XiaoMi-AI文件搜索系统
World File Search System模式

在处理个人数据中的上瘾模式
在欧盟之外,各个国家和国际机构也认识到在线上瘾实践的影响。例如,联合国强调了在数字环境中解决数字成瘾和保护儿童权利的必要性4。但是,特定法规因国家而异。有些人已经实施了与技术成瘾特征有关的准则或法律,而另一些人仍在探索实际方法。例如,纽约立法机关于2024年6月通过的《儿童法案》第5号法案的停止成瘾性饲料剥削(安全)将禁止社交媒体平台根据某些情况下的建议算法将内容提供给18岁以下的用户。取而代之的是,这些平台将必须为年轻用户提供逆式供稿6。

循环器功能在约瑟夫森连接电路和Majorana零模式的编织
参考使用以下样式:文章:作者列表。句子中的纸张标题。期刊卷号,初始网页号或文章编号(年)的名称。预印本:作者列表。句子中的纸张标题。[doi或url](年)的预印本。[如果可能的话,使用已发表论文的详细信息更新参考]带有分配的DOI:作者列表的研究数据集。标题。存储库名称,标识符[doi以URL表示](年)。书籍:作者列表。所有单词大写的标题(出版社出版,年份)。只能引用仅发表或接受的文章和预印本;没有“提交”或“正在审查”的手稿。仅在常用或策划网站时才允许引用网站。请勿参考个人网站。请勿使用脚注或尾注。每个参考必须仅参考一项工作。参考文献不得在列表中重复。参考应限于70。参考必须首先按文本中引用的顺序进行编号,然后在图形传奇,表传奇和框中编号。
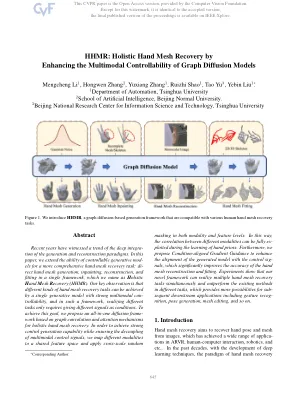
HHMR:通过增强图扩散模型的多模式可控性
近年来见证了一代和重建范式深入融合的趋势。在本文中,我们扩展了可控制的生成模块的能力,以实现更全面的手网恢复任务:在单个框架中,手工网格的生成,内部网状,重建,重建和拟合,我们将其命名为H olistic H和MESH R Ecovery(HHMR)。我们的主要观察结果是,具有强大多模式可偿还性的单个生成模型可以实现不同类型的手网恢复任务,并且在这样的框架中,实现不同的任务只需要给出不同的信号作为条件。为了实现这一目标,我们提出了基于图形卷积和整体手工网状恢复的注意力卷积和注意力机制的多合一扩散框架。为了实现强大的控制能力,同时确保多模式控制信号的解耦,我们将不同的模态映射到共享特征空间并应用跨尺度随机

多模式面部图像生成的扩散驱动的GAN倒置
摘要我们提出了一种新的多模式面部图像生成方法,该方法将文本提示和视觉输入(例如语义掩码或涂鸦图)转换为照片真实的面部图像。为此,我们通过使用DM中的多模式特征在预训练的GAN的潜在空间中使用多模式特征来结合一般的对抗网络(GAN)和扩散模型(DMS)的优势。我们提供了一个简单的映射和一个样式调制网络,可将两个模型链接起来,并在特征地图和注意力图中将有意义的表示形式转换为潜在代码。使用gan inversion,估计的潜在代码可用于生成2D或3D感知的面部图像。我们进一步提出了一种多步训练策略,该策略将文本和结构代表反映到生成的图像中。我们提出的网络生成了现实的2D,多视图和风格化的面部图像,这些图像与输入很好。我们通过使用预训练的2D和3D GAN来验证我们的方法,我们的结果表现优于现有方法。我们的项目页面可在https://github.com/1211SH/diffusion-driven_gan-inversion/。

