XiaoMi-AI文件搜索系统
World File Search System旋转式

Jurnal Sylva Lestari
抽象的森林碳动态建模用于估算匈牙利的短旋转碳库存生物能源种植园,对于更好地理解黑色蝗虫(Robinia pseudoacacia)和Poplar(Populus sp。)大气中的二氧化碳固执。研究目的是估算潜在的碳库存,并描述地面上方和下方的短旋转型生物能源种植园的碳分布。各种来源用于获取用于开发森林碳动态模型的参数化数据。CO2FIX建模v.3.2在数据分析中用于估计生物质,土壤,收获的木料和生物能源室中的碳库存。建模已经存在了45年。在这项研究中,模拟期结束时黑色蝗虫和杨树的总碳库存分别为64.13和131.08 mgc.ha -1。黑色蝗虫和杨树上方和地下的平均碳分配分别为0.76、19.76、1.80和21.67 mgc.ha -1。总而言之,在短旋转旋转式生物能源种植园中,杨树的表现优于黑色蝗虫。地面碳分配下方的分配要比地面上方高得多。因此,应通过环保土壤管理在地下分配下进行更多关注。
Lenco Bearcat 操作和维护手册
IV 照明和附件 28 电气/照明控制 28 前照灯 28 方向指示器 29 后视镜控制 30 挡风玻璃雨刷 30 固定高空转控制 31 行车灯 32 摆动灯 32 AUX 4 32 车顶安装聚光灯和 LED 33 VSP 风格低调照明 34 外部固定场景照明 35 灯条准备 35 加热挡风玻璃 36 后遮光 36 热像仪 36 对讲系统 38 仪表灯调光器 39 内部照明 40 后辅助加热/空调 40 后视备用摄像头 41 D/C 至 A/C 电源逆变器 41 电力绞盘 42 远程声学设备 (LRAD) 42 水监控器 43 辐射检测 43 无线电准备选项 44 可燃气体监控系统 44 炮口45 液压冲压杆系统 45 自给式呼吸器 (SCBA) 46 炮手支架 46 旋转式车顶舱口 47 笔记本电脑/冲压凸轮监控平台 49 油箱检修盖 49 举升车辆/更换车轮组件 50

1个机器学习揭示了AN ...
昆虫构成了Metazoa物种最富含物种的辐射,这是由于主动飞行的演变而成功。与翼龙,鸟类和蝙蝠不同,昆虫的翅膀不是从腿1演变而来的,而是通过生物力学复杂的铰链连接到体内的新型结构,可将特殊动力肌肉的微小,高频振荡转化为旋转式背后运动2。该铰链由一个称为硬化的细小结构的系统组成,这些系统通过柔性关节相互连接,并受专门对照肌肉的活性进行调节。在这里,我们使用遗传编码的钙指示剂对这些肌肉的活性进行了成像,同时用高速相机跟踪机翼的3D运动。使用机器学习方法,我们创建了一个卷积神经网络3,该网络3可以准确地从转向肌肉的活动中预测机翼运动,以及一个预测单个硬化物在机翼运动中的作用的编码器4。通过在动态缩放机器人苍蝇上重播机翼运动模式,我们量化了转向肌肉活动对空气动力的影响。一种基于物理的模拟,结合了我们的铰链模型,生成了与自由飞行苍蝇非常相似的飞行操作。这种综合性的多学科方法揭示了昆虫翼铰链的机械控制逻辑,可以说是自然界中最复杂和最重要的骨骼结构之一。

