XiaoMi-AI文件搜索系统
World File Search System检测

一种检测潜在模式混淆的自动化方法
通过观察、问卷调查和其他技术,心理学家已经能够引出个体操作员(通常是飞行员)的心理模型。然而,将设计与特定个体的心理模型进行比较只能提供非常具体的信息;我们感兴趣的是设计是否容易产生模式混淆,为此,将设计与通用心理模型进行比较比将设计与个体心理模型进行比较更有用。这种通用模型可以从培训材料中提取(培训手册的目的之一,通常是隐含的,就是诱导足够的心理模型),也可以指定为明确的要求(例如,“这个按钮应该像一个切换按钮一样运行”)。认知研究对这些模型的性质提供了两个重要见解:首先,它们可以用称为“状态机”的数学结构紧凑地表示;第二,它们往往相当简单(这可以通过应用两个规范的简化来解释[3])。

文本到图像生成模型中的开放式偏差检测
文本到图像生成模型正变得越来越流行,公众可以访问。由于这些模型看到大规模的部署,因此有必要深入研究其安全性和公平性,以免消散和永久存在任何形式的偏见。然而,存在的工作重点是检测封闭的偏见集,定义了先验的偏见,将研究限制为众所周知的概念。在本文中,我们解决了出现OpenBias的文本到图像生成模型中开放式偏见检测的挑战,该模型是一条新管道,该管道可识别和量化双质量的严重性,而无需访问任何预编译的集合。OpenBias有三个阶段。在第一阶段,我们利用大型语言模型(LLM)提出偏见,给定一组字幕。其次,目标生成模型使用相同的字幕绘制图像。最后,一个视觉问题回答模型认识到了先前提出的偏见的存在和范围。我们研究了稳定扩散1.5、2和XL强调新偏见的稳定扩散,从未研究过。通过定量实验,我们证明了OpenBias与当前的封闭式偏见检测方法和人类判断一致。