idb invest 的新愿景和商业模式 - NET
根据 IDB 集团之前支持私营部门的经验,IDB Invest 成立后的前 18 个月预计将“立即投入工作”。相反,他们致力于建立团队,并在多元化背景中创造目标统一。4 到 2017 年底,该机构发展势头强劲,到 2020 年初,目标是实现全面整合,然后逐步审慎增长,到 2025 年实现全额资本部署,在此之后,正如在釜山所预测的那样,达到长期可持续的运营水平。5 一场全球疫情彻底改变了这一道路,将 2020 年至 2022 年变成了加速增长的几年,以满足该地区的紧急需求,并且与当前讨论相关的是,将全额资本部署的日期提前了两年,原定于 2023 年底实现。6
可再生能源可持续商业模式回顾
注:改编自 Bryant, ST、Straker, K. 和 Wrigley, C. (2018) 撰写的《电力类型:日益可再生能源领域的能源公用事业商业模式》。《清洁生产杂志》,195,1032-1046。& Siksnelyte-Butkiene, I.、Streimikiene, D.、Balezentis, T. 和 Volkov, A. (2023) 撰写的《能源生产消费的推动因素和障碍:商业模式的概念回顾和综合分析》。《可持续能源技术与评估》,57,103163。

认知控制与抑制中的焦点和大规模同步模式:综述
研究认知功能与潜在大脑活动之间的关系一直是、现在仍然是最大的神经科学挑战之一。功能性磁共振成像 (fMRI) 是一种领先的成像方法,用于量化和绘制与大脑活动相关的代谢变化的地理分布,包括静息时 (Riedl et al., 2016) 或主动处理信息时 (Chen and Glover, 2015)。脑电图 (EEG) 是一种成熟的电生理技术,可安全、非侵入性地 (Cohen, 2017) 记录静息或执行任务时 (Zani and Proverbio, 2003) 突触后浅层大脑活动的时间准确记录 (Burle et al., 2015)。结合脑磁图 (MEG),EEG 对理解不同频率的大脑振荡与特定心理状态和过程的关系做出了广泛贡献 (Benedek et al., 2014)。此外,它还允许测量振幅、相位和同步性的局部变化,并探索与特定认知功能(Perfetti 等人,2011 年;Groppe 等人,2013 年;Roux 和 Uhlhaas,2014 年)相关的空间和时间分布,例如注意力和记忆力。本文将回顾支持认知控制和抑制的焦点和大规模协调模式的当前知识。

MADTP:多模式对准引导的动态令牌修剪,以加速视力 - 语言变压器
视觉 - 语言变压器(VLT)最近显示出巨大的成功,但同时伴随着大量的计算成本,其中主要原因可以归因于大量的视觉和语言令牌。存在用于压缩VLTS的令牌修剪研究主要遵循基于单模式的方案,但忽略了对齐不同模态来指导令牌修剪过程的关键作用,从而导致重要的代币在另一个模态分支中错误地修剪一个模态。同时,现有的VLT修剪作品也缺乏基于不同输入样本动态压缩每一层的灵活性。为此,我们提出了一个名为M Ultodal的新颖框架,用于加速变化VLT的木质制成d ynamic t ynamic t oken p Runing(MADTP)。具体来说,我们首先引入了精心设计的多模式对齐指导(MAG)模块,该模块可以使相同语义概念的特征与不同的模式相结合,以确保修剪的代币对所有模式都不太重要。我们进一步设计了一种新型的dy-namic令牌修剪(DTP)模块,该模块可以根据不同的输入实例自适应地调节每个层中的令牌压缩比。对各种基准测试的广泛实验表明,MADTP可以显着确定多种模型的计算复杂性,同时保留竞争性能。值得注意的是,当将MADTP应用于NLVR2数据集中的BLIP模型时,可以将GFLOPS降低80%,而性能降低少于4%。该代码可在https://github.com/double125/madtp上找到。

U-Limb:关于健康和中风后手臂运动控制的多模式、多中心数据库
1 “Enrico Piaggio”研究中心和 Dipartimento di Ingegneria dell'Informazione,比萨拉戈大学 Lucio Lazzarino 1, 56122 比萨,意大利; 2 用于人类合作与康复的软机器人,Fondazione Istituto Italiano di Tecnologia,Via Morego 30, 16163 Genova,意大利; 3 RSI - 慕尼黑工业大学 (TUM) 慕尼黑机器人与机器智能学院机器人与系统智能主席,Heßstr。 134, 80797 慕尼黑, 德国; 4 MoMiLab 研究中心,IMT 卢卡高级研究学院,Piazza S. Francesco 19, 55100 Lucca, Italy; 5 苏黎世大学神经病学系血管神经病学和神经康复科,Frauenklinikstrasse 26, 8006 苏黎世,瑞士;6 汉诺威医学院矫形外科系生物力学和生物材料实验室 (LBB),L384, 30625 汉诺威,德国;7 苏黎世健康科学与技术系机器人与智能系统研究所康复工程实验室,CLA H 1.1 Tannenstrasse 3, 8092 苏黎世,瑞士