胆汁灰质的球形反射器具有单域纤维素纳米晶体微壳的可调颜色
通过干燥胆汁固醇液晶(CLC)对纤维素纳米晶体(CNC)干燥胆汁脱脂液晶(CNC)产生的曲面表现出的波长和极化选择性的bragg反射,这使这些生物库的纳米颗粒极有效,许多光学应用都极有效。虽然传统产生的纤维是在浮出水面,但如果给出了球形曲率,则CLC衍生的螺旋CNC排列将获得新的强大功能。干燥的CNC悬浮液液滴不起作用,因为在各向异性胶体液滴中动力学停滞的发作会导致严重的屈曲和球形形状的丧失。在这里,通过在不可压缩油滴的球形微壳中确定CNC悬浮液可以避免这些问题。这可以防止屈曲,确保强螺旋螺距压缩,并产生具有独特可见颜色的单域胆固醇球形旋转式旋转颗粒。有趣的是,受约束的收缩会导致自发穿刺,使每个粒子都有一个单个孔,可以通过该孔提取内部油相进行回收。通过在不同的分数下混合两种不同的CNC类型,在整个可见光谱中调整了反射颜色。新方法添加了一种多功能工具,以寻求使用生物培养的CLC,从而使球形弯曲的颗粒具有相同的出色光学质量和光滑的表面,与以前仅获得的曲线相同。
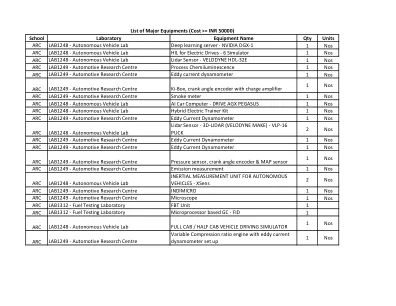
学校实验室设备名称数量单位ARC LAB1248
ARC LAB1249 - 汽车研究中心燃烧压力传感器 1 件 ARC LAB1248 - 自动驾驶汽车实验室直流电子负载 1 件 ARC LAB1248 - 自动驾驶汽车实验室摄像头 - BASLER TOF 摄像头 1 件 ARC LAB1249 - 汽车研究中心压电电阻压力传感器 1 件 ARC LAB1248 - 自动驾驶汽车实验室摄像头传感器 - Sekonix 5 件 ARC LAB1248 - 自动驾驶汽车实验室摄像头传感器 - Sekonix 5 件 ARC LAB1249 - 汽车研究中心涡流测功机 1 件 ARC LAB1248 - 自动驾驶汽车实验室小型地面机器人 1 件 ARC LAB1249 - 汽车研究中心压力传感器 1 件 ARC LAB1248 - 自动驾驶汽车实验室 NVIDIA AGX XAVIER 开发套件 2 件 ARC LAB1249 - 汽车研究中心带双缸柴油发动机的基础框架 1 件 ARC LAB1248 - 自动驾驶汽车实验室微孔气体扩散层 20 件 ARC LAB1249 - 汽车研究中心带直流发电机设置的变速发动机 1 件 ARC LAB1249 - 汽车研究中心 AVL 带 LED 遥控器的烟雾计 1 件 ARC LAB1249 - 汽车研究中心发动机组件 1 件 ARC LAB1249 - 汽车研究中心旋转式流量计 1 件 ARC LAB1249 - 汽车研究中心阴极射线示波器 1 件 ARC LAB1249 - 汽车研究中心铅酸电池 12 伏 100 AH 3 件

观察多效GDMN2O5
拓扑物理学一直是冷凝物理物理学中最活跃的领域之一,到目前为止,已经发现了一系列新兴现象,包括拓扑绝缘子,半法和超导体,以及它们相关的量子自旋旋转式霍尔效应和主要的巨大效果和大巨大效果等。[1 - 6]。实际上,作为数学的概念,拓扑可以明确或暗示主导各种物理行为,而不限于电子,声音,光子,光子谱带在动量空间中。拓扑结合和铁罗克系统的合并已经产生了一个完全不同的故事,即磁性和/或电动型电动型的真实空间纹理可以是拓扑的,包括天空,梅隆和涡流数量有整数绕组数[7-11]。最近,在一些多表演中已经揭示了拓扑物理学的另一个分支,该分支在特定的磁电(ME)过程中表现出拓扑的绕组行为。例如,对于四倍的钙钛矿TBMN 3 Cr 4 O 12,提出了拓扑不可取向的罗马表面来描述磁性诱导的极化(P)的三维轨迹[12,13]。另一个突破是ME在GDMN 2 O 5中的切换,该5响应磁性周期生成了半MN旋转的拓扑数[14]。有趣的是,这种受拓扑保护的我的过程可以理解为在量子水平上的me曲柄。
强烈的面内磁化和自旋极化(CO ...
摘要:Van der Waals(VDW)磁铁很有希望,因为它们具有掺杂或合金组成的可调磁性能,其中磁相互作用的强度,它们的对称性和磁各向异性可以根据所需的应用来调节。到目前为止,大多数基于VDW磁铁的自旋设备都限于低温温度,其磁各向异性有利于平面外或倾斜的磁化方向。在这里,我们报告了室温外侧自旋阀设备,其平面内磁化和VDW Ferromagnet的自旋极化(CO 0.15 Fe 0.85)5 GETE 2(CFGT)在异性捕获岩中使用墨烯。密度功能理论(DFT)计算表明,各向异性的幅度取决于CO浓度,是由CO在最外面的FE层中取代引起的。磁化测量结果揭示了上述CFGT中的室温铁电磁作用,并在室温下清除了延迟。由CFGT纳米层和石墨烯组成的异质结构用于实验实现旋转阀装置的基本构件,例如有效的自旋注入和检测。对自旋转运和汉尔自旋进液测量的进一步分析表明,在与石墨烯界面处的界面上具有负自旋极化,并由计算出的CFGT状态的自旋偏振密度支持。在室温下,CFGT的平面磁化证明了其在石墨烯侧旋转式设备中的有用性,从而揭示了其在自旋技术中的潜在应用。关键字:范德华磁铁,自旋阀,石墨烯,范德华异质结构,2D磁铁,平面磁化,自旋极化M

