XiaoMi-AI文件搜索系统
World File Search System数学方法

理论物理学导论,2018 年秋季课程目标
PHZ 3113:理论物理学导论,2018 年秋季 课程目标:为入门理论物理学建立数学基础,包括经典力学、电动力学以及量子力学。 会议:MWF 下午 12:50 – 下午 1:40(第 6 节课),在 NPB 1200 授课 讲师:Khandker Muttalib;NPB 2140;电话:392-6699;电子邮件:muttalib@phys.ufl.edu 办公时间:(暂定)TThF 下午 3:00 – 下午 3:50(第 8 节课),在 NPB 2140 教材:推荐:《物理学和工程学的数学方法》,作者 KF Riley、MP Hobson 和 SJ Bence,第 3 版,剑桥大学出版社(2006 年)。其他优秀参考书:(1)《物理学家的数学方法》,GB Arfken 和 HJ Weber 编著,第 5 版,Harcourt/Academic Press(2001 年)。(2)《物理科学中的数学方法》,ML Boas 编著,第 3 版,Wiley(2005 年)。材料和用品费用:本课程不收取额外费用。期望:您不得抄袭他人的任何家庭作业解决方案,也不得寻求帮助,除非您已经尽力自己完成所有作业。如果您在真诚努力后仍未完成,我们鼓励您向同班同学、老师或任何其他人寻求帮助。我们还鼓励您在上述规则范围内组成小型学习小组并讨论家庭作业。我希望你们每个人都提交所有家庭作业;它们是课程不可或缺的一部分。如果您因任何原因错过作业,请立即与我联系,以获得批准,以便延迟提交并获得部分学分。本课程将涵盖大量材料,您应该准备投入大量时间。

物理2102b:现代物理学概论
先决条件:物理学1201a/b或物理学1401a/b或物理1501a/b或以前的物理学1301A/b,每种最小标记为60%,或者以前的物理学1028a/b,最低标记为80%;物理学1202a/b或物理1402a/b或物理学1502a/b或以前的物理1302a/b,每个物理学最低标记为60%,或者以前的物理学1029a/b,最小标记为80%;每个(微积分1000a/b或微积分1500A/b或数值和数学方法1412a/b或前者应用的数学1412a/b)和(计算1301a/b或calculus 1501a/b或数字和数学方法1414141A/B)的最低标记为60%。应用数学1413。最小标记为60%的综合科学可以代替物理1202a/b和微积分1301a/b。

物理学系理学硕士课程大纲(2020)
NLP-5 教科书:1. G. Arfken:《物理学家的数学方法》。Academic Press 国际版,1970 年 [第 4 章,6-11、13-15 章]。2. J. Mathews 和 RL Walker:《物理学的数学方法》。India Book House Pvt. Ltd. [第 4 章,6-9、16,附录]。3. Spiegel(Schaum 大纲系列):《复变量》4. AWJoshi:《物理学家的矩阵和张量》。参考书:1. HO Jeffreys 和 Lady Jefferys:《数学物理方法》。剑桥大学出版社,第 3 版,1978 年。2. RV Churchill:《复变量及其应用》。3. DR Halmos:有限维向量空间。4. C. Harper:数学物理导论。5. PM Morse 和 H. Feshbach:理论物理方法。第 1 卷和第 2 卷。McGraw Hil。6. DT Finkbeiner:矩阵和线性变换导论。7. PK Chattopadhyay:数学物理方法。Wiley Eastern。
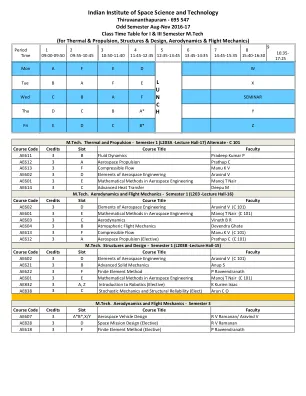
印度空间科学技术研究所
M.Tech. 热能与推进 - 第 1 学期(L203A - 演讲厅-17)替代 - C 101 课程代码 学分 时段 课程名称 教师 AE611 3 B 流体动力学 Pradeep Kumar P AE612 3 A 航空推进 Prathap C AE613 3 F 可压缩流 Manu KV AE602 3 D 航空航天工程要素 Aravind V AE601 3 E 航空航天工程中的数学方法 Manoj T Nair AE614 3 C 高级传热 Deepu M M.Tech.空气动力学和飞行力学 - 第 1 学期(L203 - 演讲厅-16) 课程代码 学分 位置 课程名称 教师 AE602 3 D 航空航天工程要素 Aravind V (C 101) AE601 3 E 航空航天工程中的数学方法 Manoj T Nair (C 101) AE603 3 C 空气动力学 Vinoth BR AE604 3 B 大气飞行力学 Devendra Ghate AE613 3 F 可压缩流 Manu KV (C 101) AE612 3 A 航空航天推进(选修) Prathap C (C 101) M.Tech.结构与设计 - 第 1 学期 (L203B - 演讲厅 - 15) 课程代码 学分 位置 课程名称 教师 AE602 3 D 航空航天工程要素 Aravind V (C 101) AE621 3 B 高级固体力学 Anup S AE622 3 F 有限元方法 P Raveendranath AE601 3 E 航空航天工程中的数学方法 Manoj T Nair (C 101) AE832 3 A、Z 机器人技术简介 (选修) K Kurien Issac AE838 3 C 随机力学与结构可靠性 (选修) Arun CO

