XiaoMi-AI文件搜索系统
World File Search System未售
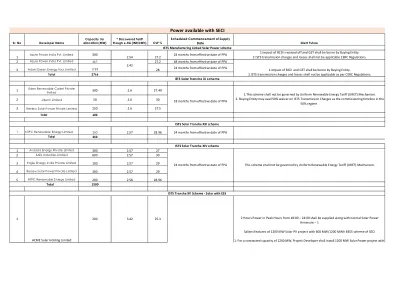
截至 2025 年 1 月 21 日未售出电力详情 (002).xlsx
对应于 RPD 未安排的能源单位。2.任何第三方销售的情况,在未满足指定需求的情况下,RPD 应承担 1.5 倍现行市场价格的罚款(参考价格为当天在印度运营的所有电力交易所的 DAM/G-DAM/RTM 中适用价格中的最高价格)。这将结束
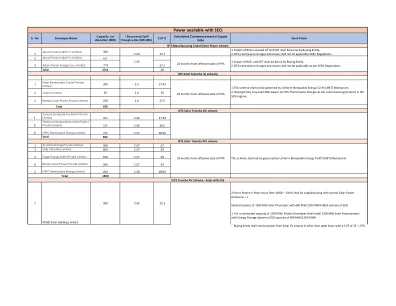
未售出电力详情.xlsx
2. 如果第三方销售未能满足指定需求,则 RPD 应承担现行市场价格 1.5 倍的罚款(参考价格为当天在印度运营的所有电力交易所的 DAM/G-DAM/RTM 中适用价格中的最高价格)。这将超出因未达到最低需求满足率而产生的罚款。
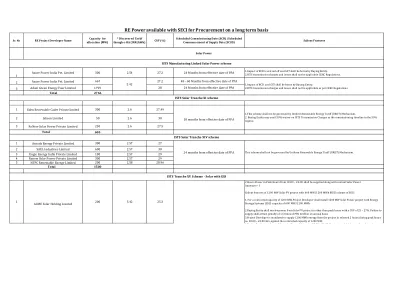
未售出电力详情 08 10 2024.xlsx
2.任何第三方销售的情况,如果指定需求仍未得到满足,RPD 将承担现行市场价格 1.5 倍的罚款(参考价格为当天在印度运营的所有电力交易所的 DAM/G-DAM/RTM 中适用价格中的最高价格)。这将超出因未达到最低需求满足率而产生的罚款。