pcr在检测锥虫菌的Cruzi Henrique ...
Andrade,S。G。Caracterizaçãodecepas de trypanosoma cruzi cruzi Iseladas norecôncavoBaiano。 Revista de Patologia热带。 卷。 3,p。 65-121。 1974。 Andrade,S.G。; Magalhães,J.B。锥虫菌株的生物植物和扎伊米亚:与临床数据和实验病理学的相关性。 Revista da Sociedade Brasileira de Medicina Tropical。 卷。 30,p。 27-35。 1997。 Andrade,V。; Brodskyn,c。 Andrade,S.G。 同工酶模式与克鲁氏锥虫菌株的生物bahaviour之间的相关性。 皇家热带医学和卫生学会的交易。 卷。 76,p。 796-799。 1983。 Avila,I。I.等。 通过分析PCR的分析 - 放大微圆的可变区域序列,对来自南部和中部América的Cruzi菌群的精神分裂质分析。 分子和生化寄生虫学。 卷。 42,p.175 - 188。 1990。 Britto,C。等。 一种简单的方案,用于血液样本中存在于血样中的锥虫动力学DNA的物理裂解,以及在聚合酶链反应(PCR)中使用的ITSM-基于慢性Chagas疾病的诊断。 memóriasdo Instituto Oswaldo Cruz。 。 v。88,p。 171-172.1993。 Britto,C等。 聚合酶链链反应检测人类血液样本中锥虫的锥虫瘤作为诊断和治疗评估的工具。 寄生虫学。 卷。 110,p。 241-247.1995。 ______。 等。 卷。 卷。Andrade,S。G。Caracterizaçãodecepas de trypanosoma cruzi cruzi Iseladas norecôncavoBaiano。Revista de Patologia热带。卷。3,p。 65-121。1974。Andrade,S.G。; Magalhães,J.B。锥虫菌株的生物植物和扎伊米亚:与临床数据和实验病理学的相关性。 Revista da Sociedade Brasileira de Medicina Tropical。 卷。 30,p。 27-35。 1997。 Andrade,V。; Brodskyn,c。 Andrade,S.G。 同工酶模式与克鲁氏锥虫菌株的生物bahaviour之间的相关性。 皇家热带医学和卫生学会的交易。 卷。 76,p。 796-799。 1983。 Avila,I。I.等。 通过分析PCR的分析 - 放大微圆的可变区域序列,对来自南部和中部América的Cruzi菌群的精神分裂质分析。 分子和生化寄生虫学。 卷。 42,p.175 - 188。 1990。 Britto,C。等。 一种简单的方案,用于血液样本中存在于血样中的锥虫动力学DNA的物理裂解,以及在聚合酶链反应(PCR)中使用的ITSM-基于慢性Chagas疾病的诊断。 memóriasdo Instituto Oswaldo Cruz。 。 v。88,p。 171-172.1993。 Britto,C等。 聚合酶链链反应检测人类血液样本中锥虫的锥虫瘤作为诊断和治疗评估的工具。 寄生虫学。 卷。 110,p。 241-247.1995。 ______。 等。 卷。 卷。Andrade,S.G。; Magalhães,J.B。锥虫菌株的生物植物和扎伊米亚:与临床数据和实验病理学的相关性。Revista da Sociedade Brasileira de Medicina Tropical。卷。30,p。 27-35。1997。Andrade,V。; Brodskyn,c。 Andrade,S.G。 同工酶模式与克鲁氏锥虫菌株的生物bahaviour之间的相关性。 皇家热带医学和卫生学会的交易。 卷。 76,p。 796-799。 1983。 Avila,I。I.等。 通过分析PCR的分析 - 放大微圆的可变区域序列,对来自南部和中部América的Cruzi菌群的精神分裂质分析。 分子和生化寄生虫学。 卷。 42,p.175 - 188。 1990。 Britto,C。等。 一种简单的方案,用于血液样本中存在于血样中的锥虫动力学DNA的物理裂解,以及在聚合酶链反应(PCR)中使用的ITSM-基于慢性Chagas疾病的诊断。 memóriasdo Instituto Oswaldo Cruz。 。 v。88,p。 171-172.1993。 Britto,C等。 聚合酶链链反应检测人类血液样本中锥虫的锥虫瘤作为诊断和治疗评估的工具。 寄生虫学。 卷。 110,p。 241-247.1995。 ______。 等。 卷。 卷。Andrade,V。; Brodskyn,c。 Andrade,S.G。同工酶模式与克鲁氏锥虫菌株的生物bahaviour之间的相关性。皇家热带医学和卫生学会的交易。卷。76,p。 796-799。1983。Avila,I。I.等。通过分析PCR的分析 - 放大微圆的可变区域序列,对来自南部和中部América的Cruzi菌群的精神分裂质分析。分子和生化寄生虫学。卷。42,p.175 - 188。1990。Britto,C。等。一种简单的方案,用于血液样本中存在于血样中的锥虫动力学DNA的物理裂解,以及在聚合酶链反应(PCR)中使用的ITSM-基于慢性Chagas疾病的诊断。memóriasdo Instituto Oswaldo Cruz。。v。88,p。 171-172.1993。 Britto,C等。 聚合酶链链反应检测人类血液样本中锥虫的锥虫瘤作为诊断和治疗评估的工具。 寄生虫学。 卷。 110,p。 241-247.1995。 ______。 等。 卷。 卷。v。88,p。 171-172.1993。Britto,C等。聚合酶链链反应检测人类血液样本中锥虫的锥虫瘤作为诊断和治疗评估的工具。寄生虫学。卷。110,p。 241-247.1995。 ______。 等。 卷。 卷。110,p。 241-247.1995。______。等。卷。卷。聚合酶链反应检测:对慢性chagas病的诊断的新见解。memóriasdo Instituto Oswaldo Cruz。94,p。 305-306.1999。______。等。o。被Xenodiongensis和聚合酶链反应MemóriosDo Instituto Oswaldo Cruz揭示的经过治疗的chagasic患者的寄生虫持久性。v。96,2001。p。 1-4。 Clark,C。G.核糖增生:原生动物分类法的分子方法。 in:Lee,J.J。 &Soldo,A.T。 (ed。 ):原子学方面的协议。 Allen Press。 1992。 Clark,C.G。 ; Martin,D.S。 ; Diamond,L.S。 ruboprinting揭示的Anuran锥虫之间的系统发育关系。 真核微生物学杂志。 42,p。 92-96。 1999。 Lana,M。; Tafuri,W。L.锥虫Cruzi adoençade Chagas。 in:Neves,D。P。; Melo,A。L。; Genaro,A。&Linardi,P。M(编辑。 ):人类寄生虫; ed。 雅典。 2002。v。96,2001。p。 1-4。Clark,C。G.核糖增生:原生动物分类法的分子方法。in:Lee,J.J。 &Soldo,A.T。(ed。):原子学方面的协议。Allen Press。 1992。 Clark,C.G。 ; Martin,D.S。 ; Diamond,L.S。 ruboprinting揭示的Anuran锥虫之间的系统发育关系。 真核微生物学杂志。 42,p。 92-96。 1999。 Lana,M。; Tafuri,W。L.锥虫Cruzi adoençade Chagas。 in:Neves,D。P。; Melo,A。L。; Genaro,A。&Linardi,P。M(编辑。 ):人类寄生虫; ed。 雅典。 2002。Allen Press。1992。Clark,C.G。 ; Martin,D.S。 ; Diamond,L.S。 ruboprinting揭示的Anuran锥虫之间的系统发育关系。 真核微生物学杂志。 42,p。 92-96。 1999。 Lana,M。; Tafuri,W。L.锥虫Cruzi adoençade Chagas。 in:Neves,D。P。; Melo,A。L。; Genaro,A。&Linardi,P。M(编辑。 ):人类寄生虫; ed。 雅典。 2002。Clark,C.G。; Martin,D.S。; Diamond,L.S。ruboprinting揭示的Anuran锥虫之间的系统发育关系。真核微生物学杂志。42,p。 92-96。 1999。 Lana,M。; Tafuri,W。L.锥虫Cruzi adoençade Chagas。 in:Neves,D。P。; Melo,A。L。; Genaro,A。&Linardi,P。M(编辑。 ):人类寄生虫; ed。 雅典。 2002。42,p。 92-96。1999。Lana,M。; Tafuri,W。L.锥虫Cruzi adoençade Chagas。 in:Neves,D。P。; Melo,A。L。; Genaro,A。&Linardi,P。M(编辑。 ):人类寄生虫; ed。 雅典。 2002。Lana,M。; Tafuri,W。L.锥虫Cruzi adoençade Chagas。in:Neves,D。P。; Melo,A。L。; Genaro,A。&Linardi,P。M(编辑。):人类寄生虫; ed。雅典。2002。

