XiaoMi-AI文件搜索系统
World File Search System标称值
适用于偏远住宅负载的高速飞轮储能混合光伏系统
摘要:由于微电网中的系统惯性低,频率可能会迅速偏离标称值,导致系统完全停电,除非有足够的旋转备用来平衡供电和需求负载。孤岛运行下微电网的不稳定问题最近引起了特别的关注。柴油发电机被认为是理想的旋转备用,可在孤岛系统中为负载提供备用电源以及可再生能源。然而,柴油发电机的高维护成本和二氧化碳排放量是有害因素,这促使人们寻求更具成本效益和更清洁的技术。在孤岛系统中,将储能系统 (ESS) 与发电机集成不仅可以降低发电机的维护成本,还可以通过限制其运行时间来减少二氧化碳排放。本文提出了一种孤岛光伏混合微电网系统 (PVHMS),利用飞轮储能系统 (FESS) 作为电池技术的替代方案,以支持光伏系统并满足拥有 100 户住宅的小型住宅镇的峰值需求。当光伏系统和飞轮储能无法满足负载需求时,柴油发电机在孤岛系统中用作旋转备用,以维持孤岛系统的稳定性。对此类系统的分析结果表明,适当规模的飞轮储能技术为支持独立光伏系统的运行提供了可行的解决方案。此外,与飞轮储能系统(意味着柴油发电机始终在运行)的情况相比,二氧化碳排放量和燃料消耗的减少量已经量化。
可扩展快速光路交换的电路设计
2.1 (a) 垂直 MEMS 耦合器的 (a) 关闭状态和 (b) 开启状态示意图 - 图片取自 [14] (c) MEMS 开关单元的 SEM - 图片取自 [22] . . 7 2.2 MEMS 开关元件的代表性传递函数。 . . . . . . . . . . . . . 8 2.3 (a) 128x128 SiPh MEMS 纵横开关 (b) 4x4 CMOS 高压驱动芯片倒装芯片接合到 SiPh MEMS 芯片的 GDS 屏幕截图。 . . . . . . . . . . . . 9 2.4 (a) SuperSwitch 1 高压驱动芯片的显微照片 (b) 驱动芯片的卡通布局图。 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10 2.5 假设采用单个 CMOS 芯片,则激活 128 行中的 1 行的简单原理图。 . 11 2.6 假设采用 4x4 CMOS 芯片阵列,则控制 128x128 开关的原理图。 12 2.7 (a) N c = 1 时第 0 列和第 1 列的逻辑 (b) N c = 2 时第 0 列和第 1 列的逻辑。 13 2.8 (a) 带有用于调试的环回多路复用器的 SuperSwitch1 控制芯片扫描架构的最终原理图。 (b) SuperSwitch1 控制器芯片的最终参数。 . . . . . 14 2.9 (a) SuperSwitch1 高压驱动电路原理图。 (b) 所有电源及其标称值的列表。 . . . . . . ... 19 2.13 (a) HVDD = 70 V、HVSS = 65 V 时所有角的 VSS 电阻 shmoo 图。 (b) 相同图,但 HVDD = 70 V、HVSS = 66 V。 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21 2.16 (a) 凸块 CMOS 焊盘的显微照片。(b) Au UBM 和 Au 微凸块的横截面。(c) 使用不同厚度的 UBM 在 SiPh 芯片上补偿 CMOS 焊盘高度差异的键合工艺说明。. . . . . . . . . 22

使用... 计数电子的实际方面 - NIST 的 TSAPPS
由外部信号控制的单个电子的转移首先由 Pothier 等人于 1991 年在具有 3 个铝结的单电子隧穿 (SET) 泵中实现。。该装置产生的电流在标称值 I = ef 的 1/103 以内,其中 e 是基本电荷,f 是泵浦频率。NIST 制造了具有 5 个结 [2] 和 7 个结 [3] 的类似泵,结果显示每个周期的误差分别约为 106 分之 5 和 108 分之 1。在这些装置中,每个电子转移事件都可以通过附近的 SET 晶体管进行监控,因此泵浦的电子实际上可以被“计数”。7 结泵足以用于基础计量,特别是基于计数电子的电容标准 [4]。此类标准于 1998 年首次展示 [5],最近已完成完整的不确定度预算 [6]。过去 10 年,人们的努力并未追求更低的误差率,而是集中于 (1) 了解误差率理论与实验之间的巨大差异 [7–10]、(2) 量化泵用于电容标准时的性能限制 [11],以及 (3) 通过使用更少的结实现相同的误差率来简化泵操作 [12,13]。此外,人们还探索了其他几种可以通过传输单个电子(或超导状态下的库珀对)产生电流的装置。在 [14] 中可以找到对这些方法的广泛(但有些过时)的回顾。请参阅本书 [15] 中 Kemppinen 等人的文章。了解最近的参考资料和对这种新方案的详细讨论。总的来说,这些方法承诺的电流比 SET 泵可能提供的电流大得多,但尚未证明计量所需的精度。本文首先回顾了 SET 泵的操作和错误机制,然后讨论了使用 SET 泵的几个实际方面。目的是让读者了解在计量实验中实施 SET 泵的主要挑战,并

