XiaoMi-AI文件搜索系统
World File Search System无拖杆
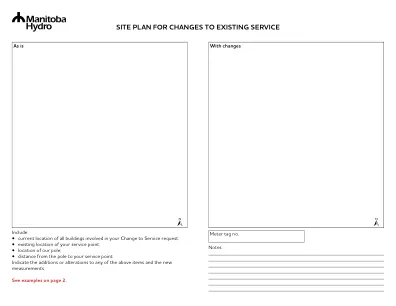
现有服务更改的站点计划
包括:•您更改为服务请求的所有建筑物的当前位置; •服务点的现有位置; •我们的杆位的位置; •从杆到您的服务点的距离。表示上述任何项目的添加或更改以及新的测量结果。

新 PR “C” 学校重点关注机组人员安全 MQ-25 ...
的位置大致相同,并且大致相似,着陆滑行灯开关上有两个小“圆顶”,以帮助通过手感将其与发射杆开关区分开来。此外,发射杆开关需要飞行员先将其从止动装置中拉出,然后再将其移至上或下位置。在我尝试关闭着陆/滑行灯时,我无意中抓住了发射杆开关并将其置于“向下”位置。当开关置于“向下”位置时,正常 NWS 会立即解除,只能通过按下操纵杆上的 NWS 按钮才能重新启用。通常,再次按住 NWS 按钮将提供高增益 NWS,但在发射杆向下的情况下,飞行员只能选择最高的低增益 NWS。由于发射杆现在已向下,即使按住高增益 NWS 按钮,我也只能选择低增益 NWS。这就是我得出的结论:我没有通过高增益 NWS 产生所需的转弯速率,这表明当我开始转向主滑行道时可能存在问题。
新 PR “C” 学校重点关注机组人员安全 MQ-25 ...
的位置大致相同,并且大致相似,着陆滑行灯开关上有两个小“圆顶”,以帮助通过手感将其与发射杆开关区分开来。此外,发射杆开关需要飞行员先将其从止动装置中拉出,然后再将其移至上或下位置。在我尝试关闭着陆/滑行灯时,我无意中抓住了发射杆开关并将其置于“向下”位置。当开关置于“向下”位置时,正常 NWS 会立即解除,只能通过按下操纵杆上的 NWS 按钮才能重新启用。通常,再次按住 NWS 按钮将提供高增益 NWS,但在发射杆向下的情况下,飞行员只能选择最高的低增益 NWS。由于发射杆现在已向下,即使按住高增益 NWS 按钮,我也只能选择低增益 NWS。这就是我得出的结论:我没有通过高增益 NWS 产生所需的转弯速率,这表明当我开始转向主滑行道时可能存在问题。
太平洋共同体秘书处
20 世纪 60 和 70 年代,渔民们开始不再使用传统的舷外支架独木舟在珊瑚礁外捕捞金枪鱼。一些渔民在他们的舷外支架独木舟上安装了小型舷外马达,而其他渔民则选择使用小型舷外驱动的开放式单体船。一开始,渔民们使用传统的珍珠贝诱饵和鱼竿,后来改为使用单丝线拖钓人造诱饵,有时也使用天然鱼饵。拖钓主要针对鲣鱼 ( Katsuwonas pelamis )、黄鳍金枪鱼 ( Thunnus albacares ) 和鲯鳅 ( Acanthocybium solandri ),不过也会捕捞许多其他物种。大多数渔民只是兼职捕鱼,黎明前出发,天一亮就到达渔场。 1978 年,估计在富纳富提捕获了数百吨金枪鱼,大多数金枪鱼重约 2-3 公斤,平均捕获量在 25 至 250 公斤/趟之间。

业余高尔夫球手如何为发球杆提供能量
高尔夫球手在球杆上所做的功是决定杆头速度的主要因素,它由四个因素组成:手部路径长度、手部路径上的平均力、球杆角距离以及在此距离上施加的平均力矩。主要目的是评估这些因素在产生杆头速度方面的相对重要性。使用发射监视器和光学系统记录了 76 名高尔夫球手的发球。使用回归来确定四个因素中每个因素的相对重要性。平均力占杆头速度变化的最大比例(r = 0.96)。还发现手部路径长度(r = 0.45)和平均高尔夫球手施加的力矩(r = 0.45)是预测杆头速度的有效指标,而角距离则不是(r = 0.14)。这些发现将适用于试图提高杆头速度的教练和高尔夫球手。
Clippermop™系列
ClipperMop™包括带有夹子和柔性聚酯垫的Celcon®热塑性拖把头,以提高擦拭效率。每个拖把的四个聚乙烯夹与尼龙紧固件绑在拖把头上。夹子是非浸泡性的,在将一个或多个刮水器牢固地固定在头部时,请勿释放颗粒和纤维。

ge Discovery 870 CZT和SIEMENS INTEVO SPECT -CT -ORBI
NEMA幻影图像是按照Nema Nu-2 1994中所述处理的,以获取空气,水和特氟龙中的残留分数(RF)。圆柱形ROI约为35%的杆高度和杆(ROIF)或一半(ROIH)物理直径在CT图像上,并在Tom的均匀部分中与大圆柱ROI一起绘制。在所有ROI中,计算每个像素(C)的平均计数,并在较大的ROI中计算标准偏差(SD)。恢复系数(RC)的热棒计算为C杆 /C均匀,冷棒的1- C杆 /C均匀。均匀部分中变异系数(COV)为SD/ C均匀。转化因子(CF)是使用各种高度和直径的大圆柱ROI从L和XL幻影获得的,并应用于NEMA均匀部分和NEMA放射性区域的均匀部分。

thread-catalog-2024.pdf
传奇高级SW棒的创新线。这是一个全新的四件式额外功能,轻,同时敏感的杆。它们是我们在彩带和湖泊捕鱼中最好的竞争蝇杆。由于所有耐盐水的组件,奖金是盐水飞行钓鱼的可能性。杆的设计,不断测试,并与目前最佳的竞争性飞行渔民LubošRoza(多重世界和欧洲冠军)以及奖杯钓鱼专家Františekekekekekekekekekekekekhanák密切合作。此外,Miloslav Hosensensidl,Jaromíršram和JosefHanák帮助进行了开发和积极的测试。