XiaoMi-AI文件搜索系统
World File Search System时使

当强大的人工智能适得其反时
尽管酒店业的人工智能 (AI) 近期取得了进展,但人们对于其对消费者隐私问题造成的意外后果知之甚少。通过结合定性和定量证据的实证研究,本研究表明,将 AI 定义为“强大”会减少 AI 对数据的控制(研究 3),从而增强隐私问题(研究 1-5)。值得注意的是,这种影响在消费者与人类代理的交互中减少,而在消费者与 AI 的交互中增加(研究 4)。最后,提供隐私保障的干预措施可以减少强大人工智能代理带来的隐私问题,并增强披露数据的意愿(研究 5)。我们的研究结果强调了使用强大 AI 时人机交互中出现的独特问题及其对消费者隐私问题的影响,并为酒店管理者提供了实际意义。

当人工智能成为老板时
远程工作、便携设备(如手机和平板电脑)、可穿戴设备(例如,可以跟踪位置、监测肌肉运动、情绪和健康状况)都导致与工作相关的人工智能不仅出现在工作场所,还出现在我们的家中。这可能导致隐私和家庭生活的侵犯,以及一种工作时间不再有界限的永远在线的文化。

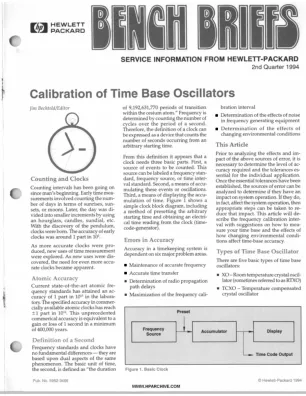
坚韧不拔的时代与地点
问题是什么?40 多年来,PNT 系统一直向公众开放,在此期间,我们作为消费者和整个澳大利亚行业越来越依赖它们。然而,近年来,技术故障和有针对性的网络攻击导致依赖该技术的人员和组织受到越来越多的干扰。例如,2023 年 4 月,当用于提高澳大利亚政府和商业服务定位精度的提供精确定位校正的卫星信号中断时,严重影响了依赖该信号进行精确制导和安全的农业和海事部门。网络攻击还多次试图破坏支持基础设施,导致在军事、消费者和工业应用中定位和指挥人员和基础设施面临挑战。

分娩时胎儿监护
本指南以 NICE 指南 - 分娩期间健康妇女及其婴儿的护理和每个婴儿都很重要 (EBC) 工具包 ( 附录 6 ) 为基础。本指南涵盖了缺氧的生理学,阐明了何时应使用电子胎儿监护 (EFM) 作为分娩时监测胎儿心脏的适当方法,并标准化了胎心宫缩图 (CTG) 的分类。它提供了在检测到异常时应采取的措施的指导。本指南涉及所有护理环境中对分娩中的胎儿的监测,以评估胎儿缺氧的风险。产科和助产人员应始终将其与完整的临床情况结合使用,以便他们提供一致有效的护理来监测分娩期的胎儿状况。本指南适用于处于活跃分娩期的女性——活跃分娩的诊断需要全面评估触诊子宫活动、孕妇行为和检查(见表 1)。它不应用于在没有触诊子宫活动的情况下对胎儿监护进行产前解释。包括潜伏期分娩,此时子宫活动不规律。有关产前胎儿监护解释的更多信息,请参阅大曼彻斯特和东柴郡 SCN 产前 CTG 解释指南。表 1:决定使用哪种 CTG 解释时要考虑的因素


长时储能(LDES)
在当今电网部署的总存储容量中(不包括抽水蓄能水电 (PSH)),绝大多数都采用锂离子电池,并且不是为了支持 LDES 容量(定义为 10 小时以上的调度)而设计的。作为 10 小时以下系统的主导电化学固定储能解决方案,跟踪锂离子电池指标非常重要,这样才能了解其他具有 LDES 功能的技术(例如压缩空气储能 (CAES)、液流电池和氢气)何时成为经济可行的替代方案。
摘录在行动时协议
就业助理讲师的形式包括在大学的职业道路(“任期”)中,并在高等教育条例(SFS 2024:673)中受到监管。对于此工作,助理讲师被雇用直到另行通知,但最多六年。如果存在特殊原因,就可以将工作延长至八年。特殊原因可以病假或育儿假。申请和检查后,助理讲师可以晋升为大学讲师。区域科学委员会建立了从助理讲师到大学讲师的特定标准。晋升向大学讲师的申请必须在该条例助理讲师到期之前的九个月之前提交给教师。在适用的情况下,其他信息要求以下代表性的性别代表申请就业。示例:教师特别欢迎女性/男性的申请,因为该系的大多数老师都是男人/女性。该部门的机会添加与上述标题无关的事实信息。此外,除了纯粹的机构演示外,该部门希望在广告序言中强调的纯机构介绍。示例:期望申请人能够承担需要良好理解瑞典语的行政和教育任务。