第 155 章 – 建筑规范
a. 混凝土楼板厚度标称值为 4 英寸。如果回填前未提供此类楼板,则应将一根 36 英寸垂直 4 号钢筋嵌入基础,最大间距为 84 英寸,或者在基础中安装一个全深度标称 2 英寸深度 x 4 英寸宽度的键槽。b. 所有钢筋均应至少符合 ASTM A6175 40 级标准并变形。钢筋的放置位置应距墙内表面 3 英寸,并符合《国际建筑规范》第 18、19 和 21 章的规定。c. 用作回填的材料应为精心放置的中等或高渗透性粒状土壤,并应使用《国际建筑规范》第 1805.4 节规定的经批准的排水系统进行排水。当土壤中含有大量粘土、细粉砂或类似的低渗透性材料或膨胀土,或当回填材料未排干或墙体附近需要放置异常高的附加费时,必须使用专门设计的墙。d. 地基墙最大高度为 10 英尺,净高度为 9 英尺 8 英寸。e. 净地基墙高度是从地下室板顶部到地基墙顶部测量的。f. 支撑 3 层楼的混凝土地基墙厚度应增加 2 英寸。g. 支撑 3 层楼的砖石地基墙厚度应增加 4 英寸。h. 最大 24 英寸 oc 的 5 号钢筋是经批准的替代方案。i. 最大 30 英寸 oc 的 5 号钢筋是经批准的替代方案。j. 砖石墙的砂浆应为 M 型或 S 型,砖石应采用流动粘结法砌筑。k 如果砖石砌块的标称厚度为 12 英寸,则墙体可以不加固。
锂离子电池在储存条件下的高效电化学健康状态模型
摘要:电池容量衰减会对电池组的使用寿命以及电动汽车的剩余价值产生负面影响。开发一种用于预测存储条件下健康状态 (SOH) 的衰减模型是开发算法以最大限度延长这些系统剩余使用寿命的关键方面。众所周知,与更多经验或数据驱动的模型相比,电化学衰减模型具有更出色的预测能力,但这些模型在计算效率方面仍需改进。因此,在这项工作中,我们引入了一种简单的降阶锂离子电池电化学衰减模型。该模型考虑了三种关键的老化机制,能够预测各种日历老化条件下的 SOH。集中模型结果与基于单个粒子的衰减模型进行了验证,结果显示出接近的一致性,即使模拟时间减少了 2 个数量级。这表明在实际应用中,考虑和纠正存储对电池性能和寿命的影响具有巨大的潜力。 ■ 简介 近年来,通过最大限度地提高电池利用率来最大限度地节约能源和减少排放已成为电动汽车 (EV) 行业关注的话题。此外,随着可再生能源发电和能源生产的增加,研究储存这种能源的方法和技术变得更加重要。锂离子电池因其更高的功率和能量密度、安全性和可靠性,在电动交通和储能解决方案领域发挥着关键作用。尽管锂离子电池表现出优于其他电化学系统的可靠性,但性能下降是不可避免的。电池性能的不可逆衰减将影响整个系统的剩余价值。因此,锂离子电池的健康状态 (SOH) 一直是电池管理系统的一个关键主题。1 SOH 本质上表示电池的当前性能与新电池测得的标称值之比。电池的容量、功率能力和阻抗都决定了电池的 SOH。为了保证系统寿命的延长,有必要开发能够在考虑各种老化过程的同时操作电池的电池管理系统。对于锂离子电池,老化过程可分为两种模式,即日历老化和循环老化。当施加外部电流时,电池会经历循环老化过程
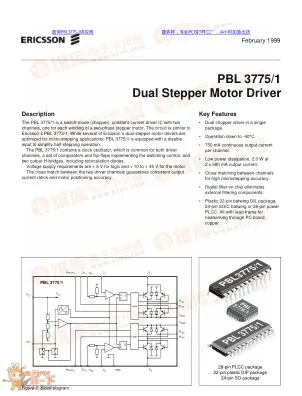
PBL 3775/1 双步进电机驱动器
2 1 [8] M B1 电机输出 B,通道 1。当相位 1 为高电平时,电机电流从 M A1 流向 M B1。3 2 [10] E 1 共发射极,通道 1。此引脚连接到传感电阻 R S 接地。4 3 [11] M A1 电机输出 A,通道 1。当相位 1 为高电平时,电机电流从 M A1 流向 M B1。5 4 [12] V MM1 电机电源电压,通道 1,+10 至 +40 V。V MM1 和 V MM2 应连接在一起。6,7 5, 6, [1-3, 9, GND 接地和负电源。注意:这些引脚用于散热。18,19 17, 18 13-17, 确保所有接地引脚都焊接到足够大的铜接地平面 28] 上,以实现高效散热。8 7 [18] V R1 参考电压,通道 1。控制比较器阈值电压,从而控制输出电流。9 8 [19] C 1 比较器输入通道 1。此输入检测传感电阻上的瞬时电压,由内部数字滤波器或可选的外部 RC 网络滤波。