XiaoMi-AI文件搜索系统
World File Search System机载雷达

CReSIS 机载雷达和冰雪平台...
本文提供了冰盖遥感中心 (CReSIS) 雷达和平台的更新和概述,包括这些系统的代表性结果。CReSIS 雷达系统的工作频率范围为 14 – 38 GHz。每个雷达系统的特定频带由所需的信号穿透深度、测量分辨率、分配的频谱和天线工作频率(通常受飞机集成的影响)决定。我们还重点介绍了最近的系统进步和未来工作,包括 (1) 增加系统带宽;(2) 小型化雷达硬件;(3) 提高灵敏度。对于平台开发,我们正在开发更小、更易于操作且更便宜的无人机系统。下一代平台将进一步扩大具有垂直起降能力的科学家的可及性。

海洋表面流机载雷达 (OSCAR)
1 英国南安普敦国家海洋学中心 2 意大利米兰 MetaSensing 3 西班牙巴塞罗那 ICM-CSIC 4 法国布雷斯特 Ifremer 5 德国汉堡 Hereon 6 法国布雷斯特法国能源海洋公司 7 西班牙 Radarmetrics 8 荷兰 ESA-ESTEC 摘要 – 海洋与大气、陆地和冰在多个空间尺度上相互作用,包括在高分辨率光学图像中经常观察到的细亚中尺度。然而,人们对它们的动态知之甚少。SeaSTAR 是一种创新的卫星任务概念,它提议通过以 1 公里分辨率绘制洋流和风矢量来解决这一空白。在本文中,我们介绍了 OSCAR 仪器——SeaSTAR 概念的机载演示器——以及 2022 年 5 月在伊鲁瓦兹海进行的科学活动的首批成果。OSCAR 的功能通过地面真实数据得到展示,初步结果非常有希望。这些结果为使用 OSCAR 作为科学工具提供了大门,以提供千米级海洋和大气动力学的独特 2D 综合视图。关键词:多普勒海洋学、总表面流、风
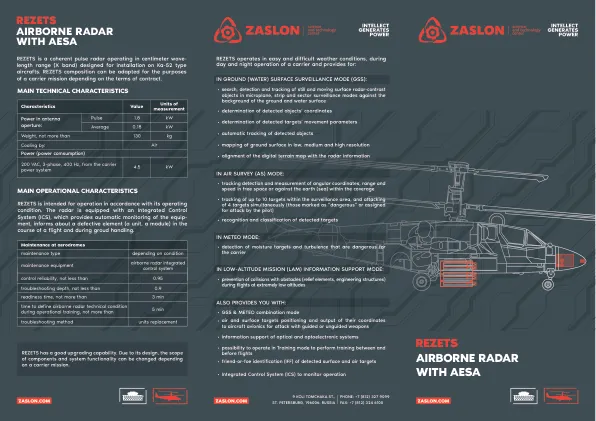
REZETS 机载雷达采用 AESA
REZETS 旨在根据其运行条件进行操作。雷达配备有综合控制系统 (ICS),可自动监控设备,并在飞行过程中和地面处理期间报告有缺陷的元件(单元、模块)。
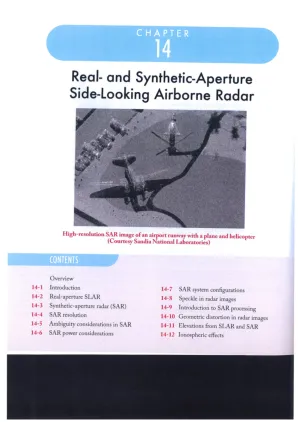
真实和合成孔径侧视机载雷达
tohoku.ac.jp › 用户 › sato PDF 2015年1月7日 — 2015年1月7日 雷达通常被称为侧视机载...胶片记录被数字采样和存储所取代。...尺寸和可靠性。

技术调查 - TWT 和 MPM - dB 控制
dbcontrol.com › March-2010-JED PDF 2010 年 3 月 17 日 — 2010 年 3 月 17 日,除了效率、可靠性和功率增加方面的一些改进...用于机载雷达应用(SAR、多...数字8页