调查机器学习和自然语言处理技术用于检测饮食失调:系统文献评论
自然语言处理(NLP)和机器学习(ML)领域的最新发展已显示自动文本处理的显着改进。同时,人类语言的表达在发现心理健康问题中起着核心作用。虽然口语在接受患者的访谈中被隐式评估,但书面语言也可以为临床专业人员提供有趣的见解。现有的工作中经常研究心理健康问题,例如抑郁或焦虑。然而,还在研究饮食失调的诊断如何从这些新技术中受益。在本文中,我们介绍了该领域最新研究的系统概述。Our investigation encompasses four key areas: (a) an analysis of the metadata from published papers, (b) an examination of the sizes and speci fi c topics of the datasets employed, (c) a review of the application of machine learning techniques in detecting eating disorders from text, and fi nally (d) an evaluation of the models used, focusing on their performance, limitations, and the potential risks associated with current methodologies.
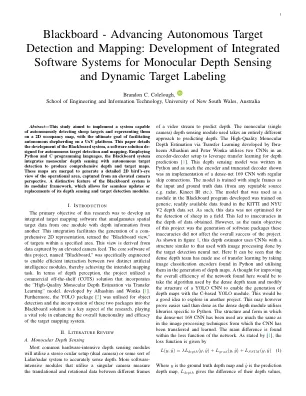
黑板 - 前进的自主目标检测和映射:开发用于单眼深度感应和动态tar
摘要 - 该研究旨在实施能够自主检测绵羊目标并在2D占用图上代表它们的系统,其最终目标是促进在UXV平台上自主牧羊。本文详细介绍了Blackboard System的开发,Blackboard System是一种用于自动目标检测和映射的软件解决方案。使用Python和C编程语言,Blackboard系统将单眼深度感测与自主目标检测,以产生全面的深度和目标图。这些地图是合并的,以产生从高架相机的角度捕获的操作区域的详细的2D鸟视图。黑板系统的独特功能是其模块化框架,它允许无缝更新或更换其深度传感和目标检测模块。
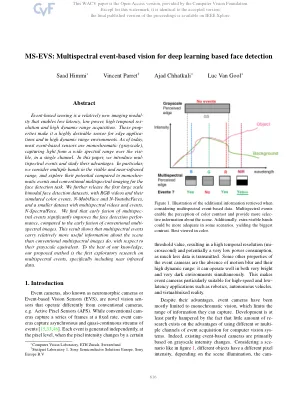
MS-EVS:基于多光谱事件的基于深度学习的面部检测的愿景
基于事件的传感是一种相对较新的成像模态,可实现低潜伏期,低功率,高时间分解和高动态范围采集。这些支持使其成为边缘应用和在高动态范围环境中的高度可取的传感器。截至今天,大多数基于事件的传感器都是单色的(灰度),在单个通道中捕获了Visi-ble上广泛光谱范围的光。在本文中,我们介绍了穆斯特朗事件并研究了它们的优势。尤其是我们在可见范围内和近红外范围内考虑多个频段,并探索与单色事件和用于面部检测任务的传统多光谱成像相比的潜力。我们进一步发布了第一个大型双峰面检测数据集,其中包含RGB视频及其模拟色彩事件,N-Mobiface和N-Youtubefaces,以及带有多光谱视频和事件的较小数据集,N-SpectralFace。与常规多频谱图像的早期融合相比,多阶段事件的早期融合可显着改善面部检测性能。此结果表明,相对于灰度等效物,多光谱事件比传统的多光谱图像具有相对有用的有关场景的信息。据我们所知,我们提出的方法是关于多光谱事件的首次探索性研究,特别是包括近红外数据。

