XiaoMi-AI文件搜索系统
World File Search System机械工程


机械工程工程系
(民用和机械)课程成果:成功完成本课程后,学生应能够:应用数值方法来求解代数和超越方程,并使用插值公式得出插值多项式。在数值上求解微分方程和积分方程。将现实生活中的问题识别为数学模型。在土木工程应用领域应用概率理论和假设检验。前提条件:基本代数方程,概率,随机变量(离散和连续)和概率分布。单位I:代数和超验方程的解决方案简介 - 划分方法 - 词语方法,rendula-falsi方法和牛顿·拉夫森方法插值:有限差异,纽顿的前进和向后插值公式 - lagrange的公式。曲线拟合:通过最小二乘方法的直线,二级和指数曲线的拟合。单位-II:对普通微分方程的普通微分方程的初始价值问题的解决方案:泰勒的串联PICARD连续近似近似值 - 欧拉的方法和修改的Euler的方法 - kutta方法(第二和第四阶)的解决方案。单位-III:概率理论概率,概率公理,加法定律和概率,条件概率,BAYE定理,随机变量(离散和连续),概率密度函数,属性,数学期望。大型样本测试:单个比例的测试,比例差异,单个平均值和均值差的测试。单位IV:假设的估计和检验,大型样本测试估计参数,统计数据,抽样分布,点估计,无效假设的制定,替代假设,临界和接受区域,显着性水平,显着性水平,两种类型的误差和测试的功率。一个样本中参数和两个样本问题的置信区间单位V:小样本测试学生t分布(对单个均值,两个均值和配对t检验的测试),方差平等的测试(F检验),χ2-拟合良好的测试,χ2-属性独立性的测试。
B.Tech。土木工程B.Tech。机械工程B.Tech。机械工程
PO1工程知识:应用数学,科学,工程基础知识和工程专业知识,以解决复杂的工程问题。PO2问题分析:识别,制定,研究文献和分析复杂的工程问题,使用数学,自然科学和工程科学的第一原理得出实现结论。po3设计/开发解决方案:针对满足指定需求的复杂工程问题和设计系统组件或过程的设计解决方案,并适当考虑公共卫生和安全以及文化,社会和环境考虑。po4进行复杂问题的调查:使用基于研究的知识和研究方法,包括实验设计,数据分析和解释以及信息的综合以提供有效的结论。PO5现代工具使用:创建,选择和应用适当的技术,资源和现代工程以及IT工具,包括对复杂工程活动的预测和建模,并了解局限性。po6工程师和社会:应用上下文知识所告知的推理来评估社会,健康,安全,法律和文化问题以及与专业工程实践有关的随之而来的责任。po7环境与可持续性:了解专业工程解决方案在社会和环境环境中的影响,并证明了对可持续发展的知识和需求。PO8伦理:应用道德原则并致力于职业道德,责任以及工程实践的规范。



机械工程与技术
机械工程与技术 研究方向:金属成型技术 研究员姓名:CAPILLA GONZÁLEZ,GUSTAVO ORCID:0000-0002-6903-2567 任务:机械工程系,工程部,伊拉普阿托-萨拉曼卡校区 电子邮箱:g.capilla@ugto.mx 学术人员:机电一体化系统设计与集成。最近的研究项目:使用 3D 扫描设计和制作膝关节支撑矫形器的原型,使用增材制造改进膝关节支撑矫形器的设计和制造最近的科学文章:球抛光对 TRIP 钢板表面质量和机械性能的影响。 DOI:10.1007/s00170-021-07715-x 研究方向:具有延迟的系统 研究人员姓名:GOMEZ ALVAREZ、MARCO ANTONIO 任务:机械工程系、工程部、伊拉普阿托-萨拉曼卡校区 电子邮箱:marco.gomez@ugto.mx 学术人员:动力学与机器人学 最近的研究项目:设计和实施用于拾取和放置任务的机械手的基于延迟的控制算法。 最近的科学文章:关于具有多个延迟的微分代数系统的强 H2 范数:有限性标准、正则化和计算。 DOI:10.1109/TAC.2020.3046218 中立型时滞系统的必要充分稳定性条件(通过有限数量的数学运算)。 DOI:10.1109/TAC.2020.3008392