ASAR 产品手册 - ESA Earth Online
esa.int › ESA_DOC › ENVISAT PDF 2013 年 2 月 6 日 — 2013 年 2 月 6 日 EMAC 95 机载雷达实验证明了双偏振数据的价值...堆叠 ER SAR 干涉测量法和低分辨率数字。 ..
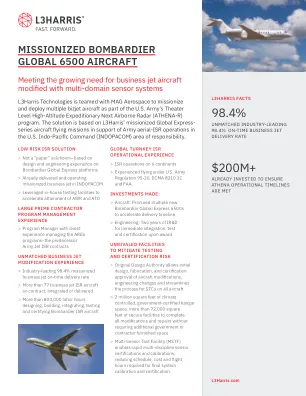
密钥管理设施(KMF)数据表DS717
L3HARRIS Technologies与MAG Aerospace合作,将多个Bizjet飞机传播为美国陆军剧院一级高空远征队的一部分,下一个机载雷达(Athena-R)计划。该解决方案基于L3HARRIS宣教的全球快报飞机飞行任务,以支持美国印度太平洋司令部(Indopacom)责任领域的陆军航空ISR行动。

英国雷达评论
正如 RADAR 82 所证实的,英国的雷达行业非常活跃,但雷达的发展与美国并不完全一致。这部分是因为不同的运营需求和不同的市场条件,部分是因为当地的时尚和创新的偶然性。大多数大型电子公司都有专门负责雷达一个或多个方面的部门。随着雷达界在华盛顿特区举行的国际雷达会议上标志着本世纪技术的进步,有人建议在这些交易中发表对英国雷达技术的回顾。因此,我们准备了这篇混合评论,我们希望它能激发您的兴趣并提供参考来源。在该项目开始时,我们意识到,可能被宽泛地描述为雷达的努力领域非常广泛,以至于必须应用许多限制。已省略 300 GHz 以上的雷达,因此不包括激光雷达和激光测距仪。为了节省页面预算,还省略了二次雷达、仪表雷达和一些无线电导航辅助设备(高度计、多普勒导航仪),以及雷达数据处理器。HF 雷达的内容很少。最后,组件技术被认为通常不在本评论的范围内。本评论非常简单地分为地面雷达、海军/海洋雷达、机载雷达、导引头和大学计划等领域,并按此顺序介绍。由于多种原因,尽管在机载雷达部分已经在这方面进行了认真的尝试,但无法在整篇论文中进行全面的处理。此次审查的准备工作因安全限制而受到阻碍,这反映在许多领域无法获得技术细节。
3.45 GHz 拍卖研讨会
• 陆军和美国海军陆战队的地面雷达 • 三维空中搜索和监视雷达系统,提供有关火炮或火箭及其发射场的精确信息 • 探测空中物体,并测量目标高度、距离和方位 • 一些空中目标很小,一些目标在 300 海里的范围内被探测到 • 除选定的作战任务外,还用于国内测试、系统校准和培训 • 空军机载雷达 • 提高飞行安全性并促进货机的编队飞行 • 编队规模可以从两架飞机编队到多机编队 • 用于国内高节奏训练行动 • 系统预计将于 2034 年腾出 3.45 GHz 频段

简介 - 免费
乔治·史汀生十几岁时还是一名业余无线电爱好者,他开始对无线电波着迷,并设计和制造了发射器和接收器。他第一次接触雷达是在第二次世界大战初期,当时他在斯坦福大学超高频实验室外的实验间隙测量海军飞艇的回波。获得电气工程学士学位后,他在加州理工学院学习了一些额外的课程,在鲍登学院和麻省理工学院的海军雷达学校学习,最后成为攻击运输机上的电子军官。战后,他担任南加州爱迪生变频项目的工程师,并在项目完成后加入了诺斯罗普的斯纳克导弹项目。在那里,他偶然涉足技术出版物和电影。1951 年,他被休斯飞机公司聘用,负责撰写一本广为流传的技术期刊《雷达拦截器》。在随后的几年里,他与公司的顶级设计师密切合作,亲眼目睹了机载雷达从第一批全天候拦截器的简单系统到当今先进的脉冲多普勒系统的迷人演变。他见证了第一枚雷达制导空对空导弹的发展、数字计算机首次融入小型机载雷达、激光雷达、SAR 和可编程数字信号处理器的诞生;他还看到了机载雷达技术向太空应用的扩展。1990 年退休后,他仍然活跃在该领域,在莫哈韦国家试飞员学校教授现代雷达短期课程,撰写有关休斯天线辐射图和 RCS 测量设施的技术手册,制作有关新型 HYSAR 雷达的全程叙述交互式多媒体演示,并为 1998 年版《美国百科全书》撰写有关雷达的文章。