ai增强的预测系统,用于僵局僵局:云应用中的早期检测和预防
在云应用程序的领域中,线程僵局构成了重大挑战,影响了系统性能和可靠性。用于检测和解决僵局的传统方法通常在动态和可扩展的云环境中落下。本文为AI增强的预测系统提供了一个高级框架,该系统旨在早期发现和预防线程僵局。通过利用机器学习算法和实时数据分析,提出的系统可以预测潜在的死锁情景,然后才能升级为关键问题。该框架与基于云的应用程序集成在一起,以监视线程交互,确定指示即将发生僵局的模式并推荐先发制人的动作。通过广泛的模拟和现实世界的案例研究,我们证明了方法在减少僵局的发生率和改善整体应用稳定性方面的有效性。这项研究通过为并发计算的最具挑战性的方面之一提供积极的解决方案,从而有助于开发更具弹性的云系统。
从检测到消除:基于铁的纳米材料驱动肿瘤成像和晚期疗法
基于铁的纳米材料(INM),由于其特殊的磁性,出色的生物相容性和功能,已在肿瘤诊断和治疗中已发展为强大的工具。我们在此处概述了诸如氧化铁纳米颗粒,元素掺杂纳米复合材料和铁基有机框架(MOFS)等INM如何显示多功能性,以改善肿瘤成像和治疗。在成像方面,INM提高了磁共振成像(MRI)和光声成像(PAI)等技术的灵敏度和准确性,并支持多模式成像平台的开发。关于治疗,INM在高级策略中起着关键作用,例如免疫疗法,磁性高温和协同组合疗法,这些疗法有效地克服了肿瘤诱导的耐药性并降低全身毒性。INM与人工智能(AI)和放射线学的整合进一步扩展了其精确肿瘤识别,治疗优化和扩增治疗监测的能力。INM现在将材料科学与先进的计算和临床创新联系起来,以实现下一代癌症诊断和治疗学。

AI驱动的网络钓鱼检测系统
网络钓鱼攻击涉及通过伪装成一个值得信赖的实体来获取敏感信息的欺诈尝试,已经变得越来越复杂和普遍。传统的网络钓鱼检测方法通常依赖于启发式或基于签名的技术,这可能很难与不断发展的网络钓鱼策略保持同步。本文探讨了人工智能(AI)在增强网络钓鱼检测系统中的应用。AI驱动的方法利用机器学习算法,自然语言处理和模式识别,以更高的准确性和效率来识别和减轻网络钓鱼威胁。通过分析大量数据,这些系统可以检测出可能避免常规方法的网络钓鱼尝试的微妙模式和异常。该摘要讨论了网络钓鱼检测中采用的各种AI方法,包括受监督和无监督的学习技术,集合方法和深度学习模型。此外,它研究了AI-wive系统在现实世界中的有效性及其适应新兴的网络钓鱼策略的潜力。本文以目前的挑战和该领域的研究的未来方向进行了概述,强调需要持续发展以解决网络钓鱼威胁的动态性质。

使用深度学习和蒙特卡洛树搜索的勒索软件检测的混合框架
勒索软件攻击已成为一种主要的网络安全威胁,其越来越复杂的技术经常逃避传统的检测方法。提出了一个新颖的框架,该框架通过蒙特卡洛树搜索(MCT)的动态决策能力来协同深度学习模型的预测优势,从而为不断发展的勒索软件变体带来的挑战提供了全面的解决方案。通过严格的评估,混合动力框架在降低误报的同时表现出显着提高的检测准确性,表现优于常规机器学习模型。MCT的整合允许探索多个决策路径,从而实时增强了系统对新型威胁的适应性。此外,提出的模型还保持了计算效率,使其对于企业环境中的实时部署而言是可行的。结果证明了混合模型是现代网络安全中强大的防御机制的潜力,提供了一种可扩展有效的工具来减轻勒索软件威胁。