性和有趣的几何解释,吸引了一代又一代的物理学家。绝热量子定理最初的表述与动力学生成器有关。另一方面,在量子技术中,我们经常处理离散动力学,如固定门和量子映射。在连续描述和离散描述之间进行转换并不总是很简单,有时似乎是不可能的。这种困难在非马尔可夫量子信道中表现得更加明显:这些是物理操作[完全正和迹保持(CPTP)映射[6]],没有物理(例如林德布拉)生成器[非马尔可夫量子信道不能通过

机器人技术和操作的实用指南| ...
课程:机器人技术101-机器人技术和操作联系时间的实用指南:24先决条件:科学和技术的基础知识摘要机器人技术和操作中的这一课程提供了对机器人技术的介绍性探索,专注于基本概念,原理,原理和操作机器人的实践技能。在整个课程中,学生将进行理论讨论,有关活动和现实世界的应用程序,以发展对机器人系统的全面理解。目标受众本课程适合于学生,业余爱好者和专业人士,他们希望发展机器人操作的基础知识并获得其运营的技术和实践技能。在完成本课程时的学习成果,学习者将能够:
DNA类型测试操作的指南
此外,必须定期检查DNA类型测试设施,并努力维护以下列出的性能。 a)温度不超过25°C a)湿度不超过60%a)空气清洁度JIS清洁度7级。此外,在与DNA类型测试有关的检查步骤中,从提取DNA到混合和密封样品和密封样品和放大试剂进行PCR扩增的步骤(以下是在以下是使用PCR扩增之前),并在pcr扩增之前进行了dna dna dnna dnna dna de dna,dna dna dna de dna de dna de tne dna de dna)可以在配备空调设备的测试设施中执行,至少在使用PCR扩增设备之前具有明显分开的过程和位置。 2)关于评估方法等。评估应根据科学警察研究所主任指定的程序进行。此外,检查设备等应由科学警察研究所主任指定,但是如果未指定检查设备,则可以使用通常用于DNA研究目的的检查设备。 5。评估材料⑴经过评估的材料受到DNA类型测试的主要材料(以下称为“材料”)如下。 a) Blood (excluding blood listed in the following:) - mixed liquids and mixed liquids of blood (excluding blood listed in: a) - blood stains, semen, semen and vaginal fluid, etc., saliva and saliva spots, hair with root sheath, skin, muscles, bones, teeth, nails, organs, etc. A) Blood collected from oral cells submitted by the suspect or victim, etc., and from the body of the suspect. 2)在处理测试材料时要注意的东西在收集材料时等。收集材料等。在收集材料等时,请注意以下内容:此外,我们将努力通过澄清收集状态和收集过程来确保证据能力,并且在处理材料时,我们必须提供足够的考虑以防止材料的污染以及与其他材料的接触和混乱。
碳轻质EPC操作的蓝图
©2022 Infosys Limited,印度班加罗尔。保留所有权利。Infosys认为本文档中的信息截至其发布日期是准确的;此类信息如有更改,恕不另行通知。Infosys承认本文档中提到的商标,产品名称和其他知识产权的其他公司的专有权利。除非明确允许,均不能复制,存储在检索系统中,或以任何形式或以任何方式传输,无论是在未经本文档中的Infosys Pressys limited和/或任何命名的知识财产权持有人的事先许可的情况下以电子,机械,印刷,影印,记录或其他方式传输。均不能复制,存储在检索系统中,或以任何形式或以任何方式传输,无论是在未经本文档中的Infosys Pressys limited和/或任何命名的知识财产权持有人的事先许可的情况下以电子,机械,印刷,影印,记录或其他方式传输。
朝着可互操作的量子安全网络
Mosca,Michele和Marco Piani,量子威胁时间表报告2021,全球风险研究所,2022年1月,https://globalriskinstitute.org/publications/2021-quantum-wartum-threat-timeline-timeline-timeline-report/