10 9 [20] 相位 1 控制输出 M A1 和 M B1 处的电机电流方向。当相位 1 为高电平时,电机电流从 M A1 流向 M B1。11 10 [21] Dis 1 禁用通道 1 的输入。当为高电平时,所有四个输出晶体管均关闭,导致输出电流迅速降至零。12 11 [22] RC 时钟振荡器 RC 引脚。将一个 12 kohm 电阻连接到 V CC 并将一个 4 700 pF 电容连接到地,以获得 23.0 kHz 的标称开关频率和 1.0 µ s 的数字滤波器消隐时间。 13 12 [23] V CC 逻辑电压电源,标称值为 +5 V。 14 13 [24] Dis 2 禁用通道 2 的输入。当为高电平时,所有四个输出晶体管均关闭,从而导致输出电流迅速降至零。15 14 [25] 相位 2 控制输出 M A2 和 M B2 处的电机电流方向。当相位 2 为高电平时,电机电流从 M A2 流向 M B2。16 15 [26] C 2 比较器输入通道 2。此输入检测传感电阻上的瞬时电压,该电压由内部数字滤波器或可选的外部 RC 网络滤波。17 16 [27] V R2 参考电压,通道 2。控制比较器阈值电压,从而控制输出电流。20 19 [4] V MM2 电机电源电压,通道 2,+10 至 +40 V。V MM1 和 V MM2 应连接在一起。21 20 [5] M A2 电机输出 A,通道 2。当相位 2 为高电平时,电机电流从 M A2 流向 M B2。22 21 [6] E 2 共发射极,通道 2。此引脚连接到接地的传感电阻 R S。23 22 [7] M B2 电机输出 B,通道 2。当第 2 相为高电平时,电机电流从 M A2 流向 M B2。1,24 NC SO 引脚 1 和 24 为“未连接”
PBL 3775/1 双步进电机驱动器
2 1 [8] M B1 电机输出 B,通道 1。当相位 1 为高电平时,电机电流从 M A1 流向 M B1。 3 2 [10] E 1 共发射极,通道 1。此引脚连接到传感电阻 RS 到地。 4 3 [11] M A1 电机输出 A,通道 1。当相位 1 为高电平时,电机电流从 M A1 流向 M B1。 5 4 [12] V MM1 电机电源电压,通道 1,+10 至 +40 V。V MM1 和 V MM2 应连接在一起。 6,7 5, 6, [1-3, 9, GND 接地和负电源。注意:这些引脚用于散热。 18,19 17, 18 13-17, 确保所有接地引脚都焊接到适当大的铜接地平面 28] 上,以实现有效散热。 8 7 [18] V R1 参考电压,通道 1。控制比较器阈值电压,从而控制输出电流。 9 8 [19] C 1 比较器输入通道 1。该输入感测感测电阻两端的瞬时电压,由内部数字滤波器或可选外部 RC 网络滤波。 10 9 [20] 相位 1 控制输出 M A1 和 M B1 处的电机电流方向。当相位 1 为高电平时,电机电流从 M A1 流向 M B1。 11 10 [21] Dis 1 通道 1 的禁用输入。当为高电平时,所有四个输出晶体管都关闭,导致输出电流迅速减小至零。 12 11 [22] RC 时钟振荡器 RC 引脚。将一个 12 kohm 电阻连接到 V CC ,并将一个 4 700 pF 电容连接到地,以获得 23.0 kHz 的标称开关频率和 1.0 µ s 的数字滤波器消隐时间。 13 12 [23] V CC 逻辑电压电源,标称值为 +5 V。 14 13 [24] Dis 2 通道 2 的禁用输入。当为高电平时,所有四个输出晶体管都将关闭,从而导致输出电流迅速减小到零。 15 14 [25] 相位 2 控制输出 M A2 和 M B2 处的电机电流方向。当相位 2 为高电平时,电机电流从 M A2 流向 M B2。 16 15 [26] C 2 比较器输入通道 2。该输入感测传感电阻两端的瞬时电压,该电压由内部数字滤波器或可选的外部 RC 网络滤波。 17 16 [27] V R2 参考电压,通道 2。控制比较器阈值电压,从而控制输出电流。 20 19 [4] V MM2 电机电源电压,通道 2,+10 至 +40 V。V MM1 和 V MM2 应连接在一起。 21 20 [5] M A2 电机输出 A,通道 2。当相位 2 为高电平时,电机电流从 M A2 流向 M B2。 22 21 [6] E 2 共发射极,通道 2。此引脚连接到接地的传感电阻 RS。 23 22 [7] M B2 电机输出 B,通道 2。当相位 2 为高电平时,电机电流从 M A2 流向 M B2。1,24 NC SO 引脚 1 和 24 为“未连接”