机械工程研讨会
摘要人类机器人合作(HRC)对于向新工业革命的持续过渡(行业4.0)来说是关键的,在该过渡中,机器人与人类合作伙伴一起工作以自动化重复性和身体上要求的任务,并在危险或极端工作环境中取代人类。同时,人工工作者监督和验证整个过程,通过利用其高级决策能力来做出关键决策。尽管如此,目前的HRC水平远远远远远远远远远远远远远远不超过人类的合作。从人类的角度来看,HRC的当前界面是不直观的,耗时的,并且缺乏智能。机器人了解人类工人的高级意图并做出适当的反应是一个挑战。此外,人类的专业知识,认知能力和决策能力尚未有效地转移到或使用机器人。当前的方法在处理复杂,多步骤任务的处理方面遇到了困难,并且需要大量的时间和数据,以使机器人能够向人类学习。为了解决这些问题并实现类似人类的机器人学习,张博士深入研究了一个多学科研究领域,该领域与包括机器人AI,计算机视觉(CV)和人类计算机相互作用(HCI)在内的多个领域相交。在这次演讲中,张博士将在三个方面介绍他的研究进展:1)扩展现实(XR)界面和新的范式,这些界面和新的范式可以使人与机器人之间的沟通和教学和学习与学习; 2)基于多模式的大型语言模型(MLLM)的交互式框架,用于恢复失败的长马操纵; 3)零射击,几乎没有射击和无监督的学习算法。
机械工程专业
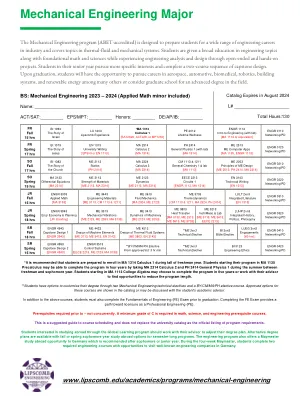
ENGR 0xy0 Networking and Professional Development 0 F, SP ENGR 1113 Introduction to Engineering (with lab) 3 F ENGR 3303 Applied Math 3 F ENGR 3513 Control Systems 3 SP ENGR 3943 Engineering Economy & Planning 3 SP ENGR 4943 Capstone Design 1 3 F ENGR 4953 Capstone Design 2 3 SP EECE 2213 Circuits 1 3 SP ME 2513 Mechanical Engineering Computer Apps 3 SP ME 2053 Principles of ME Design 3 f me 2113静态3 F,SP ME 2123动力学3 SP,SU ME 3113材料强度3 SP,SU ME 3443工程材料3 F ME 3613流体机制3 F ME 3703热力学3 F ME 3313机械振动3 SP ME 3413机械3 SP ME 3803 HEAD ME 3803 HEAD TRANS 3 SP ME 3803 HEAT TRANSERITION 3 SP ME 3213 3213 SP ME 3213(3213)3213( 4423机器元件的设计3 f me 4513热流体系统设计3 f选择以下2个课程(6个学分),用于ME 3XN3选举:Engr 3613,Me 4123,Me 4223,Me 4223,Me 4303,Me 4303,Me 4523,Me 4613,Me 4713,Me 4713,Me 4713,我4723,我4723,我4723,我4723,我4723,我4723,我47433,我47433,ME 47444333,我4744447433,我47433,我474433,我474433,我474433,我474433,47433,我47433,我474433,我47333,我47333,我47333,注意:机械工程专业的所有学生都必须在所有必需的数学,科学和工程学先决条件课程中取得“ C”或更高。