对计算机中傅立叶变换的系统评价...
II。 傅立叶变换与计算机视觉之间的联系以分析和处理图片或视频,即计算机视觉学科,这与分析和从视觉输入中分析和提取有意义的信息有关,采用了许多数学方法。 傅立叶变换是计算机视觉的主食,作为最基本的数学方法之一。 图片可以过滤,可以提取功能,可以注册图片,并且可以借助傅立叶变换和检查其频率含量的检查来识别所有图案。 图像通常通过计算机视觉算法作为二维像素值矩阵处理。 使用傅立叶变换,我们可以通过将其从空间域转换为频域来检查图像的基本频率组件。 为此,在图像矩阵的每一行和列中分别执行傅立叶变换。 图像过滤是对计算机视觉的傅立叶变换。 噪声和其他异常在数字图像中很常见,降低了图像质量并使进一步的处理更加困难。 通过对图片进行傅立叶变换,我们可以隔离关键频率以减少其影响。 当在频域中表示图像时,可以应用过滤操作,例如高通滤波器,以带出小功能和低通滤波器,以使图像平滑并减少噪声。 逆傅里叶变换用于通过将其转换回空间域来获取过滤的图片。 [7]II。傅立叶变换与计算机视觉之间的联系以分析和处理图片或视频,即计算机视觉学科,这与分析和从视觉输入中分析和提取有意义的信息有关,采用了许多数学方法。傅立叶变换是计算机视觉的主食,作为最基本的数学方法之一。图片可以过滤,可以提取功能,可以注册图片,并且可以借助傅立叶变换和检查其频率含量的检查来识别所有图案。图像通常通过计算机视觉算法作为二维像素值矩阵处理。使用傅立叶变换,我们可以通过将其从空间域转换为频域来检查图像的基本频率组件。为此,在图像矩阵的每一行和列中分别执行傅立叶变换。图像过滤是对计算机视觉的傅立叶变换。噪声和其他异常在数字图像中很常见,降低了图像质量并使进一步的处理更加困难。通过对图片进行傅立叶变换,我们可以隔离关键频率以减少其影响。当在频域中表示图像时,可以应用过滤操作,例如高通滤波器,以带出小功能和低通滤波器,以使图像平滑并减少噪声。逆傅里叶变换用于通过将其转换回空间域来获取过滤的图片。[7]

科学中的生成人工智能......
彼得鲁宁·尤里·尤里耶维奇,哲学博士,莫斯科国立大学公共管理学院远程教育和科学与教育过程数字化副院长,管理数学方法与信息技术系主任。罗蒙诺索夫,俄罗斯科学院主席团科学委员会知识管理部门负责人,研究人工智能和认知研究方法

美国迈向 PET 瓶循环经济
• 使用详细的质量流模型对生命周期的所有阶段进行建模 • 用数学方法对约束进行建模 • 用再生树脂、焚烧电力、柴油和增强聚合物树脂模拟原生树脂 • 模拟新颖的回收途径 • 提高区域分辨率 • 计算循环性和 LCA 指标。

自动驾驶汽车导航系统的数学技术
摘要:高级数学方法在自动驾驶指导系统中经常使用,以确保它们正常,可靠和有效地工作。这个摘要谈论用于创建和改进这些系统的一些最重要的数学方法。一种重要的方法是概率机器人,它使用贝叶斯过滤器,例如Kalman滤波器及其非线性版本(扩展的Kalman滤波器和无味的Kalman滤波器)来估计车辆的状态并了解不总是清晰或响亮的传感器数据。路径规划算法(如A和Dijkstra的算法)需要找到最佳路线。基于抽样的方法,例如快速探索随机树(RRT),可以帮助解决高维空间中的问题。控制理论是保持汽车稳定并遵循您想要采取的方向的非常重要的部分。模型预测控制(MPC)经常使用,因为它可以在考虑系统行为时处理具有多个变量的控制作业。用于建模车辆如何移动,使用微分方程和动力学系统理论来显示控制输入如何影响车辆随着时间的推移的作用。此外,将来自LiDAR,相机和GP等不同来源的数据组合在一起的方法对于制作世界的准确而完整的图片非常重要。优化方法通过调整汽车的路径,减少能源利用并缩短行程时间来改善跟踪。通过使用老式的数学方法和新的,尖端的机器学习方法,自动驾驶汽车跟踪系统变得越来越聪明,更有能力和更可靠。除了这些方法外,还越来越多地将机器学习和深度学习添加到指导系统中,以帮助他们做出更好的决策,并在快速变化且非常复杂的设置中更加灵活。这些模型可以通过查找趋势并进行预测来从非常大的数据集中学习,这些预测对于找到对象,理解场景和自行做出决策等任务很重要。这使得他们可以在现实生活中广泛使用。

工程电气和计算机工程硕士
e01-数学方法E03-系统和控制E10-机器人技术E42-通信系统和网络E43-微型设备和制造过程E44-领域,波浪和光电e45-电气动力工程E47-信号处理E47-信号处理E48-计算系统F03 - MICROESS 6919191。 Engr 6971,Engr 6981或ENCS 6921