XiaoMi-AI文件搜索系统
World File Search System方波
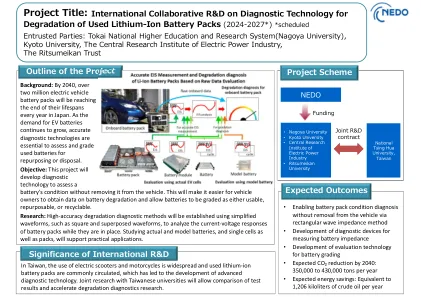
废旧锂离子电池组的退化(2024-2027 年...
无需将电池从车上拆下即可了解电池的状况。这将使车主更容易获得电池退化数据,并允许将电池评定为可用、可再利用或可回收。研究:将建立高精度退化诊断方法,使用简化波形(例如方波和叠加波形)来分析电池组在安装时的电流-电压响应。研究实际和模型电池以及单个电池和电池组将支持实际应用。

高可靠性/ES系列变频器
标准配置包含: 1个高速脉冲输出端子(支持0-50kHZ方波信号输出) 1(F0)/2(F1及以上)个数字量输出端子 1(F0)/2(F1及以上)个继电器输出端子 1(F0)/2(F1及以上)个模拟量输出端子(支持0-10V电压输出或0-20mA电压输出) 以下扩展为卡式: 3个数字量输出端子 3个继电器输出端子 3个模拟量输出端子,支持0-10V电压输出或0-20mA电压输出

示波器基础知识 - 凯斯工程学院 |
了解波形和波形测量 ..7 种波 ......................。。。。。。。。。8 个正弦波。。。。。。。。。。。。。。。...................9 方波和矩形波 .................9 锯齿波和三角波 ...............9 周期信号和非周期信号 ............10 同步信号和异步信号 .......。。10 个复杂波浪。。。。。。。。。。。。。。。。。。。。。。......10 种眼纹 ..。。。。。。。。。。。。。。。。。。。。。。。。。...10 个星座图 ..。。。。。。。。 < /div>.............11 波形测量 ...。。。。。。。。 < /div>.............11 频率和周期 ....< div> 。。。。。。。。。。。。。。。 < /div>......11 电压。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。11 幅度。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。12 相。。。。。。。。。。。。。。。。。。。。...............12 使用数字示波器进行波形测量 12

56F80x 旋转变压器驱动器和硬件接口
旋转变压器驱动器利用 56F80x 的两个 ADC 通道和一个定时器。在此特定应用中,必须将 ADC 通道配置为同时采样正弦和余弦信号。定时器提供方波信号的生成。该信号进一步由外部硬件调节为便于激励旋转变压器的形式。控制器根据旋转变压器测量的正弦和余弦信号估计转子轴的实际角度。然而,控制器不仅专用于实现 R/D 转换,因此旋转变压器的软件驱动程序必须以能够链接并在现有应用程序(例如 PMSM 矢量控制应用程序)中运行的方式进行设计。
56F80x 旋转变压器驱动器和硬件接口
旋转变压器驱动器利用 56F80x 的两个 ADC 通道和一个定时器。在此特定应用中,必须将 ADC 通道配置为同时采样正弦和余弦信号。定时器提供方波信号的生成。该信号进一步由外部硬件调节为便于激励旋转变压器的形式。控制器根据旋转变压器测量的正弦和余弦信号估计转子轴的实际角度。然而,控制器不仅专用于实现 R/D 转换,因此旋转变压器的软件驱动程序必须以能够链接并在现有应用程序(例如 PMSM 矢量控制应用程序)中运行的方式进行设计。
56F80x 旋转变压器驱动器和硬件接口
旋转变压器驱动器利用 56F80x 的两个 ADC 通道和一个定时器。在此特定应用中,必须将 ADC 通道配置为同时采样正弦和余弦信号。定时器提供方波信号的生成。该信号进一步由外部硬件调节为便于激励旋转变压器的形式。控制器根据旋转变压器测量的正弦和余弦信号估计转子轴的实际角度。然而,控制器不仅专用于实现 R/D 转换,因此旋转变压器的软件驱动程序必须以能够链接并在现有应用程序(例如 PMSM 矢量控制应用程序)中运行的方式进行设计。
56F80x 解析器驱动程序和硬件接口
旋转变压器驱动器利用 56F80x 的两个 ADC 通道和一个定时器。在此特定应用中,必须将 ADC 通道配置为同时采样正弦和余弦信号。定时器提供方波信号的生成。该信号进一步由外部硬件调节为便于激励旋转变压器的形式。控制器根据旋转变压器测量的正弦和余弦信号估计转子轴的实际角度。但是,控制器不仅专用于实现 R/D 转换,因此旋转变压器的软件驱动程序必须以能够链接并在现有应用程序(例如 PMSM 矢量控制应用程序)内运行的方式进行设计。
56F80x 旋转变压器驱动器和硬件接口
旋转变压器驱动器利用 56F80x 的两个 ADC 通道和一个定时器。在此特定应用中,必须将 ADC 通道配置为同时采样正弦和余弦信号。定时器提供方波信号的生成。该信号进一步由外部硬件调节为便于激励旋转变压器的形式。控制器根据旋转变压器测量的正弦和余弦信号估计转子轴的实际角度。然而,控制器不仅专用于实现 R/D 转换,因此旋转变压器的软件驱动程序必须以能够链接并在现有应用程序(例如 PMSM 矢量控制应用程序)中运行的方式进行设计。

谐波振幅总和用于频率分析
图3。许多正弦波构建了信号的频域表示。上排:时间域信号。下排:这些信号转换为频域。a)周期性正弦波在频域中以单个频率表示。b)周期性方波(厚,黑线)用许多特定的谐波频率(在顶部和底部底板上相应颜色的线)表示。从字面上看,这些(和更高的,未说明)的彩色线的总和在每个时间点都重建原始信号。c)与许多非特异性频率的组合表示非周期性的事件相关电位(ERP)信号(Retter等人,2020年的数据)。注意频域信号的几个属性:1)0频率bin反映了信号的平均幅度(DC偏移); 2)X轴分辨率是信号记录持续时间的倒数; 3)
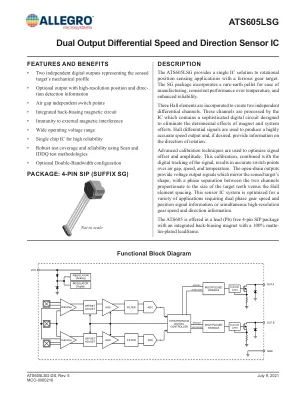
ATS605LSG - Allegro MicroSystems
在图 4 中,顶部面板标记为“机械位置”,表示目标齿轮的机械特征和设备方向。底部面板标记为“输出选项 # 1”(-S 变体),显示正向旋转齿轮(齿轮齿从引脚 4 侧传递到引脚 1 侧,图 3)的通道 A 和 B 数字 SPEED 输出信号对应的方波。最终结果是,当齿的前缘(传感器检测到的上升机械边缘)经过传感器表面时,传感器输出从高状态切换到低状态。如果旋转方向反转,使齿轮从引脚 1 侧旋转到引脚 4 侧(图 3),则输出极性反转(即,当检测到上升沿时输出信号变为高,并且齿是离传感器最近的特征)。