XiaoMi-AI文件搜索系统
World File Search System时应

停电时应考虑的疫苗保护选项和应急计划
* TempArmour ® Refrigeration 不保证此工具包含疫苗储存中的潜在威胁和/或应急准备选项的详尽列表。此工具的用户同意 TempArmour ® 对用户最终采取的任何应急准备选择或路径不承担任何责任。除 TempArmour ® Refrigeration 销售的产品外,提供的成本均为估算值,读者有责任自行进行价格比较/研究。
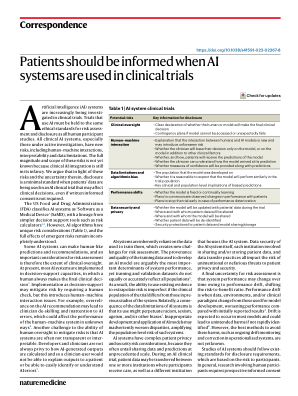
在临床试验中使用人工智能系统时,应告知患者
人工智能 (AI) 系统越来越多地被用于临床试验。使用人工智能的试验必须遵守与所有人类参与者研究相同的风险评估和披露道德标准。所有临床人工智能系统,尤其是正在积极研究的系统,都存在新的风险,包括人机交互、可解释性和数据限制。由于临床人工智能整合仍处于起步阶段,因此尚不清楚这些风险的全部大小和范围。我们认为,鉴于这些风险及其不确定性,当患者的数据用于可能影响临床决策的人工智能临床试验时,即使不需要书面知情同意,披露也是最低标准。美国食品药品监督管理局 (FDA) 将人工智能系统归类为“软件即医疗设备”(SaMD),其血统来自风险计算器等更简单的决策支持工具 1、2。然而,人工智能算法具有独特的风险考虑因素(表 1),而新出现的风险的全部影响仍未完全了解。一些人工智能系统可以做出类似人类的预测和建议,因此风险评估的一个重要考虑因素就是临床监督的程度。目前,大多数人工智能系统都是以决策支持能力实现的,其中始终由人做出最终的临床决策 3 。作为决策支持实施可以通过要求人工检查来降低风险,但这会引入人机交互问题。例如,过度依赖人工智能的建议可能会导致临床医生技能下降和对人工智能错误的忽视,这可能会以未知的方式影响人机系统的性能 4 。人类监督降低风险的能力面临的另一个挑战是人工智能系统通常不透明或不可解释。开发人员和临床医生并不总是了解人工智能生成的输出是如何计算的,因此临床用户无法向患者解释输出,也无法轻松识别或理解人工智能错误 5 。
战术显控系统人机交互中的特征整合设计研究 - 包装工程
编码特征作为预测结果,邀请用户进行认知情况调 研。从用户调研数据的计算结果可知,用户对不同特 征编码的认知存在一定的共性,有共同的认知习惯。 1 )就属性语义来看,认知效率主要受色相、明 度、饱和度、尺寸、位置、形状的影响。色相:国军 标对色彩的应用有明确的规范,在进行色相编码时, 应考虑用户对专用色彩属性的认知习惯,严格遵守色 彩使用规范。对于没有硬性规定的色彩,也应以用户 过往的知识、经验为基础进行编码设计。如,在界面 设计中,一般认为红色表示危险,黄色表示警告,绿 色表示安全。明度:实验表明,在深色背景下,明度 越高信息等级越高。战术显控系统复杂性较高,合适 的明度编码设计适合应用于信息层级设计,能够有效 降低用户的学习成本。饱和度:饱和度取决于该色中 含色成分和消色成分(灰色)的比例。含色成分越大, 饱和度越大;消色成分越大,饱和度越小 [14] 。高饱和 度的色彩编码方式更能引起视觉关注,帮助用户集中 注意力。形状:在战术显控系统中,涉及形状属性的 元素主要为图形和符号,包括通用类和特殊类。在进 行形状编码时,现有图符应遵循沿用的原则,新的图 符应结合现实形态、行业背景进行设计,以符合用户 认知习惯、缩短学习过程,提高交互效率。尺寸:根 据实验结果显示,信息尺寸的大小与信息的重要等级 成正比,信息越重要,尺寸越大。位置:用户对显示 屏上的信息关注度依次为中间、左上方、右上方、左 下方、右下方 [15] 。在进行界面布局时,应注意信息等 级与其在界面中位置的一致性,同时要保证同类信息 的位置编码统一。 2 )就情感语义来看,战时用户的生理和心理负 荷较高,任务情景的不确定性易增加用户的操作压 力 [5] 。在进行交互界面设计时应考虑信息编码元素的 情感性。从实验结果来看,影响情感语义的特征主要 为形状和色彩。尖锐的形态容易让用户产生较大的心 理压力,而圆润浑厚的形状更容易使用户平静。在进 行形状编码时,可采用倒角的设计手法。根据蒙赛尔 色彩体系对色彩要素的划分及实验结果,战术显控系 统的主色可以选用冷色调,明度、饱和度不宜过高, 以避免色彩刺激增加用户的焦虑感。而对于重点信息 和即时变化类信息,可采用高明度或高饱和度的色 彩,以提高用户的警觉性。