补充材料“可控的奇数库珀对在多杀手约瑟夫森连接处”
因此,可以通过执行各个量子数交换的所有可能组合来获得允许的对振幅(eqs。(S2)和(S3)),填充反对称条件等式。(S1)。这样做,我们发现八个允许尊重反对称条件的对对称类别,其中4对应于奇数相关性,请参见表S1。特定相关性是超导索引(sup。索引)在扩大允许的对对称性方面起着至关重要的作用。表S1在主文本的“ jjs中的us频间振幅”部分中显示为表1。在没有任何自旋粘合字段的情况下,出现对的相关性的自旋对称性与母体超导体的自旋对称性相同。因此,在我们的研究中允许的对对称类别(不存在旋转式粘合字段)是ESEE和OSOE对对称类别:它们对应于超导体指数中的偶数(奇数频率)旋转(奇数)均匀(奇数)旋转单元(奇数),甚至对应于超导器指数。通过包括一个自旋混合字段,可以获得表S1中对应于OTEE和OTOO对对称类别的奇数自旋 - 三个三角对振幅,可以用作超导阶段高度可控制的旋转源,从而可以使超导性旋转旋转的超导量。由于我们在主文本中提出的结果中没有自旋混合字段,因此其中的对对称性表现出父母超导体的自旋对称性,即自旋单旋。这是在主文本的“ JJS中的persupconductor对振幅”部分中特别讨论的。
爱达荷州教室中的人工智能:朋友还是敌人?
(博伊西)——说到技术进步,变化的速度有时感觉像闪电一样快。我们大多数人都清楚地记得谷歌和智能手机出现之前的生活。有些人可能会说那时的生活更好/更容易,但我们可以同意,曾经看似遥不可及的东西现在已成为生活的正常组成部分。仅以手机为例,技术已经将它们从旋转式变为微型计算机等等。随着人工智能的发展,我们再次参与了与技术互动方式的另一次变化,我们可能都对未来有所感触。毕竟,人工智能能够模拟人类智能,模仿我们的解决问题的能力、艺术天赋甚至我们的情绪。这令人兴奋,但也带来了一定程度的焦虑和对未知的不适。当家长和教育工作者与我谈论人工智能的进步及其对教育的影响时,大多数人都不知道该作何感想。如果我们谈论它是改进救生医疗程序或进一步了解太空的工具,许多人会对其作为一种行善工具的作用感到放心。但是,当我们谈论人工智能在课堂上的应用时,许多人对它可能会是什么样子感到焦虑。虽然我们正处于这些变化的开始阶段,但我想分享一下我对我们所知道的、我们所想的以及我们如何规划在面对这种快速发展的技术时会走向何方的看法。我们知道人工智能就在我们身边,而且会一直存在。我们知道人工智能已经成为许多工作场所的一个因素,许多雇主正在评估它对他们的日常运营意味着什么。我们还知道学生已经在自己与人工智能互动,尤其是我们的初中和高中学生。

支持 rfid 和 bim 的工人位置跟踪,以支持真实...
摘要:随着建筑工地越来越大、越来越复杂,维护建筑协议的需求也变得越来越必要。在施工现场安装材料、设备和人员的实时跟踪系统可以帮助项目经理加强建筑项目的安全性、质量控制、工人物流和维护当地法规。在本文中,我们将介绍集成无源射频识别 (RFID) 和建筑信息模型 (BIM) 以实时跟踪人员的方法。本研究的目的是利用 RFID-BIM 集成生成实时数据,以产生建筑协议控制的领先指标。建筑协议包括监控安全性、保障和验证是否维持旧金山经济和劳动力发展办公室的招聘要求。硬件组件包括无源 RFID 标签、门户 RFID 阅读器、固定旋转式阅读器、移动手持设备和云服务器。该系统部署在一个 900,000 平方英尺的医院项目中,该项目由三座主要建筑、125 名承包商和 1,200 名工人组成。提出了一种算法来减少和组织系统生成的数据。将 RFID 链接到行业基础类 (IFC) 已成为重点。初步结果表明,这些技术的集成产生的数据可用于实时资源跟踪、数据分析、法令合规性和区域安全违规。此外,该系统还提供实时可视化信息,可提供多种好处。值得注意的是,基于实验分析,我们证明 RFID 和 BIM 系统是一种实用且资源丰富的工具,可提供实时信息和位置跟踪以维持建筑协议控制。