尿嘧啶DNA糖基酶产品处理指南
储存和稳定性: 尿嘧啶 DNA 糖基酶采用干冰或蓝冰运输。到货后储存于 -20°C 下,以获得最佳稳定性。 有效期: 在外包装盒标签上的有效期内,在推荐条件下储存并正确处理时,试剂盒可保持完整活性。 单位定义: 一个单位是指每分钟催化含尿嘧啶双链 DNA 释放 60 pmol 尿嘧啶的酶量。通过 37°C 下 30 分钟内在含有 0.2 mg DNA ( 10 4 -10 5 cpm/mg )的 50 mL 反应预混液中释放 [ 3 H]- 脲嘧啶来测量活性。 安全预防措施: 处理试剂前请阅读并理解 SDS (安全数据表)。首次发货时提供 SDS 的纸质版文件,此后可应要求提 供。 质量控制: Meridian 遵守 ISO 13485 质量管理体系运行。尿嘧啶 DNA 糖基酶在放行前经过广泛的活性测试。

北达科他州应发行
3. 如果个人符合第 62.1-04-03.1 节规定的互惠条件,并且持有其居住州颁发的相当于 2 级枪支和危险武器许可证,则个人可以根据本章携带隐藏式枪支。SL 2023,ch. 578(HB 1339),§ 3 62.1-04-03.1。互惠无证携带 62.1-04-02。携带隐藏式枪支或危险武器 - 许可证区别。2. 如果个人没有根据本章被禁止持有 2 级枪支和危险武器许可证,并且持有交通部或个人居住州或地区颁发的有效驾驶执照或非驾驶员身份证,则可以根据本章携带隐藏式枪支。.L. 2023,ch。 578(HB 1339),§ 注意:北达科他州以前仅允许北达科他州居民无证携带武器。2023 年 8 月 1 日,该州法律发生改变,现在任何根据州和联邦法律合法持有枪支的人都可以在北达科他州携带枪支,无需许可证/持枪证。必须携带驾驶执照或州颁发的身份证,62.1-04-04。按需出示执照。1. 每个人在携带隐藏枪支或危险武器时,如果需要携带隐藏携带许可证,应随身携带本州或其他州颁发的执照或本州颁发的隐藏枪支或危险武器执照的数字图像(存储在电子设备上),并在执法人员要求时将其交给任何现役执法人员进行检查。任何个人未能将执照或执照的数字图像交给执法人员,即为表面证据,表明该人非法携带隐藏枪支或危险武器。

应如何威慑俄罗斯?
乌克兰战争敲响警钟。俄罗斯入侵乌克兰标志着欧洲安全的转折点。包括荷兰军队在内的武装部队主要致力于远离本土开展促进和平的行动的日子已经一去不复返了。这场战争清楚地表明,北约领土本身正面临威胁。威慑和集体防御等源自冷战的概念再次变得重要。在这项由陆军司令部委托的研究中,我们试图回答如何应对这一新旧威胁的问题。这里的重点是通过威慑来防止战争。要了解如何遏制俄罗斯,有必要重新审视冷战时期的一些见解和概念。与此同时,人们认识到当前形势在许多方面存在不同。但不同的是,当时收集了大量有关俄罗斯的知识。俄罗斯入侵乌克兰让很多专家感到意外,这表明我们目前对俄罗斯的外交和国防政策了解甚少。
应如何威慑俄罗斯?
乌克兰战争敲响了警钟。俄罗斯入侵乌克兰标志着欧洲安全的转折点。武装部队(包括荷兰武装部队)主要致力于远离家乡的促进和平行动的日子已经一去不复返了。这场战争清楚地表明,北约地区本身现在正受到威胁。起源于冷战的概念,例如威慑和集体防御,再次变得重要。在这项由陆军司令部委托进行的研究中,我们试图回答我们应该如何应对这种新的、同时又是旧的威胁的问题。通过威慑预防战争是核心。要了解如何威慑俄罗斯,有必要重新审视冷战时期的一些见解和概念。同时,我们也认识到当前的情况在很多方面都有所不同。无论如何不同的是,当时收集了很多关于俄罗斯的知识。对于许多专家来说,俄罗斯意外入侵乌克兰表明我们目前对俄罗斯外交和国防政策知之甚少。

武装部队应推动
网络安全技术援助单位的组建/转换 可通过组建/转换某些现有的技术援助单位来创建网络安全技术援助单位。此类网络安全技术援助单位可隶属于印度知名 IT 组织。它将为武装部队提供高度专业化的人力,以满足其网络安全的专业要求。 军人退休前安顿假 武装部队每年都会释放高素质、训练有素、纪律严明、正值壮年的军人。其中很多人员虽然指挥能力不强,但在他们所选的领域都是非常合格的专家。应获得政府批准,为选定的军人提供 3 至 5 年的退休前安顿假,以满足印度学术界和工业界确定的职位的人力需求。 研究与开发机会 抵消条款中的研发选择 印度武装部队计划在未来十年内投入巨资购买设备。新的国防装备采购政策抵消条款要求外国公司在印度境内投资至少 30% 的合同成本,并将国防工业的 FDI 限额提高到 49%。应建议将这些资金的一定比例投资于印度学术界和工业界用于研发。与部队/团级训练中心/直属局的对接机械化部队和其他装备密集型战斗部队、训练中心和直属局每年可获得大约 100 万至 5 亿印度卢比的培训补助金。步兵战斗部队也是如此。可以鼓励学术界/工业界的初创组织与他们合作,以进入这个低预算领域,尽管收入规模较低。这将使他们的组织获得宝贵的
交付时
大家明白,第 2254 号决议不能照搬照抄。例如,前政权不会参与任何未来的进程。当然还有其他例子。显然,在许多方面都需要新的方法和思维方式。但大家普遍认为,过渡仍需实现第 2254 号决议提出的主要目标: - 第一:可信、包容和透明的、由叙利亚人主导和主导的过渡。关于这一点,我要明确一点:我不相信任何叙利亚人会要求基于教派或种族的配额或从其他国家引进模式,而是要包括叙利亚社会和叙利亚各方的最广泛群体,以激发公众对过渡的信心。 - 第二:确保过渡政府可信、包容和非宗派主义。 - 第三:通过可信和包容的进程制定新宪法。 - 第四:根据国际标准举行自由和公正的选举,包容所有叙利亚人。主席先生,31. 过去几周,叙利亚妇女更加坚定了她们的期望和意愿,